1.本发明属于电动执行元器件设计和制造技术领域,特别涉及一体化通用型直线作动器及其制造工艺。
背景技术:
2.直线作动器是将电能转化为机械能,能够输出直线往复运动的机电一体化装置,是广泛应用于国防军工、航空航天、交通运输、工农生产等领域的重要工业装备。电动直线作动器相比传统的气动伺服机构与液压伺服机构,具有功率密度大、动态响应快、运动精度高、紧凑轻巧、操作方便等突出优点,逐渐成为成熟主流的伺服运动执行机构。
3.直线作动器作为实现精准直线往复运动的执行机构,主要通过传动系统将电机的旋转运动转化为丝杠推杆的直线运动,一般由电动机、减速齿轮、丝杠螺母副组合而成。目前,直线作动器主要有减速型和直驱型两种结构形式。减速型直线作动器一般首先通过齿轮副来传递电机输出的旋转运动,之后再通过丝杠螺母副将旋转运动转换为直线往复运动,这种方式使整机的尺寸和重量都偏大,动态响应也很低;直驱型直线作动器一般通过键、花键或销将电机的旋转运动传递至丝杠,之后再通过丝杠螺母副将旋转运动转化为直线往复运动,这种方式增加了机构间隙和累计误差,也使得整体刚性较差。另外,当直线作动器在较大负载、快速动态、较长时间状态下工作服役时,很容易产生交变应力和机械磨损,最终导致运行卡死等失效问题。
4.因此,有必要发明一种集成度较高的一体化通用机构,解决目前减速型直线作动器及直驱型直线作动器存在的问题。
技术实现要素:
5.为了克服现有技术中的不足,本发明人进行了锐意研究,提供了一体化通用型直线作动器及其制造工艺,以实现直线作动器输出精准的直线往复动作,并使其研制工艺具有可行性。该装置结构形式具有通用性强,一体化集成,研制工艺简单等优势,能够承载较大推力、运动灵活、响应迅速、可靠稳定、使用简便,解决了减速型直线作动器存在的尺寸和重量偏大、动态响应低的问题,以及直驱型直线作动器存在的机构间隙和累计误差较大、整体刚性较差的问题,能够广泛应用于直线作动器产品的直线动作功能需求中。
6.本发明提供的技术方案如下:
7.第一方面,一体化通用型直线作动器,所述直线作动器包括中空型电机、传动
‑
动作模块、位移传感器、机
‑
电联动锁紧装置和驱动控制系统;
8.所述中空型电机与传动
‑
动作模块通过丝杠螺母副连接,使中空型电机的旋转运动直接转化为传动
‑
动作模块的直线往复运动,所述位移传感器与传动
‑
动作模块通过机
‑
电联动锁紧装置连接,并向驱动控制系统输出传动
‑
动作模块的位置反馈信号,所述驱动控制系统与中空型电机电连接,向中空型电机发送驱动指令信号,控制中空型电机运转,并接收位移传感器输出的位置反馈信号,用于判断当前传动
‑
动作模块发生的位移,调控中空型
电机和传动
‑
动作模块的联动运动,使直线作动器输出连续直线往复运动。
9.第二方面,一体化通用型直线作动器的制造工艺,用于制造第一方面所述的一体化通用型直线作动器,包括如下步骤:
10.步骤1),完成中空型电机的制造,其中,所述中空型电机的通孔加工尺寸满足不小于丝杠螺母的外径,第一连接销孔的加工位置满足与第二连接销孔位置对应;
11.步骤2),完成丝杠推杆与丝杠螺母的制造;
12.步骤3),将丝杠螺母嵌入中空型电机转子轴的通孔中,并保证第一连接销孔和第二连接销孔位置对应;
13.步骤4),将销轴一并穿插入第一连接销孔和第二连接销孔中,使丝杠螺母与中空型电机转子轴固定连接;
14.步骤5),将销轴与丝杠螺母机械固连;
