1.本发明涉及水下机器人技术领域,尤其涉及一种面向水下桩基础的有缆检修机器人。
背景技术:
2.在《全国海洋经济发展规划》指导下,我国滨海地区风电等清洁能源快速发展,但海上风电系统受海洋混杂环境影响,故障率偏高,水下检修作业存在一定的实施难度和作业风险。
3.传统海上风电桩基础检修主要依靠人工,但具备完备检修知识的高级技术工人严重短缺,作业的稳定性和可靠性都受到很大的影响。相关机器人作业时易受暗流影响,作业稳定性难以保证,且大部分机器人检与修割裂难以完成全流程作业。
技术实现要素:
4.本发明的目的是为了解决现有技术中存在的缺点,而提出的一种面向水下桩基础的有缆检修机器人,该检修机器人既可以实现夹持水下桩基础,还可以实现表面清理、无损探伤以及湿法焊接的功能,完成检修作业。
5.为了实现上述目的,本发明采用了如下技术方案:
6.一种面向水下桩基础的有缆检修机器人,包括环抱装置、执行机构和水下平台;
7.所述环抱装置用于实现对水下桩基础的夹持以保证检修作业的稳定性;
8.所述执行机构实现检修作业;
9.所述水下平台用于实现机器人整体运动位姿的改变;
10.所述环抱装置包括左右相对设置的两组环抱组件;
11.每组所述环抱组件包括吸盘式电磁铁、末端夹持装置、大臂、转动法兰、环抱装置伺服电机舱以及环抱装置减速机舱;所述大臂的一端通过转动法兰与环抱装置减速机舱连接,所述大臂的另一端通过末端夹持装置连接座与末端夹持装置连接,所述末端夹持装置上安装有吸盘式电磁铁,所述环抱装置减速机舱上设有l型角码安装槽,所述l型角码安装槽用于连接环抱装置减速机舱和环抱装置伺服电机舱;
12.所述环抱装置伺服电机舱内部设有伺服电机,所述环抱装置伺服电机舱上设有设有环抱装置伺服电机接线端子,用于伺服电机接线;
13.所述环抱装置减速机舱内部设有减速机。
14.优选地,所述执行机构包括四自由度机械臂和末端检修装置,所述四自由度机械臂依其运动空间,包括x轴机械臂、y轴机械臂、z轴机械臂和u轴机械臂。
15.优选地,所述x轴机械臂包括机械臂浮力材料、机械臂安装座、x轴线性滑轨、x轴线性滑轨安装座、x轴滚珠丝杠、x轴工作台、x轴伺服电机;
16.其中,所述机械臂浮力材料与机械臂安装座连接,所述机械臂安装座与水下平台连接,所述机械臂安装座通过x轴线性滑轨安装座与y轴机械臂安装座连接,所述x轴线性滑
轨与x轴线性滑轨安装座安装固定;
17.其中,所述机械臂浮力材料的一侧部安装有x轴滚珠丝杠,所述x轴滚珠丝杠上设有x轴工作台,所述x轴滚珠丝杠的端部设有x轴伺服电机,所述x轴伺服电机上设有x轴伺服电机接线端子,用于x轴伺服电机接线,所述x轴伺服电机上设有x轴光电编码器接线端子,用于x轴光电编码器接线。
18.优选地,所述y轴机械臂包括相对设置的y轴第一浮力材料、y轴第二浮力材料、以及用于连接y轴第一浮力材料和y轴第二浮力材料的y轴机械臂安装座,所述y轴机械臂安装座上安装有y轴伺服电机,所述y轴伺服电机的输出轴连接有y轴滚珠丝杠,所述y轴滚珠丝杠上设置有y轴工作台;
19.其中,所述y轴伺服电机上设有y轴伺服电机接线端子,用于y轴伺服电机接线;所述y轴伺服电机上设有y光电编码器接线端子,用于y轴光电编码器接线。
20.优选地,所述z轴机械臂包括z轴安装座、固定安装在z轴安装座上的z轴滚珠丝杠、以及设于z轴滚珠丝杠端部的z轴伺服电机,所述z轴伺服电机的输出轴与z轴滚珠丝杠连接,所述z轴滚珠丝杠上设置有z轴工作台,所述z轴工作台与u轴安装座连接,所述z轴安装座与y轴机械臂连接;
21.其中,所述z轴伺服电机上设有z轴伺服电机接线端子,用于z轴伺服电机接线;所述z轴伺服电机上设有z轴光电编码器接线端子,用于z轴光电编码器接线。
