1.本发明涉及汽车技术领域,尤其涉及一种车辆换道碰撞预警方法及装置。
背景技术:
2.随着车联网技术c
‑
v2x(cellular vehicle to everything,车用无线通信)的迅速发展,汽车基于c
‑
v2x技术感知外界的能力,越来越强。相比于dsrc (dedicated short range communication,专用短程通信)技术,c
‑
v2x具有高可靠性、低延时、更好的远距离传输可达性特点,因此基于c
‑
v2x的汽车主动安全越来越受到重视。比起摄像头、雷达等传统的车辆环境感知方案,c
‑
v2x 受环境变化影响小,在视线遮挡、雨天雾天等恶劣环境下仍能稳定工作。
3.在汽车驾驶过程中,车辆跟随和换道是两个最基本的驾驶行为。然而,驾驶员换道相比较于车辆跟随更加复杂,主要原因在于换道涉及行车的环境感知、轨迹规划和轨迹跟踪,使得换道的决策过程相对于车辆跟随更加复杂。随着车联网技术c
‑
v2x的发展,为基于c
‑
v2x的车路协同换道控制提供了通信基础,使得换道车辆能够实时的获得周围相关车辆的运行状态,增强了对环境的感知能力,因此研究基于c
‑
v2x的换道控制具有重要的意义。
4.目前,在换道控制方面大多数主要考虑换道开始时是否有碰撞危险,若检测安全就换道,却比较少考虑换道过程中碰撞危险的实时监控,即便有考虑换道过程中的碰撞危险,但大多考虑直道方面的碰撞预警,却对弯道等复杂道路的碰撞预警考虑较少。
5.因此,亟需一种车辆换道碰撞预警方法,能适用于各种道路形状下车辆换道的碰撞预警,大大提高了车辆换道的安全性和实用性。
技术实现要素:
6.本发明实施例所要解决的技术问题在于,提供一种车辆换道碰撞预警方法及装置,基于c
‑
v2x技术对各种道路形状下车辆换道的碰撞进行预警,大大提高了车辆换道的安全性和实用性。
7.为了解决上述技术问题,本发明实施例提供了一种车辆换道碰撞预警方法,其在道路行驶过程中通过c
‑
v2x技术对多个远车均进行实时监测的主车上实现,所述方法包括以下步骤:
8.所述主车待接收到主车驾驶员的换道指令后,根据行驶道路周边预设路侧单元发送的v2i信息以及同车道上所有远车发送的v2v信息,对与同车道前后向远车之间的碰撞风险进行检测;
9.所述主车若检测到与同车道前后向远车之中至少一个之间存在碰撞风险,则向主车驾驶员发出碰撞预警以及取消所述换道指令;
10.所述主车若检测到与同车道前后向远车之间均不存在碰撞风险,则根据所述换道指令及所述预设路侧单元发送的v2i信息,确定出变换车道及所述变换车道上的远车,且根据所述变换车道上所有远车发送的v2v信息,进一步对与所述变换车道上所有远车之间的
碰撞风险进行检测,并待检测到与所述变换车道上至少一个远车之间存在碰撞风险后,向主车驾驶员发出碰撞预警以及取消所述换道指令。
11.其中,所述方法进一步包括:
12.所述主车若检测到与同车道前后向远车之间以及与所述变换车道上所有远车之间均不存在碰撞风险后,则基于预设目标函数输出的期望目标来得到最优的换道轨迹和换道时间,并根据所述最优的换道轨迹和换道时间,实现换道行驶。
13.其中,所述预设目标函数的期望目标为前轮转角最小和纵向车速最小,并基于5次多项式和遗传算法计算得到的。
14.其中,所述换道指令是通过识别主车方向盘的转动方向及其转动角度超过预定角度来获得的,和/或通过识别主车转向灯开启方向来获得的。
15.其中,对与任一远车之间的碰撞风险进行检测均通过以下步骤来实现,具体包括:
16.所述主车根据所述预设路侧单元发送的v2i信息以及当前所检测远车发送的v2v信息,并结合所述主车自身的v2v信息,通过矢量法迭代计算两车相对距离的矢量投影值及预警距离阈值的矢量投影值;
17.所述主车若判断出某次迭代计算得到的两车相对距离的矢量投影值小于等于预警距离阈值的矢量投影值,则终止迭代计算,并认定与当前所检测远车存在碰撞风险,且得到与当前所检测远车的碰撞时间;
18.所述主车若判断出每次迭代计算得到的两车相对距离的矢量投影值均大于预警距离阈值的矢量投影值,直至迭代计算执行完毕,则认定与当前所检测远车不存在碰撞风险。
19.其中,通过公式来判定所述主车与当前远车之间的相对方位;其中,x
hv
表示所述主车质心在全局坐标下的横坐标值; x
rv
表示当前远车质心在全局坐标下的横坐标值;y
hv
表示所述主车质心在全局坐标下的纵坐标值;y
rv
表示当前远车质心在全局坐标下的纵坐标值;x
rv>hv
表示当前远车相对于所述主车在全局坐标下的横坐标值;y
rv>hv
表示当前远车相对于所述主车在全局坐标下的纵坐标值;θ为所述主车从全球导航卫星系统定位 gnss上获得的罗盘角,以逆时针为正方向。
20.其中,若
‑
1≤y
rv>hv
≤1&&x
rv>hv
≥0,则认定当前远车相对所述主车的方位为正前方;
21.若y
rv>hv
>1&&x
rv>hv
≥0,则认定当前远车相对所述主车的方位为右前方;
22.若y
rv>hv
<
‑
1&&x
rv>hv
≥0,则认定当前远车相对所述主车的方位为左前方;
23.若
‑
1≤y
rv>hv
≤1&&x
rv>hv
≤0,则认定当前远车相对所述主车的方位为后方;
24.若y
rv>hv
<
‑
1&&x
rv>hv
≤0,则认定当前远车相对所述主车的方位为左后方;
25.若y
rv>hv
>1&&x
rv>hv
≤0,则认定当前远车相对所述主车的方位为右后方;
26.若y
rv>hv
≤
‑
1&&
‑
1≤x
rv>hv
≤1,则认定当前远车相对所述主车的方位为左方;
27.若y
rv>hv
≥1&&
‑
1≤x
rv>hv
≤1,则认定当前远车相对所述主车的方位为右方。
28.本发明实施例还提供了一种车辆换道碰撞预警装置,其在道路行驶过程中通过c
‑
v2x技术对多个远车均进行实时监测的主车上实现,包括同车道碰撞风险检测单元、换道前碰撞预警单元和换道中碰撞预警单元;其中,
29.所述同车道碰撞风险检测单元,用于所述主车待接收到主车驾驶员的换道指令后,根据行驶道路周边预设路侧单元发送的v2i信息以及同车道上所有远车发送的v2v信息,对与同车道前后向远车之间的碰撞风险进行检测;
30.换道前碰撞预警单元,用于所述主车若检测到与同车道前后向远车之中至少一个之间存在碰撞风险,则向主车驾驶员发出碰撞预警以及取消所述换道指令;
31.换道中碰撞预警单元,用于所述主车若检测到与同车道前后向远车之间均不存在碰撞风险,则根据所述换道指令及所述预设路侧单元发送的v2i信息,确定出变换车道及所述变换车道上的远车,且根据所述变换车道上所有远车发送的v2v信息,进一步对与所述变换车道上所有远车之间的碰撞风险进行检测,并待检测到与所述变换车道上至少一个远车之间存在碰撞风险后,向主车驾驶员发出碰撞预警以及取消所述换道指令。
32.其中,还包括:换道路径优化单元;其中,
33.所述换道路径优化单元,用于所述主车若检测到与同车道前后向远车之间以及与所述变换车道上所有远车之间均不存在碰撞风险后,则基于预设目标函数输出的期望目标来得到最优的换道轨迹和换道时间,并根据所述最优的换道轨迹和换道时间,实现换道行驶。