15.步骤6),将丝杠推杆旋入丝杠螺母内;
16.步骤7),将传动
‑
动作模块壳体、滑动轴承、限位销钉安装到位,并固定;
17.步骤8),手动调节丝杠推杆伸出传动
‑
动作模块的长度,直至丝杠推杆运行至机械零位;
18.步骤9),抽动位移传感器的中心抽头,使其逐渐旋入机
‑
电联动锁紧装置的径向锁紧螺母内,直至软件显示系统显示为电气零位;
19.步骤10),通过插入径向穿设机
‑
电联动杆环状结构与锁紧螺母的连接件将机
‑
电联动杆与中心抽头锁紧,
20.通过拧紧第一紧固件将机
‑
电联动杆与丝杠推杆锁紧,使传动
‑
动作模块的丝杠推杆与位移传感器的中心抽头的同步联动,实现机械零位与电气零位保持同步联动。
21.根据本发明提供的一体化通用型直线作动器及其制造工艺,具有以下有益效果:
22.(1)本发明通过集成度较高的一体化连接结构,将电机转子和丝杠螺母副巧妙地集成在一起,不仅优化了传统直线作动器的体积和重量,提高了空间利用率,而且能够克服非一体化连接结构可能出现的传动间隙、累计误差、刚性较差、易卡滞失效等问题。在最大外径不大于70mm,长度不大于100mm,整体装置重量小于2.0kg的情况下,能够输出较大推力。一体化结构拆装方便,结构轻巧,很好地满足了安装于有限空间和输出直线动作的功能要求。
23.(2)本发明具有极强的结构通用性,可根据需要选用不同形式、不同规格的丝杠螺母副。当装置选用滑动丝杠螺母副时,输出直线运动的推杆可以很好地实现自锁功能,使直线作动器仅可以在电动机的驱动下动作,不受外界作用力的反向影响,可实现推力不变的稳定承载特性;当装置选用滚动丝杠螺母副时,输出相同直线推力下中空型电动机的体积可以更小,传动效率更高,定位精度更准,可实现快速响应的伺服机动特性;当装置选用行星滚柱丝杠螺母副时,直线作动器的承载能力更高,传动比范围更广,运行状态更平稳,直线往复行程更大,虽然成本较高,但实现传动要求特殊的工作服役场合。
24.(3)本发明通过机
‑
电联动锁紧装置使机械零位和电气零位保持同步联动,较大地提高了直线运动精度。同时,通过在装配阶段便引入高精度的驱动控制系统,可实现直线作动器精准的位置控制功能。
25.(4)本发明通过特制滑动轴承、限位销钉、第一连接销孔、第二连接销孔和销轴等
局部结构,能够提高直线作动器整机的轴向刚度和机械耐磨性,装置稳定可靠,能够承受较大冲击,工作寿命相对较长,具有良好的服役能力和质量可靠性。
26.(5)本发明提出了简单可靠的研制工艺路线,使得该一体化通用机构的直线作动器制造有依可循,工艺细节可根据功能需要和生产条件自行调整,具有很好地通用性。
附图说明
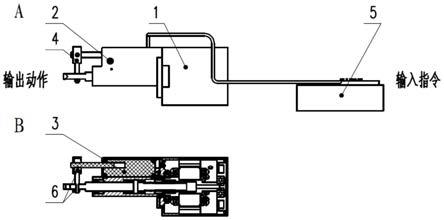
27.图1a和1b为本发明的装置的整体结构示意图;
28.图2为本发明的中空型电机的结构示意图;
29.图3为本发明的传动
‑
动作模块的结构示意图;
30.图4为本发明的位移传感器的结构示意图;
31.图5为本发明的机
‑
电联动锁紧装置的结构示意图;
32.图6为本发明的驱动控制系统的示意图。
33.附图标号说明
[0034]1‑
中空型电机;11
‑
电机定子;12
‑
电机转子绕组;13
‑
中空型电机转子轴;14
‑
通孔;15
‑
第一连接销孔;16
‑
凹槽;2
‑
传动
‑
动作模块;21
‑
丝杠推杆;22
‑
