1.本发明涉及信号交叉口管理和智能网联车辆控制技术领域,具体而言涉及一种智能网联混合交通流信号交叉口车辆到达预测修正方法。
背景技术:
2.信号交叉口作为城市路网的关键节点,是交通拥堵诱发点和交通冲突常发点,也是造成车辆高油耗和尾气污染的重点区域。通过前人研究分析可知,其主要原因在于人类驾驶员和传统车辆无法提前获知前方交叉口的信号灯状态,经常在红灯期间到达交叉口,由此带来的急减速、急加速、长时间怠速及多次启停,会造成车辆延误、燃料消耗、污染物排放的增加。此外车辆在红灯期间排队以及启动损失时间也拉大了车辆车头时距,绿灯利用率降低,从而影响了交叉口的通行效率。
3.智能网联技术的发展,为信号交叉口管理带来了全新的契机和挑战。具体来说,智能网联车辆通过车
‑
路通讯技术提前获取交叉口信号和上游交通状态,据此优化行驶轨迹,减少启停次数和怠速时间,降低延误、能耗和事故风险。智能网联车辆优化轨迹的有效性和安全性依赖于对于信号灯状态和上游车辆状态的短期预测。在实现完全智能网联环境之前,将有相当长一段时间出于混合智能网联环境,即智能网联车辆(cav)和人类驾驶车辆(hdv)混行。在这种环境下,人类驾驶行为的随机性增加了预测整体交通运行状态的难度。目前亟需一种交通状态预测修正方法,能够借助成熟的道路交通检测设备追踪hdv行驶状态,结合智能驾驶车辆采集的信息,对预测到达时间进行修正,使其更加精确。
技术实现要素:
4.本发明针对现有技术中的不足,提供一种一种智能网联混合交通流信号交叉口车辆到达预测修正方法,为智能网联车辆行驶轨迹优化和动态调整提供信息支撑,达到提升交叉口通行效率和减少油耗的目的。
5.为实现上述目的,本发明采用以下技术方案:
6.第一方面,本发明实施例提出了一种智能网联混合交通流信号交叉口车辆到达预测修正方法,所述修正方法包括以下步骤:
7.s1,在目标交叉口区域上游路段设置控制区;
8.s2,检测进入控制区的车辆及其状态,对于无网联的人类驾驶车辆,获取其前车信息,预测其到达交叉口时间;对于智能网联车辆,提供前车预测信息和交叉口信号信息,智能网联车辆自主设计其行驶轨迹,并反馈行驶轨迹和预计到达交叉口时间;
9.s3,当前时刻控制区内距离交叉口最近的车辆被标记为0号车辆,检测其进入交叉口的时间,结合相应车辆的预测到达时间,判断是否对控制区内其他车辆进行预测修正;若进行修正,则转入步骤s4;否则,重新标记0号车辆,继续步骤s3;
10.s4,自0号车辆起,按照编号升序依次对控制区内车辆到达预测时间进行修正;对于人类驾驶车辆,结合前车修订后的预测到达时间,修正其预测到达时间;对于智能网联车
辆,通报其前车修正后的预测时间,供其进行行驶轨迹调整,并反馈更新的行驶轨迹和修正的预测到达时间;满足终止条件后,停止修正,转入步骤s3。
11.可选地,步骤s1中,将目标交叉口各进口道上游路段300米至交叉口停车线内设置为控制区。
12.可选地,步骤s2中,在目标交叉口区域和其上游路段设置的控制区,布设交叉口智能控制单元、路侧单元和交通检测器,搭建中心式智能交叉口系统,与智能网联车辆进行信息交互;中心式智能交叉口系统获取进入控制区的车辆及其状态,预测人类驾驶车辆到达交叉口时间,记录智能网联车辆反馈的行驶轨迹和预计到达交叉口时间。
13.可选地,步骤s3中,结合相应车辆的预测到达时间,判断是否对控制区内车辆进行预测修正的过程包括以下步骤:
14.s31,将当前时刻距离停车线最近的车辆标记为初始0号车辆,其所在车道上后续车辆按照由近及远的位置依次编号;
15.s32,查询0号车辆的预测到达时间如果在预测到达时间之前、或晚于预测到达时间但仍在同一绿灯相位时间内检测到该车到达,则进入步骤s33;否则进入步骤s34;
16.s33,将0号车辆的到达状态信息传输至智能控制单元,进行阈值判断:
[0017][0018]
其中为0号车辆实际达到时间,ε为预测误差阈值;当实际到达时间和预测到达时间之间的误差大于预测误差阈值,转入步骤s4进行到达预测修正;
[0019]
s34,如果在预测到达时间所在绿灯相位结束时仍未检测到0号车辆达到,智能控制单元则在绿灯相位结束时直接转入步骤s4进行到达预测修正。
[0020]
可选地,步骤s4中,按照编号升序依次对控制区内车辆到达预测时间进行修正的过程包括以下步骤:
[0021]
s41,判断当前修正的i号车辆和其前车i
‑
1号车辆类型:
[0022]
如果i号车辆为智能网联车辆,i号车辆自主调整行驶轨迹并向智能控制单元发送最新轨迹和预测到达时间,结束对i号车辆的修正,转入步骤s43;
[0023]
如果i号车辆为无网联的人类驾驶车辆,i
‑
1号车辆为智能网联车辆,智能控制单元根据最新前车轨迹重新预测hdv到达时间,结束对i号车辆的修正,转入步骤s43;
[0024]
如果i号车辆和i
‑
1号车辆均为无网联的人类驾驶车辆,进入步骤s42;
[0025]
s42,当前车(i
‑
1)修正后预测到达时间比修正前的提前了一个绿灯相位,即r是车辆行驶方向信号灯红灯时长,后车预测到达时间调整为:
[0026][0027][0028]
其中,是i号车辆修正后的预测到达时间,是仅受车辆动力系统和道路限速影响的最早到达时间,h
s
是该交叉口该车道车辆排队消散的饱和车头时距,t
s
是车辆启动损失时间,g为车辆行驶方向信号灯有效绿灯时长;
[0029]
当前车修正后的预测通过停车线的时间早于修正前的时间但仍在同一个绿灯相位中,即则后车预测到达时间调整为:
[0030][0031]
其中,是i号车辆修正前的预测到达时间,n
before
和n
after
分别是预测修正前后i号车在绿灯消散队列中的位置,h(n
after
)是相应位置车辆通过交叉口停车线时的车头时距;
[0032]
当前车修正后的预测到达时间比修正前晚了一个绿灯相位,即且前车在红灯期间到达停车线,则后车预测到达时间调整为:
[0033][0034]
当前车修正后的预测到达时间比修正前晚了一个绿灯相位,即且前车在绿灯期间到达停车线,则后车预测到达时间调整为:
[0035][0036]
当前车修正后的预测进入交叉口的时间晚于修正前的时间但仍在同一个绿灯相位中,即且前车在红灯期间到达停车线,则后车预测到达时间调整为:
[0037][0038]
当前车修正后的预测进入交叉口的时间晚于修正前的时间但仍在同一个绿灯相位中,即且前车在绿灯期间到达停车线,则后车预测到达时间调整为:
[0039][0040]
当0号车辆满足第一条件时,当0号车辆满足第二条件时,
第一条件是在预测到达时间之前、或晚于预测时间但仍在同一绿灯相位时间内检测到该车到达;第二条件是在预测到达时间所在绿灯相位结束时仍未检测到车辆达到;
[0041]
s43,判断以下条件是否满足:
[0042]
③
i=n,其中n为控制区内0号车所在车道上车辆总数;
[0043]
④
i号车辆修正前后的预测时间满足
[0044]
若满足以上任意一条,则结束步骤s43;否则令i=i 1,转入步骤s41。
[0045]
第二方面,本发明实施例提出了一种中心式智能交叉口系统,所述中心式智能交叉口系统包括在目标交叉口区域和其上游路段设置的控制区,布设交叉口智能控制单元、路侧单元和交通检测器;
[0046]
所述交通检测器和路侧单元用于检测进入控制区的车辆的行驶状态,将检测结果反馈至智能控制单元;
[0047]
所述智能控制单元包括以下功能模块:
[0048]
通讯模块,其功能包括:
①
接收路侧单元传输的控制区车辆信息;
②
获取实时信号灯状态信息;
③
向智能网联车辆发送其前车预测信息及信号灯信息,接收智能网联车辆反馈的行驶轨迹和预计到达交叉口时间;
[0049]
计算模块,其功能包括:
①
根据控制区内车辆信息,预测人类驾驶车辆到达交叉口时间;记录智能网联车辆反馈的行驶轨迹和预计到达交叉口时间;
②
结合车辆实际到达时间和相应车辆的预测到达时间,判断是否对控制区内车辆进行预测修正;
③
当前检测到实际到达的且其实际到达时间与预测到达时间之间的误差大于预测误差阈值的车辆标记为0号车辆;自0号车辆起,按照编号升序依次对控制区内车辆到达预测时间进行修正;对于人类驾驶车辆,结合前车修订后的预测到达时间,修正其预测到达时间;对于智能网联车辆,记录其修正后的行驶轨迹和预计到达交叉口时间。
[0050]
本发明的有益效果是:
[0051]
本发明提出的智能网联混合交通流信号交叉口车辆到达预测修正方法,可以充分结合利用现有道路交通检测器数据,提供更加精确有效的交通状态预测,智能网联车辆据此制定的优化行驶轨迹更加合理有效,从而提高信号交叉口通行效率,减少能耗并降低事故风险。
