智能带阀保持室
1.本技术要求于2016年5月19日提出的申请号为62/338,798的美国临时申请,以及于2016年7月25日提出的申请号为62/366,327的美国临时申请的权利,其整体内容以引用的方式并入本文中。
技术领域
2.本技术涉及在通过带阀保持室(valved holding chamber,vhc)和定量吸入器(metered dose inhaler,mdi)输送肺用气溶胶(aerosol)的技术领域中使用的装置和系统,特别是涉及用于改进病人对其药物方案的依从性并向用户、开处方者或付款者提供关于正确吸入技巧和治疗结束的反馈的装置和系统。
背景技术:
3.vhc系统与mdi系统通常用于治疗诸如哮喘、慢性阻塞肺病(copd)和囊胞性纤维症等情况。遇到这些情况的病人可能会表现对用药方案或治疗方案的依从性,使用不适当的装置技巧,和/或无法接收剂量保证的反馈。这些类型的问题可能会给医疗系统造成额外的成本负担,以及小于最佳的治疗效果。
4.用药的规范性通常难以监控,尽管此信息对于医疗和保险人员是非常宝贵的。当前,并没有主动监测病人使用vhc的方法,并且,尽管近期出现了智能吸入器,但大多数mdi仍然不能自主监控并通信药物使用情况。因此,需要提供一种能够监测药物使用情况并且向用户、医疗提供者和保险人员提供反馈的vhc。
技术实现要素:
5.在将mdi插入vhc时,系统识别插入vhc中的mdi。当用户执行练习呼吸时,系统监测流速并向用户提供关于其技术的反馈,包括用户呼吸是否太快,或者他们的屏息是否足够。在该练习阶段期间,系统能够通知用户其呼吸周期中的最合适时间以启动mdi。
6.一旦mdi被启动,系统检测并记录启动和启动与第一吸入流之间的持续时间。该信息用于在当前治疗之后和/或在后续治疗开始时提供协调反馈。在吸入结束时,测量用户的屏息持续时间的第二定时器可以开始。该信息可用于在下一次屏息之前或下一次治疗之前提供进一步的反馈。
7.在mdi启动之后,系统可以确定用户何时接收了他们的全剂量药物。这可以通过测量流速并对输送的总体积进行积分或通过其他方式来完成。在治疗结束时,通知用户并且系统默认等待mdi的第二次启动。如果在没有启动的情况下过去太多时间,系统将关闭。另外,在一个实施例中,如果用户移除mdi,则程序将终止。
8.不同方法可以用于中继信息,并向用户提供反馈。led、led板,7段显示器、lcd屏和/或oled屏可用于提供视觉反馈。具有户自行决定静音的选项的听觉反馈也可以被使用。也可以使用触觉反馈,例如,当拉动过大的流速时vhc振动。使用诸如app或网站,信息可以被显示屏、移动设备、远程计算机或其他用户界面上。
9.不同系统和装置改善患者的依从性,改善装置技术并提供剂量保证。反过来,通过确保适当的依从性,这些方面帮助降低医疗系统和提供者(付款人)的成本。此外,具有关于依从性和使用的可靠信息的医疗服务提供者(开处方者)可以依赖于患者特定数据以做出关于治疗方案和变化的知情决定。反过来,患者从治疗中获得最大利益,同时还降低了自付费用。
10.前面的段落是作为一般性介绍提供的,并不旨在限制以下权利要求的范围。通过结合附图参考以下具体描述,将最好地理解不同优选实施例以及其他优点。
附图说明
11.附图示出了不同实施例的药物输送系统、其结构示意图/流程图、使用方法以及其组件。
12.图1是示出了病人依从性、治疗方案和付款人交互的反馈环的流程图示。
13.图2是示出了智能vhc装置的使用和反馈环的流程图。
14.图3是智能vhc一实施例的侧视图。
15.图4是智能vhc另一实施例的侧视图。
16.图5a和图5b示出了药物容器的真实图像和灰度图像。
17.图6是示出图5a中所示的药物容器的适当标识的图像。
18.图7是智能vhc不同可选实施例的侧视图。
19.图8是示出了mdi启动(actuation)的光检测器输出与时间的图表。
20.图9是智能vhc另一实施例的侧视图。
21.图10是不同mdi规格的输出与流速的图表。
22.图11是涉及mdi使用的不同输入/输出的示意图。
23.图12是示出mdi使用和反馈环的流程图。
24.图13是智能vhc另一实施例的侧视图。
25.图14是智能vhc另一实施例的端视图。
26.图15是示出了阀开口与流速之间的相关性的图表。
27.图16是示出了不同控制器输入的示意图。
28.图17是示出了mdi使用和反馈环的流程图。
29.图18是智能vhc另一实施例的侧视图。
30.图19是智能vhc另一实施例的部分侧视图。
31.图20是mdi启动的压力传感器输出与时间。
32.图21是示出了mdi启动和吸入期间的压力变化与时间的图表。
33.图22是示出了不同控制器输入的示意图。
34.图23是示出了mdi使用和反馈环的流程图。
35.图24是智能vhc另一实施例的侧视图。
36.图25是示出了通过声音识别mdi的示意图。
37.图26是示出了不同流速下的振幅与时间的图表。
38.图27是示出了不同控制器输入的示意图。
39.图28是示出了mdi使用和反馈环的流程图。
40.图29是使用一实施例药物输送系统的示意图。
41.图30是配置有接触传感器的面罩可选实施例的透视图。
42.图31是面罩的示意图及面罩密封边缘的一部分的放大剖视图。
43.图32是示出了控制器的输入输出的示意图。
44.图33是示出了面罩使用的流程图。
45.图34是示出了活动阀使用的流程图。
46.图35是设置于药物输送系统的流通道中的活动阀一实施例的剖视图。
47.图36是图35中所示的阀一实施例的端视图。
48.图37是示出了具有活动阀和没有活动阀的吸入与呼出周期的流与时间的图表。
49.图38是智能vhc可选实施例的侧视图。
50.图39是不同mdi产品的最小羽流温度与热偶的函数。
51.图40是应用于一实施例vhc的mdi的部分剖视侧视图。
52.图41是应用于另一实施例vhc的mdi的部分剖视侧视图。
53.图42是示例性的mdi启动的力与位移。
54.图43是vhc的后端组件(backpiece)一实施例的端视图。
55.图44是图43中所示的后端组件的侧视图。
56.图45a和图45b是相对智能vhc位于启动位置和非启动位置处的mdi的部分剖视侧视图。
57.图46是智能mdi一实施例的局部剖视图。
58.图47是智能mdi一实施例的局部剖视图。
59.图48是智能mdi一实施例的局部剖视图。
60.图49是智能mdi一实施例的侧视图。
61.图50是图49中所示的智能mdi的局部放大示意图
62.图51a
‑
图51c是可选vhc实施例的不同侧视图。
63.图52是vhc一实施例的局部剖视侧视图。
64.图53是vhc一实施例的局部剖视侧视图。
65.图54是vhc一实施例的局部剖视侧视图。
66.图55是不同mdi装置的压力与流的图表。
67.图56是vhc一实施例的侧视图。
68.图57是图56中所述的vhc的局部放大侧视图。
69.图58是vhc一实施例的侧视图。
70.图59a
‑
图59c是具有振动梁的鸭嘴阀的不同视图。
71.图60是流速传感器组件一实施例的局部剖视侧视图。
72.图61是流速传感器组件一实施例的局部剖视侧视图。
73.图62是流速传感器组件一实施例的局部剖视侧视图。
74.图63是vhc一实施例的侧视图。
75.图64是vhc另一实施例的侧视图。
76.图65是vhc另一实施例的侧视图。
77.图66a
‑
图66c是具有用户标记的不同图形显示。
78.图67是示出了智能vhc和用户界面之间的通信的示意图。