丝杠螺母;23
‑
传动
‑
动作模块壳体;24
‑
滑动轴承;25
‑
限位销钉;26
‑
第二连接销孔;27
‑
销轴;3
‑
位移传感器;31
‑
中心抽头;32
‑
传感器本体;4
‑
机
‑
电联动锁紧装置;41
‑
径向锁紧螺母;42
‑
卡簧;43
‑
机
‑
电联动杆;44
‑
第一紧固件;5
‑
驱动控制系统;51
‑
系统驱动控制板;52
‑
软件显示系统。
具体实施方式
[0035]
下面通过对本发明进行详细说明,本发明的特点和优点将随着这些说明而变得更为清楚、明确。
[0036]
在这里专用的词“示例性”意为“用作例子、实施例或说明性”。这里作为“示例性”所说明的任何实施例不必解释为优于或好于其它实施例。尽管在附图中示出了实施例的各种方面,但是除非特别指出,不必按比例绘制附图。
[0037]
本发明提出一种一体化通用型直线作动器,结构组成如图1
‑
图6所示。该直线作动器包括中空型电机1、传动
‑
动作模块2、位移传感器3、机
‑
电联动锁紧装置4和驱动控制系统5;
[0038]
所述中空型电机1与传动
‑
动作模块2通过丝杠螺母副连接,使中空型电机1的旋转运动直接转化为传动
‑
动作模块2的直线往复运动,所述位移传感器3与传动
‑
动作模块2通过机
‑
电联动锁紧装置4连接,并向驱动控制系统5输出传动
‑
动作模块2的位置反馈信号,所述驱动控制系统5与中空型电机1电连接,向中空型电机1发送驱动指令信号,控制中空型电机1运转,并接收位移传感器3输出的位置反馈信号,用于判断当前传动
‑
动作模块2发生的位移(即丝杠推杆21伸出的长度),精准地调控中空型电机1和传动
‑
动作模块2的联动运动,使直线作动器输出连续直线往复运动。
[0039]
如图2所示,中空型电机1主要包括电机定子11、电机转子绕组12和中空型电机转子轴13,所述电机转子绕组12和中空型电机转子轴13为电机转子的组成结构件;所述中空型电机转子轴13的一端具有设定直径的通孔14,沿通孔14径向圆周均匀分布有若干第一连接销孔15,中空型电机转子轴13的另一端部具有“一”、“十”字等形状的凹槽16,用于实施对
电机转子的手动调节。
[0040]
如图3所示,传动
‑
动作模块2包括丝杠推杆21、丝杠螺母22、传动
‑
动作模块壳体23、滑动轴承24和限位销钉25;所述传动
‑
动作模块壳体23作为主要的承力结构与中空型电机1的壳体固定连接,用于承载所述丝杠推杆21、丝杠螺母22、滑动轴承24和限位销钉25,支撑直线作动器的一体化结构,所述传动
‑
动作模块壳体23内部开设有空腔结构,用于容纳所述丝杠推杆21,靠近中空型电机1一侧的空腔结构的内壁上轴向加工有至少两条对称分布的滑道,用于与丝杠推杆21上固定的限位销钉25配合,对丝杠推杆21的运动起导向作用;优选地,所述滑道的长度不大于所述丝杠推杆21的最大运动行程,通过所述滑道的长度,确定了所述丝杠推杆21的实际运动行程。
[0041]
所述丝杠推杆21与丝杠螺母22旋合形成丝杠螺母副,丝杠螺母22安装于中空电机转子轴13的通孔14中,丝杠螺母22的径向圆周均匀分布有第二连接销孔26,所述第二连接销孔26与中空型电机转子轴13上的第一连接销孔15对准,通过销轴27固定连接,固定连接方式可采取过盈、激光焊接或铆接等制造工艺,最终实现直线作动器中空型电机1和传动
‑
