1.本发明涉及医疗外科手术的辅助操作器械技术领域,具体而言,涉及一种微创脊柱手术辅助机器人。
背景技术:
2.伴随着全球人口向老龄化现象转变以及人们现代化出行方式的改变,脊柱腰椎退行性疾病、骨折等脊柱类疾病患者逐年增多。传统的开放式手术为了能准确的把椎弓根螺钉植入人体,需要在患者背部剥离脊柱椎弓根周围的肌肉组织。一方面会导致患者创伤较大且术后恢复时间较长,术中应用的自动撑开器会使得术后并发症严重,另一方面,由于人手部的天然颤抖、医生长时间进行手术之后的疲劳、以及病人呼吸导致的肢体运动,使得实际手术过程中椎弓根钉植入的精度往往难以保证,因此,手术效果很大程度上依赖于医生的技术和一些偶然因素。
技术实现要素:
3.本发明旨在提出一种微创脊柱手术辅助机器人,以解决现有微创脊柱手术存在的定位精度低、操作准确度差的技术问题。
4.为达到上述目的,本发明的技术方案是这样的:
5.一种微创脊柱手术辅助机器人,包括依次连接的第一直线驱动组件、第二直线驱动组件、摆臂及末端执行器,所述第一直线驱动组件适于移动设置于手术床上,所述第二直线驱动组件与所述第一直线驱动组件在所述手术床的宽度方向上滑动连接,且所述第二直线驱动组件与所述摆臂的一端转动连接,所述摆臂的另一端与所述末端执行器的一端转动连接,所述末端执行器的另一端适于与手术器械安装座摆动连接。
6.本发明所述的微创脊柱手术辅助机器人,通过依次连接的第一直线驱动组件、第二直线驱动组件、摆臂以及末端执行器与手术器械安装座连接,手术器械安装座也即椎弓根钉植入通道,通过控制手术器械安装座的轴线位置以达到控制椎弓根钉植入精度的目的。具体地,第一直线驱动组件沿手术床高度方向的移动结合摆臂的转动以实现带动末端执行器沿手术床的长度方向移动,通过第二直线驱动组件驱动摆臂沿手术床的宽度方向(也即脊柱宽度方向)移动,使得摆臂带动末端执行器在手术床的宽度方向上来回移动,以调整椎弓根钉的植入位置,从而控制手术器械安装座在两个方向上的直线移动;通过末端执行器的摆动以实现控制手术器械安装座在椎弓根钉植入方向上的摆动,实现了手术器械安装座移动自由度与转动自由度的组合,手术器械安装座的多自由度调节,以确保手术的精确定位及精准操作。
7.可选地,所述第一直线驱动组件包括单轴驱动器、第一伺服电机及第一连接件,所述单轴驱动器的一端与所述第一伺服电机连接,所述单轴驱动器的另一端通过所述第一连接件与所述第二直线驱动组件滑动连接,所述单轴驱动器的第一滑块适于与所述手术床连接。
8.可选地,该微创脊柱手术辅助机器人还包括夹持机构,所述夹持机构设置在所述第一直线驱动组件的第一滑块上,所述第一直线驱动组件与所述夹持机构在所述手术床的高度方向上滑动连接,所述夹持机构适于夹持在所述手术床上。
9.可选地,所述夹持机构包括支架、夹紧旋钮、压块、上导向轮、下导向轮及导向轮位置调整旋钮,所述支架上在靠近所述手术床一侧设有第一安装槽,所述第一安装槽内设有所述上导向轮、所述下导向轮,所述上导向轮与所述下导向轮之间形成适于卡紧所述手术床的安装空间,所述导向轮位置调整旋钮与所述下导向轮连接,所述导向轮位置调整旋钮适于调整所述上导向轮与所述下导向轮之间的距离,所述夹紧旋钮位于所述支架远离所述手术床的一侧,所述夹紧旋钮与所述压块连接,所述夹紧旋钮适于旋转以推动所述压块压紧所述手术床。
10.可选地,所述夹持机构还包括第一转轴、第二转轴、第一轴承及第二轴承,所述第一转轴穿过所述上导向轮并通过所述第一轴承与所述支架连接;所述第二转轴穿过所述下导向轮并通过所述第二轴承与所述支架连接。