79.图68是示出了插入到vhc的mdi的局部剖视侧视图。
80.图69是部分插入位置和完全插入位置时vhc的局部剖视侧视图。
81.图70是vhc一实施例的端视图。
82.图71是vhc另一实施例的端视图。
83.图72是vhc另一实施例的端视图。
84.图73是vhc另一实施例的端视图。
85.图74是vhc另一实施例的端视图。
86.图75是配置有用于闭合vhc中的电回路的导电材料的mdi。
87.图76是mdi和vhc的侧视图。
88.图77是mdi或vhc的显示器的视图。
89.图78是智能vhc一实施例的侧视图。
90.图79是适配器具有显示器的带阀保持室的透视图。
91.图80是图79中所示的适配器的透视图。
92.图81是后端组件具有显示器的带阀保持室的透视图。
93.图82是图81中所示的后端组件的透视图。
94.图83是示出了计算机结构的示意图。
95.图84是通信系统的结构示意图。
96.图85是示出了智能vhc和mdi的使用方法的流程图。
97.图86是智能vhc和mdi的视图。
98.图87是活动阀一实施例的侧视图。
具体实施方式
99.应当理解,文中的术语“多个”意味着两个或更多。术语“耦合”意味着直接或间接地连接、卡合等关系,例如,与配合件连接,虽然可以表示永久性的固定或连接(或内置),但其并不表示一定为永久性的连接,并且可表示机械的或电气的连接。术语“第一”、“第二”等并不分配给特定的元件,而仅仅是以不同的数字顺序表示这些原件,也就是说一个命名为“第一”的元件在后续的描述中也可以改为用“第二”进行描述,这由它们的描述顺序所决定。应当理解,“第一”和“第二”也不意味着两个元件或值是不同的,也就是说,第一元件与第二元件可以是相同的元件,只是被赋予了不同的名称以区分这些元件。
100.在传统的病人/开处方者/付款人的模式中,病人被开有治疗的处方,并购买药物和/或治疗装置。如果购买是由付款人支付,则通常不向付款人反馈治疗是否被正常且按照处方执行,除了进一步的治疗的后续请求之外。病人通常由开处方者就如何使用医疗装置进行训练,并被告诉在日常生活中使用该装置。在某些时候,病人可能跟踪处方,因为状态变化、处方补充,或者按照设定频率。此时,开处方者需要对治疗的有效性进行评估,并决定修改还是继续治疗。如果开处方者决定修改治疗,则新的处方被给出,且循环重复。改善对治疗方案的依从性中所面临的一些技术挑战,这反过来可能提高跟踪及诊断成本,包括有效监控不同治疗装置的功能及装置的使用的能力、如何向用户和/或开处方者提高有效实时的反馈以及如何在一些情况下对设备的性能和/或用户的行为/技巧进行实时变化等的
挑战。
101.如图1和图2所示,可以引进不同的智能装置及与其相关的反馈,以提高治疗方案的有效性。此外,将病人相关数据提供给开处方者,以关于治疗做出明智决定,包括治疗的修改,并且,付款人在支付另一处方之前可以得到病人已依从于治疗方案的保证。
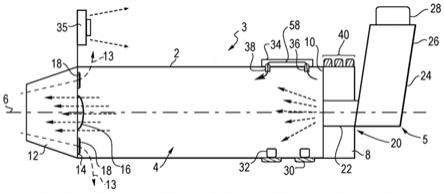
102.如图3所示,一示例性实施例的智能vhc包括室壳体2,其具有定义沿着纵轴/吸入流路径6延伸的内部空间的壁;后端组件(backpiece)8,其与室壳体的输入端和嘴部连接;以及阀组件12,其与室壳体的输出端连接。嘴部组件与室壳体可释放且可移动连接,例如,通过凹槽中适配的凸起。嘴部被配置有吸入阀16和/或呼出阀18,呼出阀18提供呼出流通道13。可选地,吸入阀和呼出阀可以被放置在vhc的其他组件上。在不同实施例中,阀可以被配置为环形阀门的一部分,其内周定义吸入阀16而外周定义呼出阀18。在其他实施例中,吸入阀被配置为鸭嘴阀,其也可以具有定义呼出阀的外部环形凸缘。在其他实施例中,吸入阀和呼出阀可以不是一个整体,而是单独成型并设置于vhc中。后端组件8被配置有开口20,开口20被成型以容纳mdi启动件(boot)24的嘴部(mouthpiece)部分22。该启动件还包括管道部26,其定义用于容纳药物容器28的腔。该启动件还包括支撑块,其定义用于容纳mdi的阀杆的井部。该井部与孔连通,将气化的药物释放到室壳体的内部空间中。例如且不限于,美国专利号为6,557,549、7,201,165、7,360,537和8,550,067,其申请人与本技术的申请人一致,均为特鲁德尔国际医药(trudell medical international),且其整体内容以引用的方式并入本文,公开了不同实施例的vhc和mdi,包括口部组件、室壳体和后端组件。
103.在一实施例中,vhc 3被配置为正确地识别插入vhc中的mdi,并且正确地识别mdi 5何时被启动(actuated),以及,例如,如图12所示,向用户提供关于正确使用技巧的反馈。例如,如图3和图7,vhc可具有在内部空间4中与室壳体的壁连接的蓝色led 30以及也设置于内部空间4中的光检测器32,光检测器32与led30间隔设置。例如光检测器32可连接至壁。摄像机35可以与室壳体2连接,例如,与嘴部组件12相邻,或者靠近后端组件8。流检测器,例如流传感器34,与室壳体的壁连接,并且具有与内部空间连通的输入端口36和输出端口38。反馈装置,例如,诸如led或者led阵列等的视觉反馈指示器40,设置于后端组件8上,虽然反馈装置也可以与室壳体或者嘴部组件连接。
104.如图79和图80所示,适配器50包括具有c形内部区域52的壳体,其可通过卡合的方式与室壳体2配合连接。该适配器包括反馈装置,其被配置为用户可见的显示器54,且可包括微控制器56和通信组件。如图81和图82所示,后端组件包括显示器54和/或微控制器56。在每个实施例中,显示器54向用户和/或护理人员显示不同信息,例如本文中公开的各种反馈信息。在不同实施例中,微控制器56可以被实现为如图16所示的控制器设计,图22或图27中的微控制器设计,或者如图83所示的具有更复杂的计算机500的一个或多个组件的处理器502。
105.通信和数据处理
106.为了实现上述目的,该装置,例如与mdi关联的vhc,可被配置为执行以下一个或多个操作:(1)正确地识别与vhc一起使用的mdi;(2)正确地识别mdi何时被启动;(3)监测并向用户提供关于正确使用技巧的反馈;以及(4)向开处方者和/或提供人提供病人相关数据。如图2、图16、图65、图66a
‑
图66c、图67、图83和图84所示,实施例的一方面还涉及数据的处理。vhc和/或mdi输入的数据可被传输至外部设备,例如智能手机、平板电脑、个人电脑等。
如果此外部设备不可用,则数据可以被存储在vhc和/或mdi的内部,数据存储模块或其他存储器中,并且在vhc/mdi与外部设备之间的下一同步时进行传输。软件可以伴随着vhc/mdi以实现数据传输和分析。
107.为了更快和更精确地处理从智能vhc和/或mdi内所生成且例如来自于一个或多个不同传感器的数据,数据可以与智能手机、本地计算装置和/或远程计算设备进行无线通信,以对原始传感器数据进行编译和处理。
108.在一实施例中,智能vhc和/或mdi包括电路,其用于将实时原始传感器数据发送给本地设备,例如智能手机。智能手机可以向用户显示图形或指令,并执行处理软件以对原始数据进行编译和处理。智能手机可具有软件,其过滤并处理原始传感器数据,并将包含在原始传感器数据中的相关状态信息输出给智能手机上的显示器。可选地,智能手机或其他本地计算装置可以使用其本地资源,以访问远程数据库或服务器以获取处理程序,或者转发原始传感器数据以进行远程处理和编译,以及从远程服务器接收处理和编译后的传感器数据,以向用户或与智能vhc的用户一起的护理人员进行显示。