34.其中,所述换道指令是通过识别主车方向盘的转动方向及其转动角度超过预定角度来获得的,和/或通过识别主车转向灯开启方向来获得的。
35.实施本发明实施例,具有如下有益效果:
36.1、本发明基于c
‑
v2x技术并结合路测单元rsu(road side unit)提供的 v2i信息,对各种道路行驶状况下与所有远车之间的碰撞风险进行实时监测,且在同车道前后向远车及变换车道上所有远车之间存在碰撞风险情况下,发出碰撞预警并取消换道指令,从而实现对各种道路形状下车辆换道的碰撞进行预警,大大提高了车辆换道的安全性和实用性;
37.2、本发明对车辆的识别受天气等因素影响较小,只依赖于车辆状态数据而不依赖于道路曲率信息,从而提高了行车安全性与舒适性。
附图说明
38.为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,根据这些附图获得其他的附图仍属于本发明的范畴。
39.图1为本发明实施例提供的车辆换道碰撞预警方法的流程图;
40.图2为本发明实施例提供的车辆换道碰撞预警方法中对弯道行驶的主车与远车进行碰撞风险计算的一矢量分析图;
41.图3为本发明实施例提供的车辆换道碰撞预警方法中对弯道行驶的主车与远车进行碰撞风险计算的另一矢量分析图;
42.图4为本发明实施例提供的车辆换道碰撞预警方法中远车相对于主车的相对方位的矢量坐标图;
43.图5为本发明实施例提供的车辆换道碰撞预警方法中弯道行驶过程中车辆由外侧向内侧换道的运动轨迹图;
44.图6为本发明实施例提供的车辆换道碰撞预警方法中弯道行驶过程中车辆由内侧向外侧换道的运动轨迹图;
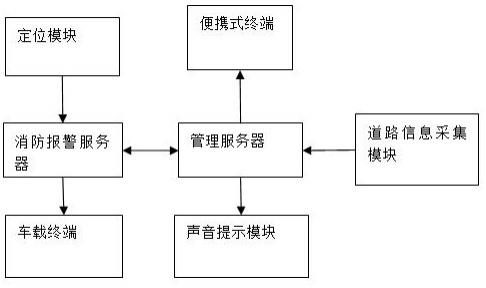
45.图7为本发明实施例提供的车辆换道碰撞预警装置的结构示意图。
具体实施方式
46.为使本发明的目的、技术方案和优点更加清楚,下面将结合附图对本发明作进一步地详细描述。
47.如图1所示,为本发明实施例中,提供的一种车辆换道碰撞预警方法,其在道路(如直道、弯道等)行驶过程中通过c
‑
v2x技术对多个远车(八个方向上的相邻车辆)均进行实时监测的主车上实现,所述方法包括以下步骤:
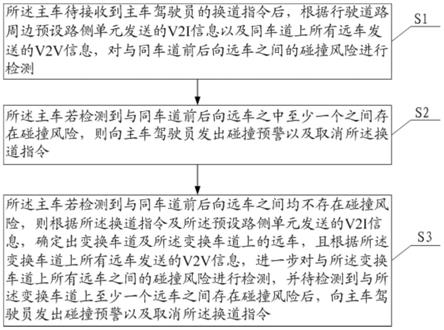
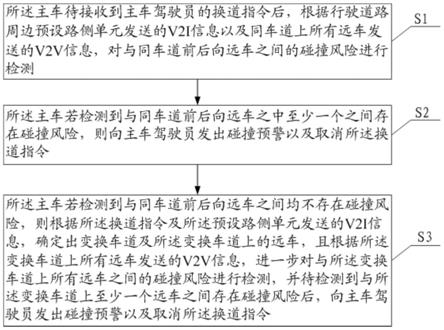
48.步骤s1、所述主车待接收到主车驾驶员的换道指令后,根据行驶道路周边预设路侧单元发送的v2i信息以及同车道上所有远车发送的v2v信息,对与同车道前后向远车之间的碰撞风险进行检测;
49.具体过程为,首先,主车接收主车驾驶员的换道指令;其中,该换道指令是通过识别主车方向盘的转动方向及其转动角度超过预定角度来获得的,和/或通过识别主车转向灯开启方向来获得的。
50.其次,根据行驶道路周边预设路侧单元发送的v2i信息以及同车道上所有远车发送的v2v信息,对与同车道前后向远车之间的碰撞风险进行检测。
51.以同车道前向远车作为当前所检测远车为例,对碰撞风险检测进行详细说明,具体如下:
52.(1)主车根据预设路侧单元(如移动通信基站等)发送的v2i信息以及当前所检测远车发送的v2v信息,并结合主车自身的v2v信息,通过矢量法迭代计算两车相对距离的矢量投影值及预警距离阈值的矢量投影值;其中,v2i信息包括但不限于行驶道路周边路口信息、道路信息和红绿灯信息等,因此在v2i 信息中可以提取主车及任一远车的车道信息;v2v信息包括但不限于位置坐标、航向角、横摆角、方向盘转角、车速、加速度;