11.可选地,所述摆臂包括臂杆、转动轴、第四伺服电机及第二谐波减速器,所述臂杆的一端通过所述转动轴与所述第二直线驱动组件转动连接,所述臂杆的另一端与所述末端执行器转动连接,所述第二谐波减速器和所述第四伺服电机位于所述臂杆的异侧并分别与所述转动轴的两端连接,所述第四伺服电机适于驱动所述臂杆绕所述转动轴转动。
12.可选地,所述末端执行器包括旋转关节、摆动关节、后端盖、前端盖及套筒,所述后端盖和所述前端盖分别设置在所述套筒的两端,所述旋转关节及所述摆动关节至少部分位于所述套筒内,所述旋转关节适于穿过所述后端盖与所述摆臂转动连接,所述摆动关节适于穿过所述前端盖与所述手术器械安装座摆动连接。
13.可选地,所述旋转关节包括第二伺服电机、第一齿轮组及第一谐波减速器,所述第二伺服电机设于所述套筒内,所述第二伺服电机通过所述第一齿轮组与所述第一谐波减速器驱动连接,所述第一齿轮组与所述后端盖连接,所述第一谐波减速器设置在所述臂杆一端的第二安装槽内,所述第二伺服电机适于驱动所述第一谐波减速器以带动所述套筒绕其轴线转动。
14.可选地,所述摆动关节包括第三伺服电机、第二齿轮组、滚珠丝杠传动副、第二连接件、导杆及铰链结构,所述第三伺服电机设于所述套筒内,所述第三伺服电机通过所述第二齿轮组与所述滚珠丝杠传动副驱动连接,所述滚珠丝杠传动副与所述前端盖连接,所述滚珠丝杠传动副通过所述第二连接件与所述导杆的一端连接,所述导杆的另一端适于穿过所述前端盖并通过所述铰链结构与所述手术器械安装座连接,所述第三伺服电机通过所述滚珠丝杠传动副驱动所述第二连接件沿所述滚珠丝杠传动副的轴线方向平移。
15.可选地,所述铰链结构包括第一铰接轴、第二铰接轴、第一连接块、第二连接块及第三铰接轴,所述导杆在远离所述第二连接件的一端通过所述第一铰接轴与所述第一连接块连接,所述第一连接块通过所述第二铰接轴与所述手术器械安装座的一端铰接;所述第二连接块安装在所述前端盖上,所述第二连接块通过所述第三铰接轴与所述手术器械安装座的另一端铰接;所述第三伺服电机通过所述滚珠丝杠传动副驱动所述第二连接件和所述导杆移动以带动所述手术器械安装座绕所述第三铰接轴转动。
附图说明
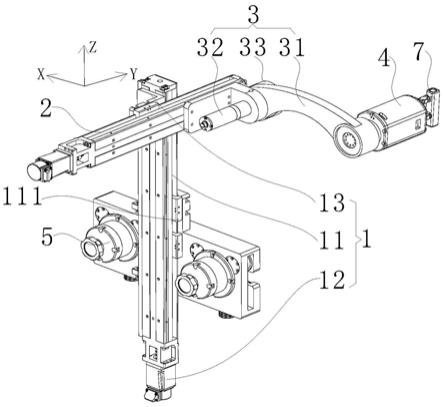
16.图1为本发明实施例的微创脊柱手术辅助机器人使用时的结构示意图;
17.图2为本发明实施例的微创脊柱手术辅助机器人的结构示意图;
18.图3为本发明实施例的夹持机构的结构示意图;
19.图4为本发明实施例的夹持机构的另一视角的结构示意图;
20.图5为图4的剖视图;
21.图6为图5中a处的放大示意图;
22.图7为图4另一断面的剖视图;
23.图8为图7中b处的放大示意图;
24.图9为本发明实施例的臂杆的结构示意图;
25.图10为本发明实施例的末端执行器的外部结构示意图;
26.图11为本发明实施例的末端执行器的内部结构示意图;
27.图12为图10的剖视图;
28.图13为图12中c处的放大示意图。
29.附图标记说明:
30.1、第一直线驱动组件;11、单轴驱动器;111、第一滑块;12、第一伺服电机;13、第一连接件;2、第二直线驱动组件;3、摆臂;31、臂杆;311、钢珠;312、第二安装槽;313、第三安装槽;32、第四伺服电机;33、第二谐波减速器;4、末端执行器;41、旋转关节;411、第二伺服电机;412、第一齿轮组;413、第一谐波减速器;414、减速器连接机构;4141、法兰轴;4142、第三轴承;4143、法兰;4144、第三垫圈;4145、锁紧螺母;42、摆动关节;421、第三伺服电机;422、第二齿轮组;423、滚珠丝杠传动副;424、第二连接件;425、导杆;426、铰链结构;4261、第一铰接轴;4262、第二铰接轴;4263、第一连接块;4264、第二连接块;4265、第三铰接轴;43、后端盖;44、前端盖;45、套筒;5、夹持机构;51、支架;52、夹紧旋钮;53、压块;54、上导向轮;55、下导向轮;56、导向轮位置调整旋钮;57、第一转轴;58、第二转轴;59、第一轴承;510、第二轴承;511、滑块;512、导轨;513、第一垫圈;514、扣环;515、端盖;516、第二垫圈;517、螺钉;6、手术床;7、手术器械安装座。