附图说明
[0052]
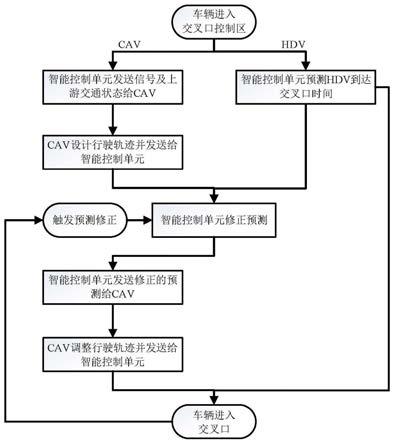
图1为本发明实施例的车辆到达预测修正方法的流程图。
[0053]
图2为本发明实施例的智能信号交叉口系统构成示意图。
[0054]
图3为本发明实施例与传统到达时间预测方法的评价指标对比图,图3(a)为车辆延误变化情况,图3(b)为车辆油耗变化情况。
具体实施方式
[0055]
现在结合附图对本发明作进一步详细的说明。
[0056]
需要注意的是,发明中所引用的如“上”、“下”、“左”、“右”、“前”、“后”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
[0057]
实施例一
[0058]
图1为本发明实施例的车辆到达预测修正方法的流程图。该修正方法包括以下步骤:
[0059]
步骤s1、在目标交叉口区域上游路段设置控制区。
[0060]
在目标交叉口区域和其上游路段设置的控制区,布设交叉口智能控制单元、路侧单元和交通检测器,搭建中心式智能交叉口系统,与智能网联车辆进行信息交互。图2为本发明实施例的智能信号交叉口系统构成示意图。
[0061]
步骤s2、智能交叉口系统检测到进入控制区的车辆及其状态,对于无网联的人类驾驶车辆(hdv),智能控制单元获取其前车信息,预测其到达交叉口时间;对于智能网联车辆(cav),智能控制单元提供前车预测信息,cav自主设计其行驶轨迹,并将轨迹和预计到达交叉口时间发送给智能控制单元。示例性地,对于人类驾驶车辆采用智能驾驶员模型(intelligent driver model,idm)进行轨迹预测,对于智能网联车辆直接通过v2i通讯获取其优化轨迹。在实施例中,提供了一种信号交叉口相关数据,具体如表1所示:
[0062]
表1.本实施例的信号交叉口相关参数
[0063][0064][0065]
步骤s3、当前时刻控制区内距离交叉口最近的车辆被标记为0号车辆,检测其进入交叉口的时间,结合相应车辆的预测到达时间,判断是否对控制区内其他车辆进行预测修正;若进行修正,则转入步骤s4;否则,重新标记0号车辆,继续步骤s3。
[0066]
具体的,包括以下步骤:
[0067]
步骤s31:当前时刻距离停车线最近的车辆被标记为0号车辆,其所在车道上后续车辆按照由近及远的位置依次编号。查询该车的预测到达时间若在预测时间之前,或晚于预测时间但仍在同一绿灯相位时间内检测到该车到达,则进入步骤s32;否则进入步骤s33。
[0068]
步骤s32:0号车辆的到达状态信息(车辆识别号,到达时间等)传输至智能控制单元,进行阈值判断。
[0069]
[0070]
其中为0号车辆实际达到时间,ε为预测误差的阈值。当实际到达时间和预测到达时间之间的误差大于该阈值,则进行修正,即转入权利要求1所述的步骤s4。
[0071]
步骤s33:当在预测时间所在绿灯相位结束时仍未检测到车辆达到,智能控制单元则在绿灯相位结束时进行预测修正,即直接转入权利要求1所述的步骤s4。
[0072]
假设预测与实际到达时间误差阈值取ε=0.3秒。以第一次确认进行预测修正为例,该时刻控制区内和进入交叉口车辆情况如表2所示:
[0073]
表2.第一次预测修正时控制区内和进入交叉口车辆情况汇总
[0074][0075]
按照步骤s31,当前进入交叉口的0号车辆早于预测时间到达,进入步骤s32;按照步骤s32,实际到达时间和预测到达时间之间的误差0.6大于阈值0.3,则确认进行预测修正,进入步骤s4。
[0076]
步骤s4、自0号车辆起,按照编号升序依次对控制区内车辆到达预测时间进行修正;对于人类驾驶车辆,结合前车修订后的预测到达时间,修正其预测到达时间;对于智能网联车辆,通报其前车修正后的预测时间,供其进行行驶轨迹调整,并反馈更新的行驶轨迹和修正的预测到达时间;满足终止条件后,停止修正,转入步骤s3。
[0077]
具体步骤如下:
[0078]
步骤s41:根据当前修正的i号车辆和其前车i
‑
1号车辆类型,采取不同操作,具体如表3所示:
[0079]
表3.步骤s41具体操作
[0080][0081]
步骤s42:智能控制单元基于不同场景对车辆达到时间采取如下修正:
[0082]
