技术特征:
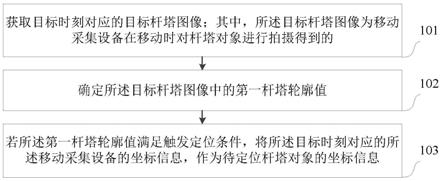
1.一种基于电力杆塔的定位方法,其特征在于,所述方法包括:获取目标时刻对应的目标杆塔图像;其中,所述目标杆塔图像为移动采集设备在移动时对杆塔对象进行拍摄得到的;确定所述目标杆塔图像中的第一杆塔轮廓值;若所述第一杆塔轮廓值满足触发定位条件,将所述目标时刻对应的所述移动采集设备的坐标信息,作为待定位杆塔对象的坐标信息。2.根据权利要求1所述的方法,其特征在于,在所述获取目标时刻对应的目标杆塔图像的步骤之前,所述方法还包括:根据历史时刻对应的历史杆塔图像,确定待定位杆塔对象;其中,所述历史时刻为所述目标时刻的上一时间点时刻。3.根据权利要求2所述的方法,其特征在于,所述根据历史时刻对应的历史杆塔图像,确定待定位杆塔对象,包括:获取历史时刻对应的历史杆塔图像;确定所述历史杆塔图像中的参照杆塔轮廓值;每一杆塔轮廓值对应一杆塔对象;将所述参照杆塔轮廓值对应的杆塔对象,作为待定位杆塔对象。4.根据权利要求3所述的方法,其特征在于,所述确定所述历史杆塔图像中的参照杆塔轮廓值,包括:从所述历史杆塔图像的一个或多个杆塔轮廓值中,确定最大的杆塔轮廓值,作为所述参照杆塔轮廓值。5.根据权利要求1所述的方法,其特征在于,在所述确定所述目标杆塔图像中的第一杆塔轮廓值的步骤之前,所述方法还包括:对所述目标杆塔图像进行图像识别;在识别到所述目标杆塔图像中存在一个或多个杆塔对象时,执行所述确定所述目标杆塔图像中的第一杆塔轮廓值的步骤。6.根据权利要求1所述的方法,其特征在于,所述确定所述目标杆塔图像中的第一杆塔轮廓值,包括:获取所述目标杆塔图像中的一个或多个杆塔对象各自对应的杆塔轮廓值;从所述一个或多个杆塔对象各自对应的杆塔轮廓值中,确定最大的杆塔轮廓值,作为所述第一杆塔轮廓值。7.根据权利要求1至6任意一项所述的方法,其特征在于,在所述确定所述目标杆塔图像中的第一杆塔轮廓值的步骤之后,所述方法还包括:判断所述第一杆塔轮廓值是否满足触发定位条件;在所述第一杆塔轮廓值小于参照杆塔轮廓值时,判定所述第一杆塔轮廓值满足触发定位条件;所述方法还包括:若所述第一杆塔轮廓值未满足触发定位条件,将所述第一杆塔轮廓值作为所述参照杆塔轮廓值。8.一种基于电力杆塔的定位装置,其特征在于,所述装置包括:目标杆塔图像获取模块,用于获取目标时刻对应的目标杆塔图像;其中,所述目标杆塔
图像为移动采集设备在移动时对杆塔对象进行拍摄得到的;第一杆塔轮廓值确定模块,用于确定所述目标杆塔图像中的第一杆塔轮廓值;杆塔定位模块,用于若所述第一杆塔轮廓值满足触发定位条件,将所述目标时刻对应的所述移动采集设备的坐标信息,作为待定位杆塔对象的坐标信息。9.一种计算机设备,包括存储器和处理器,所述存储器存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求1至7中任一项所述的基于电力杆塔的定位方法的步骤。10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求1至7中任一项所述的基于电力杆塔的定位方法的步骤。
技术总结
本申请涉及基于电力杆塔的定位方法、装置、计算机设备和存储介质。所述方法包括:获取目标时刻对应的目标杆塔图像;其中,所述目标杆塔图像为移动采集设备在移动时对杆塔对象进行拍摄得到的;确定所述目标杆塔图像中的第一杆塔轮廓值;若所述第一杆塔轮廓值满足触发定位条件,将所述目标时刻对应的所述移动采集设备的坐标信息,作为待定位杆塔对象的坐标信息。采用本方法能够实现低成本且可行性强的定位中低压电力杆塔,通过移动采集设备获取目标杆塔图像,进而基于目标杆塔图像中的杆塔轮廓值判定对待定位杆塔对象的触发定位条件,以确定待定位杆塔对象的坐标信息,从而极大降低了获取海量中低压电力杆塔的定位坐标的成本,提升了时效性。升了时效性。升了时效性。
技术研发人员:张倩 范庆玉 马明锐 黄天龙 李华林 蔡振文 陈启鹏
受保护的技术使用者:广州粤能电力科技开发有限公司
技术研发日:2021.07.13
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。