具体实施方式
31.为使本发明的上述目的、特征和优点能够更为明显易懂,下面结合附图对本发明的具体实施例做详细的说明。
32.在本发明的描述中,应当说明的是,各实施例中的术语名词例如“上”、“下”、“前”、“后”等指示方位的词语,只是为了简化描述基于说明书附图的位置关系,并不代表所指的元件和装置等必须按照说明书中特定的方位和限定的操作及方法、构造进行操作,该类方位名词不构成对本发明的限制。
33.本文中设置有坐标系xyz,其中x轴的正向代表左方向,x轴的反向代表右方向,y轴的正向代表前方向,y轴的反向代表后方向,z轴的正向代表上方,z轴的反向代表下方。
34.如图1
‑
2、11
‑
12所示,本发明实施例的微创脊柱手术辅助机器人包括依次连接的第一直线驱动组件1、第二直线驱动组件2、摆臂3及末端执行器4,所述第一直线驱动组件1适于移动设置于手术床6上,所述第二直线驱动组件2与所述第一直线驱动组件1在所述手
术床6的宽度方向上滑动连接,且所述第二直线驱动组件2与所述摆臂3的一端转动连接,所述摆臂3的另一端与所述末端执行器4的一端转动连接,所述末端执行器4的另一端适于与手术器械安装座7摆动连接。
35.在本实施例中,所述第一直线驱动组件1沿z轴所示方向设置,所述第二直线驱动组件沿y轴所示方向设置,所述手术床6的长度方向即为x轴所示方向。
36.手术床6的侧边设有把手,所述第一直线驱动组件1与把手连接,所述第一直线驱动组件1适于相对所述手术床6上下移动所述上下方向即为z轴所示方向,所述第一直线驱动组件1的上方垂直连接有第二直线驱动组件2,所述第二直线驱动组件2适于相对所述第一直线驱动组件1前后移动,也即沿手术床6或脊柱的宽度方向移动y轴所示方向以带动所述摆臂3及末端执行器4移动至合适位置。所述摆臂3整体绕y轴转动,根据规划的钉道位姿进行运动学解算,分析微创脊柱手术辅助机器人各个关节的运动量,驱动控制各关节,以将所述手术器械安装座7摆放至规划的钉道位姿,完成手术辅助过程。
37.整个手术过程中,第一直线驱动组件1竖向(沿z轴所示方向)升降及摆臂3绕y轴摆动以控制手术器械安装座7沿手术床长度方向(也即x轴所示方向)移动,第二直线驱动组件2驱动摆臂3沿手术床宽度方向也即脊柱宽度方向来回移动,使得摆臂3带动末端执行器4在手术床的宽度方向上来回移动,以调整椎弓根钉的植入位置,从而控制手术器械安装座7在两个方向上的直线移动;通过末端执行器4的摆动以实现控制手术器械安装座7在椎弓根钉植入方向上的摆动,实现了手术器械安装座移动自由度与转动自由度的组合,手术器械安装座的多自由度调节,以确保手术的精确定位及精准操作。
38.如图2所示,可选地,所述第一直线驱动组件1包括单轴驱动器11、第一伺服电机12及第一连接件13,所述单轴驱动器11的一端与所述第一伺服电机12连接,所述单轴驱动器11的另一端通过所述第一连接件13与所述第二直线驱动组件2滑动连接,所述单轴驱动器11的第一滑块111适于与所述手术床6连接。