动作模块2的一体化连接;所述滑动轴承24安装于所述传动
‑
动作模块壳体23空腔结构的一端,并与空腔结构的一端形成过盈配合,对丝杠推杆21起到支撑作用,并具有良好的润滑功能;所述限位销钉25径向固定于所述丝杠推杆21上(优选丝杠推杆21上径向加工有固定限位销钉25的通孔),并置于所述传动
‑
动作模块壳体23内部滑道内,限位销钉25在滑道内只能为轴向直线运动,进而限制了丝杠推杆21的周向旋转,最终将丝杠螺母22的旋转运动转化成丝杠推杆21的直线运动,同时,限位销钉25在所述传动
‑
动作模块壳体23内部滑道上滑行时,由于所述滑道的长度不大于所述丝杠推杆21的最大运动行程,能够对丝杠推杆21的行程起到限位保护作用,以免丝杠推杆21因直线往复运动的惯性从丝杠螺母22中滑脱。
[0042]
优选地,所述丝杠推杆21包括丝杠螺母副段和光滑柱面段,所述丝杠螺母副段用于与丝杠螺母22配合,部分位于中空型电机转子轴13内部,所述光滑柱面段与所述滑动轴承24配合,在所述传动
‑
动作模块壳体23内部往复运动。
[0043]
更优选地,所述丝杠推杆21与丝杠螺母22形成的丝杠螺母副可以采用滑动丝杠螺母副、滚动丝杠螺母副或行星滚柱丝杠螺母副等任意形式,使本发明直线作动器具有极强的结构通用性。
[0044]
如图3所示,位移传感器3安装于传动
‑
动作模块2上。如图4所示,位移传感器3为直线位移传感器,具有中心抽头31和传感器本体32,中心抽头31伸出传感器本体32不同长度对应输出不同的反馈电压。
[0045]
如图5所示,机
‑
电联动锁紧装置4的一端与丝杠推杆21连接,另一端与中心抽头31连接,使丝杠推杆21与中心抽头31同步运动。具体地,机
‑
电联动锁紧装置4包括径向锁紧螺母41、机
‑
电联动杆43和第一紧固件44;所述机
‑
电联动杆43的一端为杆状结构,穿过丝杠推杆21末端的通孔并通过第一紧固件44紧固;另一端为环状结构,中部开设轴向通孔并套设于中心抽头31的外围,轴向通孔与中心抽头31之间安装有径向锁紧螺母41,径向锁紧螺母41与中心抽头31螺纹配合,外轮廓与轴向通孔配合,通过径向穿设机
‑
电联动杆43环状结构与径向锁紧螺母41的连接件,将机
‑
电联动杆43与位移传感器中心抽头31固定连接。机
‑
电联动锁紧装置4保证了位移传感器3的中心抽头31与丝杠推杆21的同步联动,使机械输出零位与电气输出零位精准统一。优选所述径向锁紧螺母41的外侧安装有卡簧42,进一步防止
径向锁紧螺母41产生轴向移动。
[0046]
如图6所示,驱动控制系统5包括系统驱动控制板51和软件显示系统52,系统驱动控制板51采用pcb电路板形式实现,系统驱动控制板51上的电压采集模块具有两路ad采集、电源模块有5v和3.3v输出,用于向位移传感器3供电,根据软件显示系统52的示数判断当前直线作动器位移位置(即丝杠推杆21伸出长度),实时显示直线作动器的运行状况;
[0047]
本发明提供的一体化通用型直线作动器的工作过程为:驱动控制系统5首先发送驱动指令至中空型电机1,中空型电动机转子轴13带动传动
‑
动作模块2中的丝杠螺母22同步转动,进而推动丝杠推杆21的直线运动,丝杠推杆21通过机
‑
电联动锁紧装置4与位移传感器3的中心抽头31同步联动,使位移传感器3实时反馈丝杠推杆21的直线位移,相应的位置反馈信号(以反馈电压的形式)输入驱动控制系统5,最终形成直线作动器的控制反馈闭环。