109.除了简单地在智能vhc和/或mdi附近的智能手机或其他本地计算机上展示数据、统计或指令之外,也可以主动地管理和控制与智能vhc和/或mdi相关的主动操作。例如,如果智能vhc和/或mdi附近的智能手机或其他本地计算机判定传感器数据指示出已达到治疗结束或者需要进一步的治疗,则智能手机或其他本地计算装置可将此信息直接通信给病人。也可以考虑其他变形,例如,远程服务器与智能手机通信,或者直接与智能vhc和/或mdi通过通信网络进行通信,从而可以将信息和指令提供给病人/用户。
110.在其他实现方式中,智能vhc和/或mdi收集且由智能手机中转至远程服务器的实时数据可以触发远程服务器对其进行跟踪,并将关于特定疗程的问题或基于特定用户的过去疗程而随着时间发展的模式通知给医师或者护理负责人。根据智能vhc和/或mdi中的一个或多个传感器的数据,远程服务器可生成警告,以通过文字、邮件或其他电子通信媒介的形式发送给用户、用户的医师或其他护理人员。
111.上述智能vhc和/或mdi、本地计算装置和/或远程服务器中的电子电路(例如,图16的控制器设计),可包括与网络526通信和/或与其他计算机直接通信的计算机500的部分或全部功能。如图65、图66a
‑
图66c、图67、图76、图77、图83和图84所示,计算机500可包括处理器502、存储装置516、显示器或其他输出装置510、输入装置512和网络接口装置520,所有通过总线508连接。电池503与计算机偶接并为计算机供电。计算机可与网络通信。处理器502可代表任何类型架构的中央处理单元,例如复杂指令集计算(complex instruction set computing,cisc)、精简指令集计算(reduced instruction set computing,risc)、超长指令字(very long instruction word,vliw)或混合架构,虽然任何适当的处理器都可以被使用。处理器502执行指令,并包括控制整个计算机的操作的计算机500的一部分。尽管图83和图84中未示出,但处理器502通常包括控制单元,其组织存储器中的数据和程序,并传递在计算机500的不同部分之间的数据和其他信息。处理器502接收来自输入装置512的输入数据,网络526读取并将指令524(例如处理器可执行的代码)和数据存储到主存储器504中,例如随机访问存储器(random access memory,ram)、例如只读存储器(read only memory,rom)的静态存储器506和存储装置516。处理器502可经由输出装置510将数据展示给用户。
112.尽管计算机500被示出只包括单个处理器502和单个总线508,本技术的各实施例
同样可以应用于具有多个处理器的计算机或者具有多条总线的计算机,这些处理器和总线中的部分或全部以不同的形式执行不同的功能。
113.存储装置516表示用于存储数据的一个或多个机构。例如,存储装置516可包括计算机可读介质522,例如rom、ram、非暂态存储介质、光学存储介质、闪存装置和/或其他机器可读介质等。在其他实施例中,可以使用其他任何适当类型的存储装置。尽管只示出了单个存储装置516,但可以存在多个存储装置和多种类型的存储装置。此外,虽然计算机500被示出包含存储装置516,但是其可以设置在其他计算机中,例如服务器上。
114.存储装置516可包括控制器(图未示)和计算机可读介质522,计算机可读介质522具有指令524,其能在处理器502上执行以实现前述功能,例如,处理传感器数据、显示传感器数据或基于传感器数据的指令、控制智能vhc和/或mdi的组件以改变其操作、联系第三方或其他远程资源以提供更新信息或者从这些远程资源中获取数据。在另一实施例中,这些功能中的部分或全部可通过硬件方式来实现,替代基于处理器的系统。在一实施例中,控制器为网络浏览器,但在其他实施例中,控制器可以为数据库系统、文件系统、电子邮件系统、媒体管理器、图像管理器等,或者可以包括任意能够访问数据条目的功能。存储装置516还可包括其他的软件和数据(图未示),这对理解本技术不是必需的。
115.输出装置510是计算机500的部分,其将输出显示给用户。输出装置510可以是计算机硬件领域内所习知的液晶显示器(liquid crystal display,lcd)。在其他实施例中,输出装置510可以由气体或等离子平板显示器或者传统的阴极射线管(cathode
‑
ray tube,crt)显示器代替。在其他实施例中,也可以使用任意合适的显示器装置。尽管只示出了一个输出装置510,在其他实施例中,可以存在任意数量的、不同类型或相同类型的输出设备。在一实施例中,输出装置510显示用户界面。输入装置512可以为键盘、鼠标或者其他指向装置、轨迹球、触摸板、触摸屏、小型键盘、麦克风、声音识别装置或者可供用户向计算机500输入数据并操作前述用户界面的任何其他设备。尽管只示出了一个输入装置512,但在另一实施例中,可以存在任意数量和类型的输入装置。
116.通过任意何时的通信协议,网络接口装置520提供从计算机500到网络526的连接。网络接口装置520通过无线或有线收发器514向网络526发送数据或从网络526接收数据。收发器514可以为蜂窝、射频(radio frequency,rf)、红外(infrared,ir)或其他任意能与网络526或其他智能设备102通信的多个已知无线或有线传输系统中的任何,智能设备102具有图83和84中示例计算机的部分或全部特征。总线508可代表一个或多个总线,例如usb、pci、工业标准架构(industry standard architecture,isa)、x总线、扩展工业标准架构(extended industry standard architecture,eisa)或任何其他适当的总线和/或桥接(也称为总线控制器)。
117.计算机500可以使用任意适合的硬件和/或软件来实现,例如个人计算机或其他电子计算设备。计算机500可以为移动计算机、便携电脑、平板电脑或笔记本电脑、智能电话、个人数字助理、口袋计算机、一体机、电话、大型计算机,这些是计算机500的其他可能配置的示例。网络526可以是任意适当的网络,并且可以支持用于与计算机500进行通信的任意协议。在一实施例中,网络526可支持无线通信。在另一实施例中,网络526可支持有线通信,例如通过电话线或线缆等。在另一实施例中,网络526可支持以太网ieee(电气与电子工程师协会)802.3x规格。在另一实施例中,网络526可以为因特网,并且可以支持因特网协议
(internet protocol,ip)。在另一实施例中,网络526可以为局域网或广域网。在另一实施例中,网络526可以为热点服务供应商网络。在另一实施例中,网络526可以为内网。在另一实施例中,网络526可以为通用分组无线业务(gprs)网络。在另一实施例中,网络526可以为任意蜂窝数据网络或基于小区的无线网络技术。在另一实施例中,网络526可以为ieee 802.11无线网络。在又一实施例中,网络526可以为其他任意网络或者网络的组合。尽管只示出了一个网络526,但在其他实施例中,可以使用任意数量的相同或不同类型的网络。
118.应当理解,本文中的不同技术可以以硬件或软件的形式实现,并且适当的情况下也可以以它们的组合的形式实现。因此,本技术实质上提供的方法和装置(或者它们的一部分)可以以有型媒介中的程序代码(即指令)的形式实现,例如软盘、cd