39.在本实施例中,所述单轴驱动器11沿z轴所示方向设置,所述单轴驱动器11的下端下方即为z轴反向所指方向安装有第一伺服电机12,所述单轴驱动器11的上端通过l型的第一连接件13与第二直线驱动组件2滑动连接,所述单轴驱动器11丝杆转动转化成第一滑块111沿z轴的上下移动,为了提高手术床6与第一滑块111之间的连接稳固性,可采用双第一滑块111或多第一滑块形式。所述第二直线驱动组件2与所述第一直线驱动组件1的结构类似,在此不再赘述。
40.如图1
‑
2所示,可选地,该微创脊柱手术辅助机器人还包括夹持机构5,所述夹持机构5设置在所述第一直线驱动组件1的第一滑块111上,所述第一直线驱动组件1与所述夹持机构5在所述手术床6的高度方向上滑动连接,所述夹持机构5适于夹持在所述手术床6上。
41.在本实施例中,为了方便实现单轴驱动器11的第一滑块111与手术床6之间的安装,可在所述第一滑块111上安装一夹持机构5,夹持机构5要能实现与手术床6之间的锁紧与松开,使用方便。
42.所述夹持机构5沿手术床6的长度方向设置,也即x轴所示方向设置,所述夹持机构5适于跟随所述第一滑块111在z轴所示方向上下移动。
43.如图3
‑
4所示,可选地,所述夹持机构5包括支架51、夹紧旋钮52、压块53、上导向轮54、下导向轮55及导向轮位置调整旋钮56,所述支架51上在靠近所述手术床6一侧设有第一
安装槽,所述第一安装槽内设有所述上导向轮54、所述下导向轮55,所述上导向轮54与所述下导向轮55之间形成适于卡紧所述手术床6的安装空间,所述导向轮位置调整旋钮56与所述下导向轮55连接,所述导向轮位置调整旋钮56适于调整所述上导向轮54与所述下导向轮55之间的距离,所述夹紧旋钮52位于所述支架51远离所述手术床6的一侧,所述夹紧旋钮52与所述压块53连接,所述夹紧旋钮52适于旋转以推动所述压块53压紧所述手术床6。
44.在本实施例中,所述支架51呈倒置的t字型,所述支架51可通过螺栓与所述单轴驱动器11的两个第一滑块111固定连接。所述支架51在靠近所述手术床6的一侧设有第一安装槽,所述第一安装槽呈c型槽,所述第一安装槽内设有上下相对设置的上导向轮54和下导向轮55,所述上导向轮54和所述下导向轮55可设置多组,所述下导向轮55可通过第二滑块511与竖向设置在支架51上导轨512滑动连接,所述下导向轮55的底部连接有所述导向轮位置调整旋钮56,旋转所述导向轮位置调整旋钮56以推动所述下导向轮55在z轴方向上移动,调整上导向轮54和下导向轮55之间的距离,以夹紧在所述手术床6上。
45.所述支架51在远离所述手术床6的一侧设有夹紧旋钮52,所述夹紧旋钮52沿y轴所示方向设置,所述夹紧旋钮52可设置多个,所述夹紧旋钮52垂沿垂直所述第一安装槽方向设置,所述夹紧旋钮52在靠近手术床6的一端安装有压块53,旋转所述夹紧旋钮52使得所述压块53与所述手术床6压紧。
46.所述夹持机构5从z轴方向和y轴方向同时实现对所述手术床6的夹紧,夹持稳定性好。
47.如图5
‑
8所示,可选地,所述夹持机构5还包括第一转轴57、第二转轴58、第一轴承59及第二轴承510,所述第一转轴57穿过所述上导向轮54并通过所述第一轴承59与所述支架51连接;所述第二转轴58穿过所述下导向轮55并通过所述第二轴承510与所述支架51连接。
48.在本实施例中,所述第一转轴57、所述第二转轴58沿y轴所示方向设置,所述第一转轴57轴向穿过所述上导向轮54,所述第一转轴57通过所述第一轴承59与所述支架51转动连接,所述第一转轴57的端部设有端盖515,所述上导向轮54与所述第一轴承59之间设有第一垫圈513,保护上导向轮54避免磨损,所述第一轴承59与所述端盖之间设有扣环514,可实现对上导向轮54的快速安装,固定及支承。