22.优选地,所述u轴机械臂包括u轴安装座、u轴伺服电机、u轴连接法兰、u轴行星减速机、高压水枪、高压软管、水枪喷嘴、高压水枪安装座;
23.其中,所述u轴安装座通过u轴安装座m5螺孔与z轴机械臂连接,所述u轴行星减速机安装在u轴安装座上,所述u轴伺服电机与u轴行星减速机连接,所述高压水枪安装在高压水枪安装座上,所述高压水枪的一端与高压软管连接,所述高压水枪的另一端与水枪喷嘴连接,所述u轴行星减速机通过u轴减速机安装槽与u轴连接法兰连接;
24.其中,所述u轴伺服电机上设有u轴伺服电机接线端子,用于u轴伺服电机接线;所述u轴行星减速机上设有u轴光电编码器接线端子,用于u轴光电编码器接线。
25.优选地,所述末端检修装置包括焊枪安装座、固定安装在焊枪安装座上的焊枪柄,所述焊枪柄上设有焊枪头,所述焊枪头上连接有焊条;
26.其中,所述焊枪安装座通过末端执行机构l型扩展架与末端执行机构安装座连接,所述末端执行机构安装座与末端执行机构固定座子连接。
27.优选地,所述末端执行机构固定座子分别与传感器安装座和水浸探头支撑架连接,所述传感器安装座上安装有线性结构光传感器和工业相机;所述水浸探头支撑架上安装有水浸探头。
28.与现有技术相比,本发明具有以下有益效果:
29.本发明提供了一种面向水下桩基础的有缆检修机器人,较目前已有的有缆检修机器人相比,本发明提供的有缆检修机器人具有可靠的环抱装置,保证后续检修作业的稳定性,除此以外,本发明提供的有缆检修机器人不仅可以实现对水下桩基础的检查,还可以实现对水下桩基础表面处理的和焊接维修,完成对水下桩基础的检修全流程作业,与人工检修相比,极大提升了作业的稳定性并保证了作业人员的安全。
附图说明
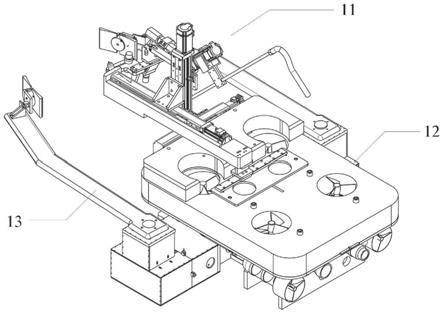
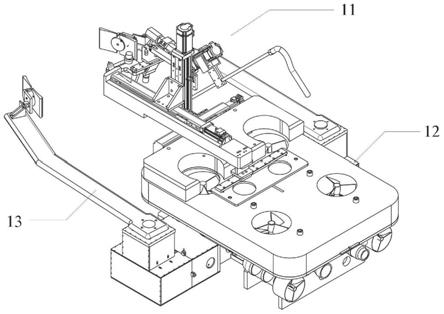
30.图1为本发明的整体结构示意图;
31.图2为本发明中环抱装置的结构示意图;
32.图3为本发明中执行机构x轴机械臂的结构示意图;
33.图4为本发明中执行机构y轴机械臂的结构示意图;
34.图5为本发明中执行机构z轴机械臂的结构示意图;
35.图6为本发明中执行机构u轴机械臂的结构示意图;
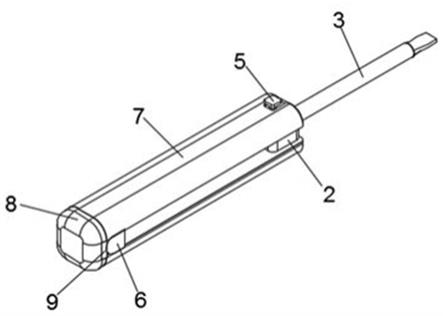
36.图7为本发明中执行机构末端检修装置的结构示意图。
37.图中:11
‑
执行机构、12
‑
水下平台、13
‑
环抱装置、21
‑
吸盘式磁铁、22
‑
末端夹持装置、23
‑
末端夹持装置连接座、24
‑
大臂、25
‑
转动法兰、26
‑
环抱装置减速机舱、27
‑
环抱装置伺服电机舱、28
‑
大臂m5沉头孔、29
‑
环抱装置减速机舱l型角码安装槽、30
‑
环抱装置伺服电机接线端子、301
‑
机械臂浮力材料、302
‑
机械臂安装座、303
‑
x轴线性滑轨、304
‑
x轴线性滑轨安装座、305
‑
x轴滚珠丝杠、306
‑
x轴工作台、307
‑
x轴伺服电机、308
‑
机械臂浮力材料m6沉头孔、309
‑
机械臂安装座m5内六角螺孔、310
‑
x轴线性滑轨安装座m8沉头孔、311
‑
x轴线性滑轨m5沉头孔、312
‑
x轴伺服电机接线端子、313
‑
x轴光电编码器接线端子、41
‑
y轴第一浮力材料、42
‑
y轴伺服电机、43
‑
y轴工作台、44
‑
y轴第二浮力材料、45
‑
y轴滚珠丝杠、46
‑
y轴机械臂安装座、47
‑
y轴第一浮力材料m5内六角螺孔、48
‑
y轴伺服电机接线端子、49
‑
y轴光电编码器接线端子、51
‑
z轴伺服电机、52
‑
z轴安装座、53
‑
z轴滚珠丝杠、54
‑
z轴工作台、55
‑
z轴安装座m5内六角螺孔、56