‑
rom、硬盘或其他机器可读存储介质,其中,当程序指令被录入设备(例如计算机)并执行时,该机器就可作为执行本技术的实质内容的装置。在程序代码在可编程计算机上执行的情况下,计算设备通常可包括处理器、处理器可读的存储介质(包括暂态和非暂态存储器和/或存储元件)、至少一个输入设备和至少一个输出设备。一个或多个程序可以实现或使用本技术描述的实质内容中的方法,例如,可以通过使用api、可重用控制等方式进行。此类程序可以在高级程序语言或者面向对象程序语言中实现,从而与计算机系统进行通信。然而,如果需要的话程序也可以以组件或机器语言的形式实现。在任意情况下,语言可以是编译语言,并且可以与硬件应用组合使用。尽管在示例性的实施例中,本技术的实质内容可通过一个或多个独立计算机系统实现,但是应当理解,其也可以以任意其他计算环境的方式实现,例如网络或分布式计算环境。此外,本技术的实质内容也可以在多个处理芯片或设备中实现,并且存储器也可以设置在多个设备中。所述设备可以是个人计算机、网络服务器或手持设备等。
119.正确的使用技巧
120.向用户提供关于吸入技巧的反馈是vhc帮助进行药物输送的一个特征。在一实施例中,如图3和图9所示,流检测器,被配置为流传感器34,可以用于采集数据,并提供关于技巧的反馈。流传感器测量用户吸入时的流速。吸入过快会导致大部分药物进入喉咙而不是肺部。肺部的有效药物沉积可通过控制吸入来实现。此外,可以对流速相对时间进行积分,以确定吸入的空气的体积,这可以用于向用户提供何时其已吸空室壳体的内部空间并接收全部剂量的指示。如图3和图9所示,流传感器34包括旁路通道58,其具有与内部空间连通的输入端口36和输出端口38。由输入端口36和输出端口38所定义的近端开口和远端开口之间的压差经过旁路通道而产生较小的流速。如图9所示,热式质量流传感器60用于测量流经过旁路通道的流,其与吸入流速相关。流传感器34和流传感器34’可以设置在图9所示的任意位置。流传感器测量流,而无需设置在内部空间4的流路径或者干扰流路径。这样,流传感器就不会干扰通过内部空间的气溶胶药物或者流路径。流速信息可以与mdi的启动检测和mdi识别结合,下面将更详细描述,以提供病人行为和装置使用的可靠洞察力。
121.如图12所示,流速信息被实时地用于向用户提供关于练习期间地反馈,例如通过反馈装置,例如指示器(视觉、听觉和/或触觉)或显示器,或者关于用户是否开始吸入的反馈,和/或用户是否需要降低流速的反馈,例如何时超过最大流速。还可以使用mdi启动以向用户提供初始化启动和/或开始吸入的反馈。首先,如图19所示,用户66将mdi插入的后端组件中。接触开关62或其他mdi插入检测器/传感器检测该插入操作。当mdi被插入时,智能vhc主动地寻找mdi启动和/或吸入流检测。根据通过反馈装置(例如,指示器或显示器)的反馈,
用户可启动mdi,从而将气化的药物分散到内部空间中,且启动时间戳被记录。随后,处理器502寻找由流传感器34通信的吸入流,并且记录该主动吸入的流速和时间戳。处理器502还比较流速与存储的预设流速,例如最大建议流量,并且向用户提供吸入流速是否超过预设流速的反馈。随后,处理器比较自流速计算得到的吸入量与内部空间4的体积,进而通知用户治疗完成以及剂量已被正确地管理。可选地,处理器可告知用户需要进一步吸入以完全清空内部空间。注意的是,在治疗开始之前,用户具有练习使用该装置的选项。在这种情况下,不插入mdi。相反,仅流传感器被激活。处理器记录流速并提供关于流速的反馈,并通知用户练习完成。
122.如图14
‑
图17所示,一实施例的智能vhc包括一薄皮状贴片,其包括安装在吸入阀16上的电阻应变计68,以在吸入过程中测量阀开口70的几何尺寸。通过粘贴或者在阀的注塑保持过程中的插入成型的方式,该应变计可被应用于阀。如图15所示,阀门16的开口的尺寸和持续时间可与吸入流速相关,以确认吸入完成。
123.如图16所示,控制器,可以设置本文所述的不同实施例的智能vhc上或者内部,与跟踪或控制智能vhc的操作的一个或多个传感器、开关或计量器通信。控制器可将收集的数据保存在存储器中,以用于后续下载至接收设备中,或者可以实时地将数据发送至接收设备。此外,控制器可执行从传感器收集数据的一些处理,或者其存储或传输原始数据。rf发射器模块和/或接收器模块可与智能vhc上的控制器相关联,以在智能vhc处于与远程手持或固定位置计算设备的通信网络的通信范围内时实时或后续与远程手持或固定计算设备通信。控制器可包括图83中所示的计算机系统500的一个或多个特征。此外,一个或多个传感器、开关或计量器可以以有线或无线的方式与控制器通信。
124.为了清楚地展示不同实施例智能vhc的其他特征,控制器电路被省略,然而,在这些实施例的一个版本中,考虑至少能管理路由或来自智能vhc的数据存储的控制器或其他处理单元。在其他实现方式中,智能vhc可以不自带处理器,且特定实施例中的不同传感器、计量器和开关可以直接与远程控制器或其他处理设备无线通信,例如手持设备或远程服务器。控制器或其他处理设备收集的数据可以与本地控制器的存储器或其他远程位置中的期望值或者预设值进行比较,以提供关于是否达到了期望的效果或者治疗的反馈基础。如果控制器更为复杂,且包括图83中所示的计算机500的元件中的多个,则该处理可以全部为智能设备(智能vhc、mdi等)的本地。在更基本的控制器设计中,数也可以简单地被上日期/时间,并被保存在本地或远程,以用于后续的处理。在一实施例中,数据还可以被本地地或远程地戳上唯一设备或病人标识器。
125.屏息也是促进药物扩散和优化药物在肺部沉积的一个特定步骤。用户的屏息可以使用下文中的方法进行监测,或者可以视觉或者听觉地鼓励用户屏住呼吸,而无需直接监测屏息。
126.1.二氧化碳检测
127.1.1.如图86所示,二氧化碳是细胞呼吸的副产物,其可以通过呼出呼吸从身体内排出。因此,呼出气中的二氧化碳的浓度明显高于环境空气中的浓度。使用二氧化碳传感器76,可以监测vhc的嘴部和面罩适配器部分内的二氧化碳浓度,更高浓度标识用户的呼吸周期的呼出阶段。将此数据与吸入流数据或检测用户吸入的其他形式进行结合,屏息持续时间可以被确定,并用以向用户提供反馈。吸入的结束可以被确定,例如,通过使用流阈值或
压力阈值。一旦吸入流或者压力下降到此阈值以下,屏息定时器可以开始,并不停止直到检测到二氧化碳浓度的峰值。
128.2.压力监测
129.2.1.如图18
‑
图20所示,压力传感器78可被放置于嘴部/面罩适配器或者室壳体内,从而可以监测用户呼吸周期的吸入阶段和呼出阶段。使用吸入压力阈值和呼出压力阈值,以便计算用户的屏息的持续时间。当吸入压力下降到吸入阈值以下时,屏息定时器开始,并且一旦呼出开始,且呼出压力阈值被超过,屏息定时器停止。压力传感器78可与计算机500和处理器502通信。
130.此外,通过假定潮气量并计算吸入呼吸数量,该装置可提供关于该室(chamber)何时为空的信息。假定的潮气量可以是基于年龄和性别,并可以在建立期间选择。由于内部空间4的体积已知,计算机500/处理器502处理正压力事件,以识别何时已启动mdi,随后计算表示吸入的负压力事件的数量,直到达到了室的体积。每个负压力事件应间隔常规呼吸周期,例如2秒
‑
5秒,因为在有限的总治疗时间周期内室的体积被疏散。如果这被满足,则确定药物已完全被输送。否则,向用户提供反馈,以继续吸入和/或呼吸周期。使用本文其他地方所描述的不同指示器,反馈可以是可听见的、可视的或触觉/可触的(例如,振动)或者其组合。假设需要额外的训练,该信息可以被记录、存储和/或反馈。