[0048]
根据本发明的第二方面,提供了一体化通用型直线作动器的制造工艺,包括如下步骤:
[0049]
步骤1),根据直线作动器功能需要,完成中空型电机1的制造,重点关注通孔14的加工尺寸和第一连接销孔15的加工位置,通孔14加工尺寸满足不小于丝杠螺母22的外径,第一连接销孔15的加工位置满足与第二连接销孔26位置对应;
[0050]
步骤2),完成丝杠推杆21与丝杠螺母22的制备,并根据直线作动器服役需要完成热处理等具体工艺;
[0051]
步骤3),将丝杠螺母22嵌入中空型电机转子轴13的通孔14中,并保证第一连接销孔15和第二连接销孔26位置的精准对应,此处的丝杠螺母22与通孔14的配合可根据直线作动器输出需要自行调整;
[0052]
步骤4),将销轴27一并穿插入第一连接销孔15和第二连接销孔26中,使丝杠螺母22与中空型电机转子轴13固定连接。
[0053]
步骤5),利用激光焊接工艺等方式将销轴27与丝杠螺母22机械固连,保证丝杠螺母22与中空型电机转子轴13之间可以传递较大的力矩,此处的机械固连方法不局限于激光焊接,可根据需要自行调整;
[0054]
步骤6),将丝杠推杆21旋入丝杠螺母22内;
[0055]
步骤7),将传动
‑
动作模块壳体23、滑动轴承24、限位销钉25安装到位,并固定;
[0056]
步骤8),手动调节丝杠推杆21伸出传动
‑
动作模块2的长度,直至丝杠推杆21运行至机械零位;
[0057]
步骤9),抽动位移传感器3的中心抽头31,使其逐渐旋入机
‑
电联动锁紧装置4的径向锁紧螺母41内,直至软件显示系统52显示为电气零位;
[0058]
步骤10),通过插入径向穿设机
‑
电联动杆43环状结构与锁紧螺母41的连接件将机
‑
电联动杆43与中心抽头31锁紧,通过拧紧第一紧固件44将机
‑
电联动杆43与丝杠推杆21锁紧,使传动
‑
动作模块2的丝杠推杆21与位移传感器3的中心抽头31的同步联动,实现机械零位与电气零位保持同步联动。
[0059]
本实施例中,根据中空型电机1型号、丝杠推杆21丝杠螺母副段长度、传动
‑
动作模块壳体23内部滑道长度的选择/调整,直线作动器的直线运动行程可调,如可实现0mm~100mm或更长运动行程的直线往复运动。
[0060]
本实施例中,通过机
‑
电联动锁紧装置4使丝杠推杆21与位移传感器3的中心抽头31同步联动,使直线作动器的直线运动输出位置精准,可实现≤0.1mm的直线定位运动。
[0061]
本实施例中,直线作动器整体结构紧凑、小巧轻便,通过各器件选择,该直线作动器的最大外径不大于70mm,长度不大于100mm,整体装置重量小于2.0kg。
[0062]
本实施例中,通过丝杠螺母与通孔的选择配合,直线作动器可广泛应用于各个直线动作功能需求中。
[0063]
以上结合具体实施方式和范例性实例对本发明进行了详细说明,不过这些说明并不能理解为对本发明的限制。本领域技术人员理解,在不偏离本发明精神和范围的情况下,可以对本发明技术方案及其实施方式进行多种等价替换、修饰或改进,这些均落入本发明的范围内。本发明的保护范围以所附权利要求为准。
[0064]
本发明说明书中未作详细描述的内容属本领域技术人员的公知技术。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。