53.(2)主车若判断出某次迭代计算得到的两车相对距离的矢量投影值小于等于预警距离阈值的矢量投影值,则终止迭代计算,并认定与当前所检测远车存在碰撞风险,且得到与当前检测存在碰撞风险的碰撞时间;或若判断出每次迭代计算得到的两车相对距离的矢量投影值均大于预警距离阈值的矢量投影值,直至迭代计算执行完毕,则认定与当前所检测远车不存在碰撞风险。
54.对于同车道后向远车及所有其它同车道远车的碰撞风险,可采用类似上述 (1)~(2)步骤来实现,在此不再赘述。
55.在一个实施例中,如图2和图3所示,以弯道行驶的主车和远车为例,通过矢量法对二者的碰撞风险进行计算,具体如下:
56.在一个实施例中,如图2和图3所示,以弯道行驶的主车及其同车道的前方远车为例,通过矢量法对二者的碰撞风险进行计算,具体如下:
57.弯道行驶中的远车rv(remote vehicle)与主车hv(host vehicle)同车道并位于主车hv前方,且主车hv和远车rv的车速分别v
hv
、v
rv
,方向盘转角st
hv
、 st
rv
,车头方向角为h
hv
,h
rv
(车头方向角以车头前进方向与大地坐标系y轴的夹角,逆时针为正),α
hv
、α
rv
为主车
hv与远车rv的转向角(转向角以顺时针方向为正,逆时针方向为负),将矢量车速在b1为起始点,α
hv
转动。此时,主车hv和远车rv之间的碰撞风险检测,其目的就是找到远车rv相对于主车 hv在单位时间内距离主车hv的距离,即在图2和图3中找到两车相对距离的矢量投影值
dcpai
;其中,i=1~n;n为迭代计算总次数。
58.若n=1,则在图2中,远车rv相对于主车hv行驶车速为两车相对距离矢量在的矢量投影为其中,投影的计算公式如下:
[0059][0060]
其中,θ1为矢量与的夹角,a1为投影点;
[0061]
这里
[0062]
因此
[0063]
则
[0064]
因此,为找到主车hv到远车rv的最近距离,那么此时就是一个典型的数学问题,即线段外一点主车hv到线段的最短距离。
[0065]
由于无论主车hv在线段的哪一个位置,公式(4)都成立,因此
[0066]
可设定系数则
[0067][0068][0069]
其中,b1点坐标表示为:
[0070]
[0071][0072]
则p1坐标表示为:
[0073][0074][0075]
表示的物理意义是:如果a1在向量上,那么该点即为在第一次循环n=1 时,远车rv相对于主车hv最近距离点为cpa1为向量即为dcpa1;如果a1点在的延长线上,用表示dcpa1;如果a1在
‑
的延长线上,那么用表示dcpa1。
[0076]
可以理解的是,根据公式(7)~(8),可以得到推导出b
n
点基于gps坐标系(全局坐标系)的坐标:
[0077][0078]
a
rv,n
=na
rv,0
[0079]
其中,α
rv,n
=nα
rv,0
ꢀꢀꢀ
(10)
[0080]
为远车rv初始状态的速度矢量;为远车rv初始状态的加速度矢量;α
rv,0
为远车rv初始状态的转向角,由于v2x应用层国标中规定了可以从整车总线上获得远车rv方向盘转角st
rv
,则远车rv车轮转向角其中,i
rv
为远车rv的转向传动比。
[0081]
同时,得到p
n
点基于gps坐标系(全局坐标系)的坐标:
[0082][0083]
其中:其中:为主车hv初始状态的速度矢量;为主车hv初始状态的加速度矢量;α
hv,0
为主车hv初始状态的转向角,由于 v2x应用层国标中规定了可以从整车总线上获得主车hv方向盘转角st
hv
,则主车hv车轮转向角其
中,i
hv
为主车hv的转向传动比。
[0084]
基于矢量法对于b