131.3.麦克风
132.3.1.使用期间通过vhc的吸入和呼出空气传播不同路径。由于使用不同的流路径,经过这些路径的流将可能会听起来相互不同。如图24中的示例所示,麦克风82可以用于监听吸入和呼出,并使用类似于实施例1.1和实施例2.1中的阈值方法,可以用于计算屏息持续时间。
133.此外,在治疗期间,并且一旦启动mdi,麦克风记录经过vhc的空气流的声音,并基于麦克风所记录的湍流量,可以由微处理器进行监测和分析。例如,如图26所示,一段时间内的翻译出来的声音的振幅与特定流速或流速的范围相关。通过指示器(视觉、听觉、触觉等),vhc可以向用户提供反馈,吸入率过高,或者超过预设最大流速。其他反馈可以包括治疗完成或数据上传完成的信息。一旦治疗完成,系统被重置,并准备用于下一mdi启动。
134.如图58所示,簧片或簧片阵列或序列84,例如,塑料或硅树脂,可以与麦克风82相邻设置。差动流激活或创建来自簧片的不同声学输出,其可以由麦克风82拾取并记录。如图59a
‑
图59c所示,单个簧片115或束可以穿过的阀口设置,如鸭嘴阀所示。由于阀的襟翼88因不同量打开或闭合,例如,响应于流速,用作振动弦的簧片115被制作得更薄或更厚,使得其可以产生可由麦克风82拾取的不同的声学信号。麦克风与计算机500和处理器502通信。
135.4.湿度传感器
136.4.1.当水蒸气进入肺部时,来自于周围环境的空气因水蒸气而变成饱和。当这空气被呼出时,其通过嘴部和面罩适配器,其中空气的湿度可以在此进行分析。通过用如图86所示的嘴部和面罩适配器中的传感器90连续监测湿度等级,呼吸周期的呼出阶段可以被检测到,并用于以类似于实施例1.1和实施例2.1的方式确定屏息持续时间。湿度传感器90与计算机500和处理器502通信。
137.5.温度传感器
138.5.1.当周围空气进入身体时,其被变暖到体温。使用温度传感器92(例如,请参看
图86),可以在嘴部和面罩适配器中监测空气温度。当观察到温度突然升高,这可以被解释为来自于用户的呼出。类似于前面屏息检测实施例,将呼出开始的检测与吸入测量(即,流或压力)相结合,屏息持续时间可以被计算,并反馈给用户以用于技巧改进。温度传感器92与计算机500和处理器502通信。
139.6.光幕
140.6.1.如图63和图86所示,光幕94或多个光幕可以与响应负压力和正压力的弹性件96结合使用。在吸入期间,该弹性件可以在一方向上被拉出,使得一对光幕中的一个的光束被破坏(或者恢复),这可以解释为用户的吸入。相反,在呼出期间,该弹性件在相反方向上被压迫,其中光幕中第二个的光束被破坏(或恢复)。这解释为用户的呼出。使用这些测量,两个光幕均被未破坏的时间表示屏息持续时间。可选地,单个光幕可以用于检测用户的呼出,另一方法(例如,吸如压力阈值或吸入流阈值)可以用于确定吸入的结束。
141.6.2.在另一实施例中,用户的呼出呼吸中的水分足够破坏光幕,光幕用于在没有弹性件的情况下检测呼出。
142.治疗的结束
143.当自带阀保持室接收气溶胶时,尤其是婴幼儿的面罩产品,一个不确定性在于了解用户何时自室接收了所有药物。在气溶胶的使用期间,过早移除室可能导致低剂量以及过量面罩泄露量。通过监测室内的气溶胶或经过室所吸入的空气的容积,可以向用户反馈关于治疗的结束。这为病人的健康所涉及的各个方面提供剂量保证。
144.1.电容变化
145.1.1.假设气溶胶具有相对于空气的介质不同的介质,如图43和图44所示的电容106的电容变化可以用于检测何时所有气溶胶从室空出。在气溶胶启用之前,可以测量基准线电容,并且治疗将不结束,直到电容返回到该基准线值或一些相似值。
146.2.光传输/反射
147.2.1.如图3和图7所示,相对于直接指向光检测器或从表面反射到光检测器的光源的流,可以在任何方向上建立光源30和光检测器32。当气溶胶存在时,光被散射、扩散、折射、吸收和反射,使得返回到光检测器的光量减少。当达到基准线读数时,治疗结束。
148.流检测
149.当流速很高时,气溶胶在喉部和上呼吸道中沉积,导致副作用,也会剥夺肺部的治疗。智能vhc应具有反馈装置或者功能,使用流检测器而通知用户是否超过预设最大推荐流速,并允许用户将其吸入降低到有效速度。如下所述的所有实施例的流检测器,单独或者结合,可以用于此目的,除了有助于确定治疗的结束之外。如图12所示,通过将这些流速相对时间进行积分直到达到阈值体积,确定治疗的结束。阈值体积被选择,使得所有气溶胶自室被吸入。
150.3.压力传感器
151.3.1穿过阀的差动压力
152.如图46所示,选择阀,具有低迟滞率并优选地为线性,使得其阻力是连续的。随后,经过阀的流可以基于穿过阀的差动压力被推断出。
153.3.2.穿过mdi的差动压力
154.3.2.1 mdi启动件
155.mdi识别器用于识别与室一起使用的mdi。假设这个信息已知,mdi的阻力文件(压力对流的曲线)可以从预定义数据库中读取,并且如图47所示,使用差动压力测量,比较压力传感器78所检测的mdi的嘴部处的压力与大气压,经过mdi本身的流可以被计算。
156.3.2.2.模制的mdi适配器启动件(插入有罐)
157.由于大部分mdi将具有相互不同的阻力文件,罐可以自启动件移除,并被放置到内置容器,或后端组件,内置容器被模制到mdi适配器中。该适配器将允许所有mdi罐被插入,并允许气溶胶进入室。然后,针对系统的需求,即线性p0曲线、低迟滞率和从部分到部分连续,具体设计对mdi适配器的流的阻力。
158.3.3.旁路中穿过孔的差动
159.3.3.1.如图3、图9、图49和图50所示,旁路通道60存在于室壁或嘴部/面罩适配器的内部,并且这个通道与气溶胶室流体连通。在吸入期间,一些流经过这个旁路通道并经过精确控制尺寸的孔110而被拉出。对这个孔的流的阻力可以完全被定性,并且使用压力传感器78的穿过孔110的差动压力测量可以用于计算经过孔和旁路通道的流。经过室的流速将被校准成经过旁路通道的流,使得使用期间的旁路流测量可以表示经过vhc的总流。压力传感器78与计算机500和处理器502通信。
160.3.4.文式管
161.3.4.1文式管112使用流路径的局部收缩,以在流体经过时加速流体。由于流体速度增大,相对于收缩的较小移动流体上游的压力,其压力下降。差动压力传感器可以检测这种差,并且用文式管几何学,流速可以被计算。
162.分别如图51a
‑
图51c所示,文式管112可以被制成室壳体2的一部分、嘴部12的一部分或旁路流路径60的一部分。压力传感器78与计算机500和处理器502通信。
163.3.5.皮托静管
164.3.5.1.皮托静管114包括一端闭合的管,并用于比较管内的压力与周围流体压力。由于快速移动的空气进入皮托管114,其在管内滞留并产生与流体流的初始速度成比例的压力。
165.如图52所示,皮托管可以被制成或组装到带阀保持室的挡板116上,从而在吸入期间采样最快移动的空气。用室几何,该速度可以被转换成流速估计。压力传感器78检测压力差,并与计算器500和处理器502通信。
166.4.基于声音的方法
167.对于所有基于声音的方法,第二个麦克风可以用于检测环境噪声。这个信息可以用于降低由微控制器或其他处理器502处理的信号中的噪声。
168.4.1.基于量
169.4.1.1.内部声音