场景1:当前车(i
‑
1)修正后预测到达时间比修正前的提前了一个绿灯相位,即r是车辆行驶方向信号灯红灯时长,后车预测到达时间调整为:
[0083]
[0084][0085]
其中,是i号车辆修正后的预测到达时间,是仅受车辆动力系统和道路限速影响的最早到达时间,h
s
是该交叉口该车道车辆排队消散的饱和车头时距,t
s
是车辆启动损失时间,g为车辆行驶方向信号灯有效绿灯时长。
[0086]
场景2:当前车修正后的预测通过停车线的时间早于修正前的时间但仍在同一个绿灯相位中,即则后车预测到达时间调整为:
[0087][0088]
其中,是i号车辆修正前的预测到达时间,n
before
和n
after
分别是预测修正前后i号车在绿灯消散队列中的位置,h(n
after
)是相应位置车辆通过交叉口停车线时的车头时距。
[0089]
场景3:当前车修正后的预测到达时间比修正前晚了一个绿灯相位,即且前车在红灯期间到达停车线,则后车预测到达时间调整为:
[0090][0091]
场景4:当前车修正后的预测到达时间比修正前晚了一个绿灯相位,即且前车在绿灯期间到达停车线,则后车预测到达时间调整为:
[0092][0093]
场景5:当前车修正后的预测进入交叉口的时间晚于修正前的时间但仍在同一个绿灯相位中,即且前车在红灯期间到达停车线,则后车预测到达时间的调整和场景3一致。
[0094]
场景6:当前车修正后的预测进入交叉口的时间晚于修正前的时间但仍在同一个绿灯相位中,即且前车在绿灯期间到达停车线,则后车预测到达时间调整为:
[0095][0096]
特别地,当0号车辆符合步骤s31情况时,当0号车辆符合步骤s33情况时,
[0097]
步骤s43:
[0098]
判断以下条件是否满足:
[0099]
①
i=n,其中n为控制区内0号车所在车道上车辆总数;
[0100]
②
i号车辆修正前后的预测时间满足
[0101]
若满足以上任意一条,则结束步骤s43;否则令i=i 1,转入步骤s41。
[0102]
以表2为例,结合步骤s4,第一次车辆到达预测时间修正结果如表4所示:
[0103]
表4.第一次车辆到达预测时间修正结果
[0104][0105]
本实施例的智能网联混合交通流信号交叉口车辆到达预测修正方法的效果如图3所示,其中下降率1是指不同cav渗透率下实施本发明的方法后指标值相对于纯人类驾驶车辆环境下的指标值的下降率;下降率2是指相同cav渗透率下实施预测修正后的指标值相对于不实施修正的指标值的下降率。
[0106]
实施例二
[0107]
本发明实施例提出了一种中心式智能交叉口系统。如图2所示,该中心式智能交叉口系统包括在目标交叉口区域和其上游路段设置的控制区,布设交叉口智能控制单元、路侧单元和交通检测器。
[0108]
交通检测器和路侧单元用于检测进入控制区的车辆的行驶状态,将检测结果反馈至智能控制单元。
[0109]
智能控制单元包括以下功能模块:
[0110]
通讯模块,其功能包括:
①
接收路侧单元传输的控制区车辆信息;
②
获取实时信号灯状态信息;
③
向智能网联车辆发送其前车预测信息及信号灯信息,接收智能网联车辆反馈的行驶轨迹和预计到达交叉口时间。
[0111]
计算模块,其功能包括:
①
根据控制区内车辆信息,预测人类驾驶车辆到达交叉口时间;记录智能网联车辆反馈的行驶轨迹和预计到达交叉口时间;
②
结合车辆实际到达时间和相应车辆的预测到达时间,判断是否对控制区内车辆进行预测修正;
③
当前检测到实际到达的且其实际到达时间与预测到达时间之间的误差大于预测误差阈值的车辆标记为0号车辆;自0号车辆起,按照编号升序依次对控制区内车辆到达预测时间进行修正;对于人类驾驶车辆,结合前车修订后的预测到达时间,修正其预测到达时间;对于智能网联车辆,记录其修正后的行驶轨迹和预计到达交叉口时间。
[0112]
以上仅是本发明的优选实施方式,本发明的保护范围并不仅局限于上述实施例,凡属于本发明思路下的技术方案均属于本发明的保护范围。应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明原理前提下的若干改进和润饰,应视为本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。