49.所述第二转轴58穿过所述下导向轮55以固定在所述支架51上,所述第二转轴58与所述下导向轮55之间通过所述第二轴承510实现转动连接,所述第二轴承510的内圈通过第二垫圈516、螺钉517固定在所述第二转轴58上,以实现对所述下导向轮55的支承。
50.可选地,所述摆臂3包括臂杆31、转动轴、第四伺服电机32及第二谐波减速器33,所述臂杆31的一端通过所述转动轴与所述第二直线驱动组件2转动连接,所述臂杆31的另一端与所述末端执行器4转动连接,所述第二谐波减速器33和所述第四伺服电机32位于所述臂杆31的异侧并分别与所述转动轴的两端连接,所述第四伺服电机32适于驱动所述臂杆31绕所述转动轴转动。
51.在本实施例中,为了避免手术操作的工程中,臂杆31与患者身体发生碰撞干涉,将所述臂杆31设置成朝向所述手术床6一侧弯曲(也即朝z轴负向所示方向弯曲)的拱形结构如图9所示,以避让患者身体,同时拱形结构也能起到增加刚度的作用。
52.所述臂杆31与所述第二直线驱动组件2通过转动轴沿y轴所示方向设置转动连接,
所述转动轴处通过第二谐波减速器33连接第四伺服电机32,所述第四伺服电机32驱动所述臂杆31绕y轴转动,所述第一直线驱动组件1沿竖直方向也即z轴所示方向移动,二者共同作用以带动所述手术器械安装座7上下移动以及在手术床长度方向上的移动。
53.所述臂杆31的两端分别设有用于安装第一谐波减速器413、第二谐波减速器33的第二安装槽312、第三安装槽313。
54.所述臂杆31采用非金属材料,优选碳纤维,所述臂杆31上安装有钢珠311也即靶球点,使得c型x光机能够获取椎弓根钉道的位置。
55.如图10所示,可选地,所述末端执行器4包括旋转关节41、摆动关节42、后端盖43、前端盖44及套筒45,所述后端盖43和所述前端盖44分别设置在所述套筒45的两端,所述旋转关节41及所述摆动关节42至少部分位于所述套筒45内,所述旋转关节41适于穿过所述后端盖43与所述摆臂3转动连接,所述摆动关节42适于穿过所述前端盖44与所述手术器械安装座7摆动连接。
56.在本实施例中,所述套筒45与其两端设置的后端盖43、前端盖44固定连接以构成所述末端执行器4的外壳部分,所述后端盖43通过所述旋转关节41与所述摆臂3的一端连接,所述前端盖44通过所述摆动关节42与所述手术器械安装座7连接。
57.一般地,所述旋转关节41及所述摆动关节42的驱动部分安装在所述套筒45内,所述旋转关节41及所述摆动关节42的传动部分伸出所述套筒45之外。所述旋转关节41绕其自身轴线转动,所述摆动关节42带动手术器械沿手术床前后摆动至患者脊柱附近适当位置即靶球点在x光机扫描视野范围内。
58.如图11
‑
12所示,可选地,所述旋转关节41包括第二伺服电机411、第一齿轮组412及第一谐波减速器413,所述第二伺服电机411设于所述套筒45内,所述第二伺服电机411通过所述第一齿轮组412与所述第一谐波减速器413驱动连接,所述第一齿轮组412与所述后端盖43连接,所述第一谐波减速器413设置在所述臂杆31一端的第二安装槽312内,所述第二伺服电机411适于驱动所述第一谐波减速器413以带动所述套筒45绕其轴线转动。
59.在本实施例中,所述第一谐波减速器413通过减速器连接机构414与后端盖43连接,如图13所示,减速器连接机构414包括法兰轴4141、第三轴承4142、法兰4143、第三垫圈4144、锁紧螺母4145,所述第一谐波减速器413的波发生器连接法兰轴4141,所述法兰轴4141通过第三轴承4142与所述后端盖43连接,所述第三轴承4142的内圈通过法兰4143、第三垫圈4144、锁紧螺母4145固定在后端盖43上,以实现对所述第一谐波减速器413的支承固定。所述法兰轴4141在远离所述第一谐波减速器413的一端安装有所述第一齿轮组412。所述第二伺服电机411沿y轴所示方向转动,所述第二伺服电机411驱动所述第一齿轮组412转动,所述第一齿轮组412通过所述第一谐波减速器413以带动所述末端执行器4整体绕自身所在轴线转动。