170.当空气流过mdi和带阀保持室时,产生声音的湍流被生成。在越高流速处,生成越多湍流,声音越大。尽管未过滤的基于量的方法将易受环境噪声的影响,但是监测室内的音量可以提供估计流速的方式。
171.麦克风82被放置在室壳体的内部空间中,例如,与适配器或后端组件连接(例如,请看图24),或沿着室放置或放置在挡板处(例如,请看图59c)。该同一麦克风可以用于mdi启动检测。
172.4.1.2.声音生成
173.麦克风被放置在与实施例4.1.1中的点相似的点。如图58和图59a
‑
图59b所示,在流经过时,振动簧片115或簧片84,边缘音调或开管或闭管上的流可以用于生成声音。并且这个音量可以大大地大于室本身中所存在的音量。麦克风82与计算机500和处理器502通信。
174.4.2.基于低通、高通和带通滤波器的量
175.如实施例4.1.1中所述,基于量的方法易受由于环境噪声引起的错误读数的影响。为了降低这种风险,数字和/或模拟滤波可以被实施,使得系统仅有效地“监听”特定频带。这些滤波器将被选择,使得室内固有的声音被监听到,或者在声音生成的情况下,这些频率被监测。
176.4.3.基于算法
177.无论这些声音是产品所固有的还是通过簧片或其他声音生成源的方式所产生的,不同流速时来自于室的声音,对系统而言是很独特的。不同的算法可以用于定量地比较输入麦克风信号与从该装置内所定义的流速时所预记录的信号范围。
178.4.4.声音的传送时间(time of flight,tof)
179.如图64所示,在这种情况下,声音的tof是指声音从一个声音收发器118传播到另一个所花费的时间。收发器1(即t1)位于收发器2(即t2)的下游,这两个收发器可以均位于室的内部或外部。当声音从t1传播到t2时,由于与经过室的空气流逆传播,其被有效地减慢。相反地,当声音从12传播到ii时,由于与流一起移动,其比正常时传播更快。已知相对于流方向的收发器118或超声波换能器的角度0以及从11到12和12到t1的tof,用室的几何,可以估计平均流速度以及流速。虽然需要人听觉范围(>20khz)之外的声音,但是任何频率的声音都可以。收发器118与计算器500和处理器502通信。
180.4.5.多普勒
181.多普勒超声使用反射波相对于发射波的频率偏移,以推断反射体移动时的速度。使用悬置的气溶胶颗粒作为反射体,多普勒原理可以用于确定平均颗粒速度并估计流速。这种方法仅将检测在气溶胶存在时的流,从而其也可以用作其他剂量保证工具。
182.如图53所示,超声波换能器118可以被放置在挡板116中,其中声音指向mdi适配器或后端组件8;被放置在mdi适配器中,其中声音指向挡板或之间的任何位置,只要声音产生不垂直于空气流。收发器/换能器118与计算机500和处理器502通信。
183.5.基于光的方法
184.5.1.具有夹缝的阀中的内部反射
185.如图60所示,发光二极管(light
‑
emitting diode,led)122或其他光源和/或对来自于led的光波长敏感的光检测器124被放置在阀16内,其中这两个均指向阀开口126。该阀为具有可变尺寸的开口的类型,其中开口尺寸取决于经过该阀的流速。鸭嘴阀、交叉阀和任何模切阀均是较好的示例,但是这个列表不是排他的。如图56和图57所示,光检测器124可以被放置在阀的外部。
186.在操作期间,光源在阀26的内部/背部发光,如图60所示,该阀反过来反射一些光回到光检测器,或者如图56和图57所示,该阀让光通过以由光检测器接收。当该阀闭合时,来自于光源的大部分光被反射回到光检测器(内部)或不由光检测器(外部)接收。当阀打开
时,更多的光能逃出去,并且因此更少的光被反射回到光检测器(内部),或者相反由光检测器(外部)接收。通过监测来自于光检测器的信号,阀打开的程度与经过阀的流可以被估计。使用形状和颜色以一种方式设计阀,以将反射的光聚焦在光检测器,达到其开口的一定程度。光检测器124与计算机500和处理器502通信。
187.物理屏蔽可以被放置在阀内。led可以具有可调节的亮度,使得在初始校准阶段,通过用来自于光检测器的反馈迭代增加led的亮度,或者选择不容易被所使用药物吸收的光波长,实现相同基准线信号。虽然由气溶胶最小吸收或反射的波长是较优的,但是在本方法中,可以使用任何波长。高通滤波器也可以被实施,以去除来自于dc电源(闪光灯或太阳光)的信号贡献以及低功率电光,例如,北美的60hz(120hz)的光和世界各地的等效频率。
188.可选地或除了高通滤波之外,光源的亮度在特定频率处是可变的,并且使用频率检测算法,该信号将被分析以用于流。在这种情况下,与光源的频率匹配的信号的频率分量的振幅将随着阀打开和闭合而分别降低和增大。
189.5.2.带有狭缝的阀中的发光
190.5.2.1.外部光源
191.如图61所示,光源122位于部分5.1中公开的实施例中的类型的阀16的外部并且指向阀门16,其中光检测器124保持在指向光源的阀的内部。在本实施例中,阀打开开口126越多,越多的光到达光检测器。如5.1中一样,类似的方法适用于本实施例,包括过滤和频率编码以及一些5.1s对药物干扰的脆弱性。光检测器124与计算机500和处理器502通信。
192.5.2.2.体热(红外)
193.类似于部分5.1和部分5.2中公开的实施例,并如图62所示,红外光检测器128位于5.1和5.2中所述的类型阀16的内部。与5.2类似,当阀16打开时,允许更多的光到达光检测器128。在该实施例中,光检测器被选择,使得其对人体发射的红外波长最敏感。当红外不透明的阀打开时,自用户嘴吧(嘴部装置)或面部(面罩装置)发出的更多红外光进入,并由光检测器或光电二极管吸收。光检测器128与计算机500和处理器502通信。该信号由微控制器分析。
194.5.3.振荡体
195.如图63所示,光源122和光检测器124彼此面对,其间具有不透明体96。
196.不透明体可以自由移动,从而其可以阻挡来自光源的光到达位置1处的检测器,并允许光到达位置2处的检测器。
197.该不透明体设计成当流动存在时振荡,并且其振荡对于不同的流速是独特的。这些振荡的振幅使得达到位置1和位置2。振荡体可以是由硅树脂或塑料制成的簧片、移动叶片、旋转叶片或松散或硬质材料的拍打片,类似于旗帜。这不是排他的,因为任何振荡体都可以。然后,连续分析来自光检测器的信号,并推断出相应的流速。光检测器124与计算机500和处理器502通信。
198.6.弹簧位移
199.以下实施例依赖于弹簧的运动(线性或非线性,拉伸或压缩),以响应吸入压力或吸入流速。当弹簧从一个位置移动到另一个位置时,其会带来或激活如下一系列传感硬件:
200.6.1.霍尔效应
201.磁铁被放置在弹簧的可移动端上,其中霍尔效应传感器位于固定位置。当磁铁从
一个位置移动到另一个位置时,霍尔效应传感器检测磁场的变化,并且这可以使用各种算法进行分析以确定流。
202.6.2.电容
203.带电板被放置在弹簧的可移动端上,带相反电荷的板位于固定位置,由空气(介质)隔开。当弹簧上的带电板移动时,电容发生变化,并且这可以使用各种硬件和软件方法进行检测。
204.6.3.簧片开关
205.磁铁被放置在弹簧的移动端上,并且一组或磁簧片开关沿弹簧的长度设置。当弹簧偏转并带有磁铁时,不同的簧片开关闭合,并且通过确定哪些开关打开与闭合,弹簧的位置和流速可以被近似计算出。
206.6.4.电感式传感器
207.导电板被放置在弹簧的可移动端上,其中感应线圈产生,并且电磁场非常接近。随着线圈和板之间的距离变化,系统的电感变化,这可以通过软件分析。这又可以用于估计弹簧的位置,从而估计流速。