‑
z轴光电编码器接线端子、57
‑
z轴伺服电机接线端子、58
‑
z轴工作台m5沉头孔、601
‑
u轴安装座、602
‑
u轴伺服电机、603
‑
u轴连接法兰、604
‑
u轴行星减速机、605
‑
u轴减速机安装槽、606
‑
高压水枪、607
‑
高压软管、608
‑
水枪安装螺栓、609
‑
水枪喷嘴、610
‑
u轴安装座m5螺孔、611
‑
u轴伺服电机接线端子、612
‑
u轴光电编码器接线端子、613
‑
高压水枪安装座、614
‑
高压水枪安装座m5螺孔、701
‑
焊枪安装座、702
‑
焊枪柄、703
‑
焊枪头、704
‑
焊条、705
‑
末端执行机构l型扩展架、706
‑
末端执行机构安装座、707
‑
末端执行机构固定座子、708
‑
传感器安装座、709
‑
线性结构光传感器、710
‑
工业相机、711
‑
水浸探头、712
‑
水浸探头支撑架、713
‑
u轴连接法兰安装座m6沉头孔、714
‑
末端执行机构m4沉头孔、715
‑
传感器紧固m4沉头孔、716
‑
末端执行机构安装座m6螺母。
具体实施方式
38.下面结合附图将对本发明实施例中的技术方案进行清楚、完整地描述,以使本领域的技术人员能够更好的理解本发明的优点和特征,从而对本发明的保护范围做出更为清楚的界定。本发明所描述的实施例仅是本发明一部分实施例,而不是全部的实施例,基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
39.参照图1
‑
图7,一种面向水下桩基础的有缆检修机器人,包括环抱装置13、执行机构11和水下平台12;
40.具体的,参照图2,所述环抱装置13包括左右相对设置的两组环抱组件;
41.每组所述环抱组件包括吸盘式电磁铁21、末端夹持装置22、大臂24、转动法兰25、环抱装置伺服电机舱27以及环抱装置减速机舱26;所述大臂24的一端通过转动法兰25与环
抱装置减速机舱26连接,所述大臂24的另一端通过末端夹持装置连接座23与末端夹持装置22连接,所述大臂24上设有四个m5沉头孔28,四个所述m5沉头孔用于连接大臂24和环抱装置减速机舱26。所述末端夹持装置22上安装有吸盘式电磁铁21,所述吸盘式电磁铁21用于实现对水下桩基础的高效吸附,所述环抱装置减速机舱26上设有四个l型角码安装槽29,所述l型角码安装槽29用于连接环抱装置减速机舱26和环抱装置伺服电机舱27;
42.其中,所述环抱装置伺服电机舱27内部设有伺服电机,所述环抱装置伺服电机舱27上设有设有环抱装置伺服电机接线端子30,用于伺服电机接线;
43.所述环抱装置减速机舱26内部设有减速机。
44.其中,所述环抱装置13用于实现对水下桩基础的夹持以保证检修作业的稳定性;所述执行机构11实现检修作业;所述水下平台12用于实现机器人整体运动位姿的改变;所述水下平台12确定水下桩基础位姿后,所述环抱装置13通过大臂24的移动以及吸盘式磁铁21实现对水下桩基础的夹持,所述执行机构11通过四自由度机械臂的移动,调整下述的高压水枪606、水浸探头711、工业相机710、线性结构光709以及焊枪702的位置,实现对水下桩基础稳定地表面清理、无损检测和焊接修复。
45.具体的,所述执行机构包括四自由度机械臂和末端检修装置,所述四自由度机械臂依其运动空间,包括x轴机械臂、y轴机械臂、z轴机械臂和u轴机械臂。
46.具体的,参照图3,所述x轴机械臂包括机械臂浮力材料301、机械臂安装座302、x轴线性滑轨303、x轴线性滑轨安装座304、x轴滚珠丝杠305、x轴工作台306、x轴伺服电机307;