n
点、p
n
点的分析与车辆处于哪种类型的路径无关,因此可以根据远车rv处于主车hv的不同方位,结合rsu发送的局部地图信息,进行hv车辆换道过程中对于周围车辆是否有碰撞风险进行实时的计算。
[0085]
在换道过程中,需要考虑主车hv与周围的多个远车rv(如rv1、rv2、rv3、rv4)是否有碰撞危险,只有主车hv与周围远车rv都没有碰撞危险,主车hv 才能进行换道。因此主车hv与远车rv的安全距离模型为:
[0086]
当v
rv
>0时,
[0087][0088]
当v
rv
=0时,
[0089][0090]
其中,v
rel
为主车hv与远车rv的相对车速。
[0091]
若dcpa1≤d
w,1
,则认定主车hv与远车rv存在碰撞风险,即前向碰撞风险,并计算出碰撞时间t
warning
;否则,若dcpa1>d
w,1
,则认定主车hv与远车rv不存在碰撞风险。
[0092]
若n=3,在图3中,远车rv相对于主车hv的合速度为在n=1时,为 n=2时,为n=3时,为将分别投影到矢量分别投影到矢量上;由于与主车hv的车速矢量大小相等,方向相反。
[0093]
因此,在每一个时间间隔δ
t
内(设置δ
t
=1s)时,
[0094]
当v
rv
>0时,
[0095][0096]
当v
rv
=0时,
[0097][0098]
其中,为与的夹角;为与的夹角,为与的夹角。
[0099]
若
dcpa3
≤d
w,3
,则认定主车hv与远车rv存在碰撞风险,即前向碰撞风险,并计算出碰撞时间否则,若
dcpa3
>d
w,3
,则认定主车hv 与远车rv不存在碰撞风
险。
[0100]
以此类推,若在矢量计算的迭代总次数n内,在n=n时,在每一个时间间隔δ
t
内(设置δ
t
=1s)时,
[0101]
当v
rv
>0时
[0102][0103]
当v
rv
=0时
[0104][0105]
其中,为与的夹角;为与的夹角,为与的夹角。
[0106]
如果dcpa
n
≤d
w,n
,则停止迭代计算,此时可以得出主车hv在未来t
warning
时间后,与远车rv存在碰撞风险,即有前向碰撞风险;反之,则不存在碰撞风险。
[0107]
其中根据公式(5)(6)可知,第n次迭代计算时,
[0108][0109][0110][0111][0112]
[0113]
即若cosθ
n
≤0,则主车hv与远车rv之间不存在碰撞风险,若cosθ
n
>0,则主车hv与远车rv之间存在碰撞风险。
[0114]
可以理解的是,如图4所示,将当前远车rv通过坐标平移变换在主车hv 的局部坐标系中,得到当前远车rv处于主车hv的方位;其中,坐标变换如公式(21)所示:
[0115][0116]
其中,x
hv
表示主车质心在全局坐标下的横坐标值;x
rv
表示当前远车质心在全局坐标下的横坐标值;y
hv
表示主车质心在全局坐标下的纵坐标值;y
rv
表示当前远车质心在全局坐标下的纵坐标值;x
rv>hv
表示当前远车相对于主车在全局坐标下的横坐标值;y
rv>hv
表示当前远车相对于主车在全局坐标下的纵坐标值;θ为主车从全球导航卫星系统定位gnss上获得的罗盘角,以逆时针为正方向。
[0117]
因此,具体的远车rv相对于主车hv的方位为:
[0118][0119][0120]
步骤s2、所述主车若检测到与同车道前后向远车之中至少一个之间存在碰撞风险,则向主车驾驶员发出碰撞预警以及取消所述换道指令;
[0121]