208.7.针轮风速计
209.7.1.针轮被放置在室内,使得其旋转速度随着流速的变化而变化。通过旋转接触开关、光幕或磁体的周期性断开或磁与霍尔效应传感器组合,可以监控针轮的旋转速度,并且该速度可以用于近似出经过室的流速。
210.8.加热表面
211.8.1.热线风速计
212.通过在其上施加恒定电压,电线或网被加热。当空气穿过该电线时,其冷却,并且其电阻下降。由于电压保持恒定,通过电线的电流增加,这可以由电子设备监测。然后,流过电线的电流量可以用于推断流速。
213.8.2.薄膜流传感器
214.这与热线风速计的原理相同,只是其是不具有侵入性。将薄膜加热的传感器被放置在室内的表面上,并且流过传感器的电流量用于确定流速。
215.9.压电挠性传感器
216.9.1.基于偏转
217.当气流与物体接触时,物体对空气施加力以改变其围绕物体的方向。同时,空气赋予相同大小的力,但方向相反。使用该原理,可以使用压电挠性传感器,使得当空气撞击其表面时,它被迫偏转,并且偏转量将与撞击传感器的流量成比例。压电材料在应变下产生电压,因此可以使用各种算法检测和分析应变。更大的应变是更高流速的标志。
218.9.2.基于振荡
219.当发生边界层分离时,在钝物体周围流动的空气可以以特定频率产生涡流。该涡旋脱落可以引起物体本身的振动,并且如果该物体由压电材料制成,则可以以与振荡体的频率匹配的频率产生电压。可以分析该信号,并使用各种算法推断流速。可选地,为了放大该信号,可以使用各种物体,这些物体在相同的流速下引起不同频率的涡旋脱落。当脱落频率与物体的共振频率匹配时,将引起更容易检测和分析的较大振幅振荡。
220.10.多级接触开关
221.10.1.可以在不连续的步骤中闭合不同的开关。可以将多个印刷导电通路印刷到柔性表面上,并且在弹性件的不同位置处闭合不同的开关。基于哪些路径是闭合和打开的,可以估计该件的位置,并因此估计流速。
222.11.电位计叶片
223.11.1.使用如实施例9.1中所述的由流产生的力,叶片可以被设计,使得其在流存在时调节电位计。偏置弹簧将使得叶片的位置取决于存在的流。可以连续监测电位计的电阻,并且基于该测量推断出流。
224.mdi启动检测
225.mdi启动的检测是重要的信息,其可用于剂量保证,并用于向用户提供关于优化其呼吸技巧的反馈。如下面的各种实施例中所述,mdi的若干特征可以由启动检测器使用并检测,以检测mdi启动,包括气溶胶羽流的视觉外观、声音、与hea推进剂快速蒸发相关的温度下降、其发射力、气溶胶的介电常数、发射位移,启动时的压力或与mdi本身的智能功能的通信。
226.1.基于光的方法
227.1.1.光传输(aka光幕)
228.如图7和图8所示,在一个实施例中,光源(例如,蓝色led)39和光检测器(光检测器)32间隔设置,并且被定位,以使得光源被指向至该检测器,其之间具有空气间隙,或者使得来自光源的光可以由启动检测器检测。可见光谱和/或红外光谱中的任何波长可用于检测mdi启动。该空气间隙足够大,使得当mdi被启动时,气溶胶羽流受到光源和检测器的存在的最小阻碍。随着气溶胶羽流在光源和检测器之间传播,当气溶胶散射并反射光时,从光源到达检测器的光量将减少。结果是来自检测器的输出的突然变化,检测器的信号可以通过各种软件算法进行分析。特别地,气溶胶药物颗粒在室的内部空间内以不同程度散射、反射和/或吸收蓝光。光的变化由光检测器进行探测,光检测器将信号传送给处理器。当内部空间中不存在气溶胶时,光检测器记录接收光的基准线读数。当存在启动时,由于光散射/反射/吸收,光检测器接收更少或更多的光。基于这些参数,智能vhc可以准确地确定mdi启动。该事件可以进一步用于记录时间戳,该信息可以用于粘附跟踪和监视。如图8所示,如时间线上的周期性尖峰所证明,光检测器随时间的输出显示出可靠的启动指示。
229.光源的波长可以是任何波长,并且理想地来自红外带宽,使得光不可见并且分散用户的注意力。光检测器的灵敏度应使得其对从光源发出的光最敏感。理想光源具有红外(波长为700nm至1mm)或可见光(波长为400nm至700nm)光谱的波长,并且是有效的发光二极管的形式。
230.理想的光检测器对光源的波长具有最高的灵敏度,可包括光电二极管,光电晶体管或光敏电阻器(light
‑
sensitive
‑
resistor,lsr)。
231.1.2.光反射
232.光源和光检测器被定向,以使得当存在反射体或介质时检测器将仅接收来自光源的光。当存在气溶胶羽流时,来自光源的光被反射,并且该反射光的至少一部分被检测器吸收。检测器处的光吸收峰值而导致电压变化,电压变化可通过各种软件算法进行分析。光源和检测器应具有与光传输实施例中所述的相同的属性。
233.1.3.颜色反射
234.白光源和颜色传感器被定向,以使得颜色传感器仅在白光被反射离开物体或介质之后才接收光。当存在气溶胶羽流时,其反射一些波长的光,同时吸收其他波长。所有反射波长的组合将决定可由颜色传感器检测的气溶胶羽流的颜色。传感器可以检测光水平的突然变化以及颜色的突然变化,这些变化可以使用各种软件算法分析以检测mdi启动。
235.1.4.摄像机和图像处理
236.摄像机和图像处理工具用于广泛的应用,气溶胶羽流的识别可以是一种应用。可以使用各种软件算法。
237.2.基于声音的方法
238.如图24
‑
28所示,vhc或与其连接的后端组件8被配置有麦克风82(启动检测器)、音频接口、视觉反馈指示器40、微控制器(其可以是处理器502)、存储器存储504、限位开关、蓝牙/wi
‑
fi连接和电池503,所有这些均容纳在后端组件8中。限位开关62检测到mdi的存在,这触发电子系统上电。麦克风和音频接口记录内室内的声音。当mdi被启动时,启动的完整声波被麦克风82捕获,并存储到存储器中以用于分析。
239.对于所有声音实施例,可以使用第二个麦克风来拾取环境噪声。然后,来自该麦克风的信号可用于所分析的信号中的降噪目的。
240.2.1.麦克风
‑
简单的音量阈值
241.麦克风位于mdi的嘴部附近,并且至少部分地与来自外部环境的声音隔离。在mdi启动期间,当药物从mdi孔流出时产生相对较大的声音,并且可以使用各种软件算法检测该体积峰值。
242.2.2.麦克风
‑
具有预过滤的音量阈值
243.由于来自环境的任何没有被隔音充分阻尼的较大声音,简单的音量阈值方法会受到误触发。为了进一步降低误触发的风险,可以将音量阈值与对输入麦克风信号进行预滤波相结合。
244.在mdi启动期间产生的声音由各种声音频率组成。使用低通、高通或带通滤波器,可以调谐麦克风信号,使得仅与mdi启动相关联的频率被监听。这限制了误触发到mdi启动的声音带宽内的较大声音的可能性。
245.麦克风位于mdi的嘴部附近,并且至少部分地与来自外部环境的声音隔离。麦克风的输出信号通过一系列精心选择且以一种方式被排列以构造低通滤波器和/或高通滤波器的电阻器、电容器和/或电感器。在经过这些滤波器之后,该信号由微控制器分析(图28)或其他处理器502,以用于可以使用各种算法而检测的音量尖峰。频率滤波也可以数字方式完成。
246.2.3.麦克风
‑
目标信号比较(已过滤和未过滤)
247.两种方法(2.1.和2.2.)由于较大的环境声音而受到误触发。代替或结合简单的音量阈值,输入声音与预定义目标之间的定量比较几乎可以消除误触发的风险。自相关和最小化均方根是基于时域的一些算法,其可用于信号比较,并且这些中的两个可以与2.2中所述的模拟滤波器或数字滤波器组合,或者根本不进行滤波。频域算法也可用于比较源与目标。