47.所述机械臂浮力材料301上设有四个机械臂浮力材料m6沉头孔308,四个机械臂浮力材料m6沉头孔308用于连接机械臂浮力材料301和机械臂安装座302,所述机械臂安装座302上设有两个机械臂安装座m5内六角螺孔309,两个机械臂安装座m5内六角螺孔309用于固定机械臂安装座302和水下平台12。所述x轴线性滑轨安装座304上设有四个机械臂线性滑轨安装座m8沉头孔310,四个机械臂线性滑轨安装座m8沉头孔310用于连接机械臂安装座302和y轴机械臂安装座46。所述机械臂安装座302通过x轴线性滑轨安装座304与y轴机械臂安装座连接,所述x轴线性滑轨303上设有十六个x轴线性滑轨m5沉头孔311,十六个x轴线性滑轨m5沉头孔311用于连接x轴线性滑轨303和x轴线性滑轨安装座304。
48.其中,所述机械臂浮力材料301的一侧部安装有x轴滚珠丝杠305,所述x轴滚珠丝杠305上设有x轴工作台306,所述x轴滚珠丝杠305的端部设有x轴伺服电机307,所述x轴伺服电机307上设有x轴伺服电机接线端子312,用于x轴伺服电机接线,所述x轴伺服电机307上设有x轴光电编码器接线端子313,用于x轴光电编码器接线。
49.具体的,参照图4,所述y轴机械臂包括相对设置的y轴第一浮力材料41、y轴第二浮力材料44、以及用于连接y轴第一浮力材料41和y轴第二浮力材料44的y轴机械臂安装座46,所述y轴机械臂安装座46上安装有y轴伺服电机42,所述y轴伺服电机42的输出轴连接有y轴滚珠丝杠45,所述y轴滚珠丝杠45上设置有y轴工作台43;其中,所述y轴第一浮力材料41上设有四个y轴第一浮力材料m5内六角螺孔47,四个y轴第一浮力材料内六角螺孔47用于连接y轴第一浮力材料41和y轴机械臂安装座46。
50.其中,所述y轴伺服电机42上设有y轴伺服电机接线端子48,用于y轴伺服电机接线;所述y轴伺服电机42上设有y光电编码器接线端子49,用于y轴光电编码器接线。
51.具体的,参照图5,所述z轴机械臂包括z轴安装座52、固定安装在z轴安 装座52上
的z轴滚珠丝杠53、以及设于z轴滚珠丝杠53端部的z轴伺服电机51,所述z轴伺服电机51的输出轴与z轴滚珠丝杠53连接,所述z轴滚珠丝杠53上设置有z轴工作台54,所述z轴工作台54上设有六个z轴工作台m5沉头孔58,六个所述z轴工作台m5沉头孔58用于连接z轴工作台54和u轴安装座52,所述z轴安装座52上设有四个z轴安装座m5内六角螺孔55,四个z轴安装座m5内六角螺孔55用于连接z轴安装座52和y轴机械臂;
52.其中,所述z轴伺服电机51上设有z轴伺服电机接线端子57,用于z轴伺服电机接线;所述z轴伺服电机51上设有z轴光电编码器接线端子56,用于z轴光电编码器接线。
53.具体的,参照图6,所述u轴机械臂包括u轴安装座601、u轴伺服电机602、u轴连接法兰603、u轴行星减速机604、高压水枪606、高压软管607、水枪喷嘴609、高压水枪安装座613;
54.所述u轴安装座601设有九个u轴安装座m5螺孔610,九个u轴安装座m5螺孔610用于连接u轴机械臂和z轴机械臂,所述u轴行星减速机604安装在u轴安装座601上,所述u轴伺服电机602与u轴行星减速机604连接,所述高压水枪606安装在高压水枪安装座613上,所述高压水枪606的一端通过水枪连接螺栓608与高压软管607连接,所述高压水枪606的另一端与水枪喷嘴609连接,所述u轴行星减速机604通过u轴减速机安装槽605与u轴连接法兰603连接;所述高压水枪安装座613上设有四个高压水枪安装座m5螺孔614,四个高压水枪安装座m5螺孔614用于连接高压水枪606和u轴机械臂。
55.其中,所述u轴伺服电机602上设有u轴伺服电机接线端子611,用于u轴伺服电机接线;所述u轴行星减速机604上设有u轴光电编码器接线端子612,用于u轴光电编码器接线。