60.如图11
‑
12所示,可选地,所述摆动关节42包括第三伺服电机421、第二齿轮组422、滚珠丝杠传动副423、第二连接件424、导杆425及铰链结构426,所述第三伺服电机421设于所述套筒45内,所述第三伺服电机421通过所述第二齿轮组422与所述滚珠丝杠传动副423驱动连接,所述滚珠丝杠传动副423与所述前端盖44连接,所述滚珠丝杠传动副423通过所述第二连接件424与所述导杆425的一端连接,所述导杆425的另一端适于穿过所述前端盖44并通过所述铰链结构426与所述手术器械安装座7连接,所述第三伺服电机421通过所述
滚珠丝杠传动副423驱动所述第二连接件424沿所述滚珠丝杠传动副423的轴线方向平移。
61.在本实施例中,所述第三伺服电机421设于所述套筒45内部,所述第三伺服电机421的轴线与所述第二伺服电机411的轴线均沿y轴所示方向,所述第三伺服电机421绕y轴旋转,所述第三伺服电机421通过所述第二齿轮组422驱动所述滚珠丝杠传动副423运动,所述滚珠丝杠传动副423将所述第三伺服电机421的回转运动变为直线运动,所述滚珠丝杠传动副423的另一端与所述前端盖44固定连接,所述滚珠丝杠传动副423还通过所述第二连接件424与所述导杆425连接,所述第二连接件424与所述导杆425转动连接,所述导杆425、所述滚珠丝杠传动副423沿y轴所示方向设置,所述导杆425的另一端通过所述铰链结构426与所述手术器械安装座7连接,所述滚珠丝杠传动副423的传动带动所述导杆425、铰链结构426沿y轴移动,以实现手术器械安装座7的前后摆动。
62.可选地,所述铰链结构426包括第一铰接轴4261、第二铰接轴4262、第一连接块4263、第二连接块4264及第三铰接轴4265,所述导杆425在远离所述第二连接件424的一端通过所述第一铰接轴4261与所述第一连接块4263连接,所述第一连接块4263通过所述第二铰接轴4262与所述手术器械安装座7的一端铰接;所述第二连接块4264安装在所述前端盖44上,所述第二连接块4264通过所述第三铰接轴4265与所述手术器械安装座7的另一端铰接;所述第三伺服电机421通过所述滚珠丝杠传动副423驱动所述第二连接件424和所述导杆425移动以带动所述手术器械安装座7绕所述第三铰接轴4265转动。
63.在本实施例中,所述第二连接块4264呈l型,所述第二连接块4264的一端与所述前端盖44固定,所述第二连接块4264的另一端通过所述第三铰接轴4265与手术器械安装座7(手术器械安装座7适于安装所述手术器械安装座7内)的下部铰接。所述第一连接块4263的一端通过所述第一铰接轴4261与所述导杆425的一端铰接,所述第一连接块4263的另一端通过所述第二铰接轴4262与所述手术器械安装座7的上部铰接,在所述滚珠丝杠传动副423驱动所述导杆425沿y轴移动时,所述手术器械安装座7(包括其内安装的手术器械)绕第三铰接轴4265前后摆动。所述摆动关节42的前后摆动配合所述旋转关节41的自身旋转,可实现任意角度方向的摆动。
64.虽然本公开披露如上,但本公开的保护范围并非仅限于此。本领域技术人员在不脱离本公开的精神和范围的前提下,可进行各种变更与修改,这些变更与修改均将落入本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。