具体过程为,若主车与同车道前向远车(即前方车辆)存在碰撞风险,则通过语音或表盘仪器亮红等方式向主车驾驶员发出碰撞预警以及取消换道指令;或者若主车与同车道后向远车(即后方车辆)存在碰撞风险,也通过语音或表盘仪器亮红等方式会向主车驾驶员发出碰撞预警以及取消换道指令。
[0122]
步骤s3、所述主车若检测到与同车道前后向远车之间均不存在碰撞风险,则根据所述换道指令及所述预设路侧单元发送的v2i信息,确定出变换车道及所述变换车道上的远车,且根据所述变换车道上所有远车发送的v2v信息,进一步对与所述变换车道上所有远车之间的碰撞风险进行检测,并待检测到与所述变换车道上至少一个远车之间存在碰撞风
险后,向主车驾驶员发出碰撞预警以及取消所述换道指令。
[0123]
具体过程为,首先,在接收到换道指令后,若主车与同车道前后向远车(即前方及后方车辆)不存在碰撞风险,则会根据换道指令及预设路侧单元发送的 v2i信息,识别出主车即将进入的变换车道及变换车道上正在行驶的所有远车。例如,主车驾驶员打开左转信号灯后,主车能识别出即将进入的变换车道为左车道,以及识别出左车道上正在行驶的所有远车。
[0124]
其次,根据变换车道上所有远车发送的v2v信息,对与变换车道上所有远车之间的碰撞风险进行检测。应当说明的是,变换车道上所有远车之间的碰撞风险检测与步骤s1中同车道前后向远车之间的碰撞风险检测的步骤相同,在此不再赘述。
[0125]
最后,若主车与变换车道上至少一个远车(如左前方车辆,即左车道前方车辆)存在碰撞风险,通过语音或表盘仪器亮红等方式向主车驾驶员发出碰撞预警以及取消换道指令。
[0126]
在本发明实施例中,在接收到换道指令后,若主车与同车道前后向远车之间以及与变换车道上所有远车之间均不存在碰撞风险,则可以让主车进行变道行驶,同时计算出主车的最优换道轨迹和换道时间,实现主车最佳路由行驶。因此,所述方法进一步包括:
[0127]
主车若检测到与同车道前后向远车之间以及与所述变换车道上所有远车之间均不存在碰撞风险后,则基于预设目标函数输出的期望目标来得到最优的换道轨迹和换道时间,并根据最优的换道轨迹和换道时间,实现换道行驶;其中,预设目标函数的期望目标为前轮转角最小和纵向车速最小,并基于5次多项式和遗传算法计算得到的。
[0128]
在一个实施例中,5次多项式换道轨迹表达式如下式(22),其中,纵向位移x(t)和横向位移y(t)分别关于时间t的函数:
[0129][0130]
其中,a0~a5为纵向位移轨迹待定系数,b0~b5为横向位移轨迹待定系数,初始状态和目标状态状态已知,那么即可求解出式(22)的待定系数。
[0131]
在换道初始和结束的时刻,汽车行驶状态应趋于稳定,不会产生加速度,也不会产生横向的速度,这样才能满足车辆运动学特性。
[0132]
因此,初始状态可表示为其中,v
xin
表示纵向初始状态速度;目标状态可以表示为其中,v
xfin
表示换道结束后的纵向速度;l为换道过程的纵向位移;h表示车道宽,一般取3.75m。
[0133]
设t=0时,开始换道且此时车辆质心位于坐标原点,t=t0时完成换道,带入公式(22)得:
[0134][0135][0136]
对式(22)求二阶和三阶导数,得到基于五次多项式的换道轨迹横纵向速加速度、横纵向加速度:
[0137][0138]
由式(23)、(24)代入式(25),求极值得到:
[0139][0140]
其中,a
mx
为轨迹纵向加速度的极大值;a
my
为轨迹横向加速度的极大值。
[0141]
由于车道宽h是已知的,v
xin
可以通过主车hv的can总线获得,因此加速度的极值只与v
xfin
、l和换道时间t0相关。因此换道轨迹评价指标j表示如下:
[0142][0143]
其中,a
max
代表车辆最大加速度;l
max
为换道纵向位移最大值;t
cmax
为换道时间最大值;w1、w2、w3为权重系数,三者的关系为:w1 w2 w3=1;l 表示换道的纵向位移,表示对交通
流的影响,其值越小,影响越小;t
c
表示换道的换道时间,表示换道效率,其值越小,换道效率越高。
[0144]
因此,基于遗传算法换道轨迹优化的问题转换为求目标函数最优解来描述,该目标函数具体如下:
[0145][0146]
将适应度函数带入遗传算法模块进行迭代寻优,可求得在j最小情况下对应的v
xfin
、l和t
c
,从而得到完整的边界条件,就能获得5次多项式的各个参数,最后得到最优的换道轨迹。
[0147]
目前研究也多关注于直道,缺乏对弯道换道轨迹规划模型的研究。因此,通过弯道换道与直道换道的分析对比,将弯道问题转化为直道问题,从而简化运算。
[0148]
弯道换道与直道换道不同,直道上从a车道换到b车道,可以看作是从b 车道换到a车道的镜像,计算方式完全相同。由于弯道上两个车道曲率存在差异,所以要分情况讨论,具体如下:
[0149]
(1)起始车道为外侧车道,目标车道为内侧车道
[0150]
为了研究弯道换道轨迹规划模型,通过弯道换道与直道换道的分析对比,将弯道问题转化为直道问题,以简化运算.智能汽车弯道换道过程如图7所示,其中,弯曲路段可近似成圆弧路段,s1和s2分别为起始车道和目标车道的中心线,θ为路段起始边界线与结束边界线的夹角,h为起始车道和目标车道相同的曲率,r为起始车道的曲率半径,所以目标车道的曲率半径为r
‑
h.以换道开始时刻的质心o为原点建立坐标系,换道结束时刻汽车的质心为f.整个换道过程为在点o和点f之间寻找一条光滑的曲线,即为弯道换道轨迹。
[0151]
采用5次多项式的方法对此换道轨迹进行描述,与直道相比,最大的区别是在换道结束时刻的状态量(速度、加速度等信息)都以本身为参照物给出,而建立的坐标系是以规划开始时刻汽车的质心为原点,所以要进行坐标的转化,目的是将换道结束时刻汽车状态量的数值转化成图5中oxy坐标系下对应的数值,则有:
[0152][0153]
x
fin
=(r
‑
h)sinθ
ꢀꢀꢀ
(30);
[0154][0155][0156]
y
fin
=r
‑
(r
‑
h)cosθ
ꢀꢀꢀ
(33);
[0157]
[0158][0159]
结合公式(29)~(35)即为目标状态量的坐标转换过程,由此得到在oxy 坐标下的初始状态和目标状态的数值,在弯道的求解方式和直道换道相同。
[0160]
(2)起始车道为内侧车道,目标车道为外侧车道
[0161]
智能汽车在弯道由内侧向外侧换道的过程如图6所示,s1和s2分别为起始车道和目标车道的中心线。路段起始边界线与结束边界线的夹角为α。起始车道和目标车道具有相同的曲率圆心h。与上一种情况不同的是,若设起始车道的曲率半径为r,由于车道宽为h,那么目标车道的曲率半径为r h。以换道开始时刻的质心o为原点建立坐标系,换道结束时刻汽车的质心为f。整个换道过程可表达为在点o和点f之间寻找一条光滑的曲线,即为弯道换道轨迹。
[0162]
同理,以规划开始时刻汽车的质心为原点,所以要进行坐标的转化,目的是将换道结束时刻汽车状态量的数值转化成oxy坐标系下对应的数值。则转换公式为:
[0163]
x
fin
=(r h)sinα
ꢀꢀꢀ
(36);
[0164]
x
fin
=v
xfin cosα v
yfin sinα
ꢀꢀꢀ
(37);
[0165][0166]