56.具体的,参照图7,所述末端检修装置包括焊枪安装座701、固定安装在焊枪安装座701上的焊枪柄702,所述焊枪柄702上设有焊枪头703,所述焊枪头703上连接有焊条704;
57.其中,所述焊枪安装座701通过末端执行机构l型扩展架705与末端执行机构安装座706连接,所述末端执行机构安装座706与末端执行机构固定座子707连接。所述末端执行机构l型扩展架705上设有四个u轴连接法兰安装m6沉头孔713,四个u轴连接法兰安装m6沉头孔713用于连接末端执行机构l型扩展架705和u轴连接法兰603。所述末端执行机构固定座子707上设有八个末端执行机构m4沉头孔714,八个末端执行机构m4沉头孔714用于固定水浸探头支撑架712和传感器安装座708于末端执行机构固定座子707之上。
58.其中,所述末端执行机构固定座子707分别与传感器安装座708和水浸探头支撑架712连接,所述传感器安装座708上安装有线性结构光传感器709和工业相机710;所述水浸探头支撑架712上安装有水浸探头711。所述水浸探头支撑架712上设有两个传感器紧固m4沉头孔715,两个传感器紧固m4沉头孔715用于固定水浸探头711于水浸探头支撑架712之上。所述末端执行机构安装座706上设有两个末端执行机构安装座m6螺母716,两个末端执行机构安装座m6螺母716用于固定末端执行机构安装座706于末端执行机构l型扩展架705之上。
59.本发明的工作过程如下:水下平台12移动到水下桩基础附近;环抱装置13对水下桩基础进行夹持,具体的,环抱装置伺服电机舱中伺服电机和环抱装置减速机舱中减速机驱动转动法兰25带动大臂24转动,末端夹持装置22可根据水下桩基础实际直径调整夹持位姿,完成夹持动作后,控制吸盘式电磁铁21进行磁吸附,贴合于桩基础表面;基于执行机构11中u轴机械臂搭载的高压软管607送水,高压水枪606对水下桩基础进行表面清理;通过u轴连接法兰603固定的末端执行机构安装座706上的工业相机710对水下桩基础进行目视检
测,之后x轴伺服电机307驱动x轴滚珠丝杠305移动带动x轴工作台306移动,y轴伺服电机42驱动y轴滚珠丝杠45带动y轴工作台43移动,z轴伺服电机51驱动z轴滚珠丝杠53带动z轴工作台54移动,u轴伺服电机602和u轴行星减速机604驱动u轴连接法兰603旋转带动末端执行机构安装座706移动,通过四自由度机械臂的移动带动执行机构11上的水浸探头711移动实现对结构件内部损伤的检测,若检测发现存在可以进行焊接修复的表面损伤,驱动x轴、y轴、z轴机械臂带动工业相机710识别焊缝中心点,随后移动焊枪柄702带动焊枪头703进行湿法焊接修复,至此,检修作业流程结束。
60.综上所述,本发明提供的一种面向水下桩基础的有缆检修机器人,该机器人可通过水下平台进行移动,识别桩基础;此外本发明提供的环抱装置可以基于磁吸附原理对水下桩基础进行夹持,保证后续检修作业的稳定性,且拥有四自由度机械臂,通过调整机械臂进而调整末端执行机构传感器的位置,通过末端执行机构搭载的高压水枪、水浸探头、工业相机、线性结构光以及焊枪对水下桩基础进行稳定的表面清理、无损检测和焊接修复。通过上述检修机器人,可以完成检修全流程作业,能够最大程度地提升检修作业的效率,降低漏检率和误检率,保证作业人员的安全。
61.本发明中披露的说明和实践,对于本技术领域的普通技术人员来说,都是易于思考和理解的,且在不脱离本发明原理的前提下,还可以做出若干改进和润饰。因此,在不偏离本发明精神的基础上所做的修改或改进,也应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。