y
fin
=r
‑
(r h)cosα
ꢀꢀꢀ
(39);
[0167]
y
fin
=v
xfin sinα
‑
v
yfin cosα
ꢀꢀꢀ
(40);
[0168][0169]
结合公式(36)~(41)即为目标状态量的坐标转换过程,由此得到在oxy 坐标下的初始状态和目标状态的数值,在弯道的求解方式和直道换道相同。
[0170]
如图7所示,为本发明实施例中,提供的一种车辆换道碰撞预警装置,其在道路行驶过程中通过c
‑
v2x技术对多个远车均进行实时监测的主车上实现,包括同车道碰撞风险检测单元110、换道前碰撞预警单元120和换道中碰撞预警单元130;其中,
[0171]
所述同车道碰撞风险检测单元110,用于所述主车待接收到主车驾驶员的换道指令后,根据行驶道路周边预设路侧单元发送的v2i信息以及同车道上所有远车发送的v2v信息,对与同车道前后向远车之间的碰撞风险进行检测;
[0172]
换道前碰撞预警单元120,用于所述主车若检测到与同车道前后向远车之中至少一个之间存在碰撞风险,则向主车驾驶员发出碰撞预警以及取消所述换道指令;
[0173]
换道中碰撞预警单元130,用于所述主车若检测到与同车道前后向远车之间均不存在碰撞风险,则根据所述换道指令及所述预设路侧单元发送的v2i信息,确定出变换车道及所述变换车道上的远车,且根据所述变换车道上所有远车发送的v2v信息,进一步对与所
述变换车道上所有远车之间的碰撞风险进行检测,并待检测到与所述变换车道上至少一个远车之间存在碰撞风险后,向主车驾驶员发出碰撞预警以及取消所述换道指令。
[0174]
其中,还包括:换道路径优化单元140;其中,
[0175]
所述换道路径优化单元140,用于所述主车若检测到与同车道前后向远车之间以及与所述变换车道上所有远车之间均不存在碰撞风险后,则基于预设目标函数输出的期望目标来得到最优的换道轨迹和换道时间,并根据所述最优的换道轨迹和换道时间,实现换道行驶。
[0176]
其中,所述换道指令是通过识别主车方向盘的转动方向及其转动角度超过预定角度来获得的,和/或通过识别主车转向灯开启方向来获得的。
[0177]
实施本发明实施例,具有如下有益效果:
[0178]
1、本发明基于c
‑
v2x技术并结合路测单元rsu(road side unit)提供的 v2i信息,对各种道路行驶状况下与所有远车之间的碰撞风险进行实时监测,且在同车道前后向远车及变换车道上所有远车之间存在碰撞风险情况下,发出碰撞预警并取消换道指令,从而实现对各种道路形状下车辆换道的碰撞进行预警,大大提高了车辆换道的安全性和实用性;
[0179]
2、本发明对车辆的识别受天气等因素影响较小,只依赖于车辆状态数据而不依赖于道路曲率信息,从而提高了行车安全性与舒适性。
[0180]
值得注意的是,上述装置实施例中,所包括的各个功能单元模块只是按照功能逻辑进行划分的,但并不局限于上述的划分,只要能够实现相应的功能即可;另外,各功能单元模块的具体名称也只是为了便于相互区分,并不用于限制本发明的保护范围。
[0181]
本领域普通技术人员可以理解实现上述实施例方法中的全部或部分步骤是可以通过程序来指令相关的硬件来完成,所述的程序可以存储于一计算机可读取存储介质中,所述的存储介质,如rom/ram、磁盘、光盘等。
[0182]
以上所揭露的仅为本发明较佳实施例而已,当然不能以此来限定本发明之权利范围,因此依本发明权利要求所作的等同变化,仍属本发明所涵盖的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。