248.3.温度变化方法
249.3.1.温度传感器和直接接触蒸发
250.mdi通常含有推进剂,例如氢氟烷烃(hydrofluoroalkane,hfa),其具有低沸点。在mdi启动期间,一些推进剂能够在其液相中逃离mdi。当这种液体推进剂暴露在外部环境中时,其由于其低沸点和周围大气中推进剂的最小蒸气压而迅速蒸发。通过蒸发冷却,在液体推进剂与之接触的所有材料中,温度快速下降。
251.如图38和图39所示,vhc和/或mdi的一个实施例被配置有一个或多个温度传感器140(启动检测器),例如连接到或嵌入到保持室的壁中,或者设置在其内部空间中,例如,在室壳体的输出端处的吸入阀或挡板上。温度传感器可以是温度敏感电阻器、热电偶、热敏电阻或红外温度传感器,以检测温度的快速下降和后续的升温。可选地,仅温度的快速下降就足够了。使用各种软件算法,可以检测这种温度快速下降和/或重新升温。在该实施例中,温度传感器被放置在气溶胶羽流的路径中,从而一定量的液体推进剂被沉积在其表面上。注意从处于气溶胶路径中传感器避免任何实质性药物损失。具有最小热质量的传感器是促进快速检测温度变化的理想方式。如图39所示,各种最小羽流温度(minimum plume temperature,mmpt)可与各种mdi制剂相关。然后,可以将温度数据输入到微控制器或其他处理器502(未示出)以指示并记录mdi启动。
252.3.2.温度传感器和空气温度
253.3.1.的实施例要求在mdi启动期间温度传感器处于气溶胶路径中。可选地,可以监测空气温度的快速下降,因为推进剂的蒸发也会导致周围空气温度的降低。例如,如图38所示,传感器140可以位于保持室的内部空间的外部,例如在mdi上。这将允许使用温度的mdi启动的非侵入性方法。温度传感器的位置应该接近mdi,因为随着距离mdi的距离增加,温度下降的幅度减小。这是大多数推进剂在长距离传播之前蒸发的结果。还可以使用沿室放置的多个温度传感器来评估在距离mdi的不同距离处的温度或温度的分布与距离之比,以更可靠地检测mdi启动。
254.3.3.mdi上的温度传感器
255.如图38所示,在启动之后,推进剂不会处于相平衡状态。这导致一些液体推进剂蒸发直至发生饱和,并平衡被恢复。蒸发导致罐的温度下降,这可以使用接触温度传感器或实施例3.1中提到的任何其他传感器来检测。这可以集成到mdi适配器中,或者将计数器添加到mdi罐上,mdi罐具有无线通信功能以与mdi适配器通信。然后,可以将温度数据输入到微控制器或其他处理器502(未示出)以指示并记录mdi启动。
256.4.发射的力
257.4.1.本地力峰值检测
258.如图40
‑
42所示,位于mdi启动件顶部或底部的力敏电阻器(force sensitive resistor,fsr)或启动检测器可用于确定力测量并检测mdi的启动。如图42所示,当观察到力与启动件中的罐的位移的曲线时,可以在启动点处存在峰值或其他信号变化,其可以使用fsr和各种算法来检测。除了fsr之外,还可以使用几种类型的力传感器,包括应变计、弹簧位移、压电柔性传感器等。如图40所示,力传感器160位于后端组件8的支撑凸缘上。在图41中,力传感器160位于帽164上,帽164通过系绳162连接到后端组件,并固定到容器28的顶部,其中,在mdi启动期间,其由用户进行接合。力传感器160将信号传送到计算机500和处理器502。
259.4.2.力阈值
260.尽管用简单的力阈值,确定性较低,但也可以使用这种方法,而不是峰值检测器。
261.5.电容变化
262.5.1.影响电容器106的电容的一个因素是两个带电表面之间的材料的介电常数。假设医用气溶胶的介电常数不同于空气的介电常数,则可以使用集成电容器的电容变化来检测mdi启动。如图43和图44所示,电容器将具有打开的空气间隙,该空气间隙容易被来自mdi的气溶胶渗透。如图43所示,电容器可以位于输出端,或如图44所示,位于输入端。然后,使用振荡电路或充电/放电电路监测电容的变化,该电路的频率的突然变化将发出mdi启动的信号。这可以使用各种软件算法来检测。电容器与计算机500和处理器502通信。
263.6.发射的位移
264.6.1.磁帽和簧片开关
265.如图45a和图45b所示,罐盖170牢固地安装在mdi罐上,处于与剂量计数器相似的位置,并且在启动期间与罐一起行进。通过在其结构中嵌入永磁体,该盖具有磁性,在其上印刷磁性墨水或由磁性材料制成。在mdi适配器内是霍尔效应传感器或簧片开关172。当mdi罐被压下到其启动位置时,簧片开关闭合,这由软件检测。使用霍尔效应传感器,可以分析平稳状态的信号,这意味着可以触底mdi罐,或x的变化,以及启动点。传感器与计算机500和处理器502通信。
266.6.2.导电帽和电感器
267.与实施例6.1.相似,帽与vhc一起出售。在该实施例中,帽具有导电性,并且不一定是磁性的。振荡电磁场由室内的电感器产生,该电感器在mdi罐盖中感应出电流。随着帽在启动期间移动靠近电感器,系统的电感发生可检测并分析的变化。一旦达到信号中的平稳状态,表示罐触底,则可以通过软件记录启动。
268.7.压力检测
269.当mdi被启动时,其加压内容物被迫离开喷嘴并进入vhc。如图18所示,伴随此的压力波可以通过放置在室内或mdi本身的嘴部附近的压力传感器78来检测。特别地,一个或多个压力传感器78被设置在室的内部空间中的壁的内表面上或沿着室的内表面设置。如图20所示,压力传感器输出与时间示出了何时发生启动,如尖峰所示。
270.如图46和图47所示,压力传感器78可以被设置在内部空间中的保持室的输入端或输出端。传感器检测并记录压差。
271.如图48所示,一个或多个流通道84与支撑块86相邻设置,其具有排放孔88。环境空气经过流通道被带入,流通道提供已知阻力的流路径。压力传感器78记录压力差。
272.如图49和图50所示,在旁路通道中形成限制孔。可以通过压力传感器检测并记录穿过限制孔上的压降,然后,将其与流速相关。各种压力传感器与计算机500和处理器502通信。
273.8.与智能mdi的通信
274.8.1如图78所示,mdi可以被配置有剂量计数器模块90,其已经被启动以用于依从性监测的目的,并且捕获剂量启动时间、计数和总量。同时,vhc可以被配置有流检测模块92,其捕获吸入时间、持续时间和计数,这些模块使用诸如蓝牙技术进行通信。来自智能vhc或其应用的这些装置的通信可以用于检测和确认mdi启动和技巧。
275.如图13所示,通过从放置在mdi罐顶部的发射器221接收单个来检测mdi的启动。一
旦启动时,发射器输出由智能vhc接收的信号。例如,安装在罐顶部的压电盘,集成到与容器连接的剂量计数器,或作为单独的元件,在被按压以给发射器供电时产生足够的电压。几种类型的发射器/接收器是可能的,包括ir led/光电二极管、rf tx/rx或音调发生器/麦克风。根据tx/rx的类型,使用用于控制器吸入器/救援吸入器的不同的rf频率,该系统还可用于识别mdi类型。
276.mdi插入
277.向用户提供已正确插入mdi的反馈和确认是智能vhc的必要功能。另外,取决于所使用的方法,该功能可以控制微控制器或其他处理器502何时处于睡眠状态,进一步延长该装置的电池寿命。例如,当插入mdi时,微控制器唤醒电源,并从电源汲取更多电流,以给其传感器、显示器和通信供电。一旦移除,微控制器就会回到低能耗状态。
278.1.开关
279.1.1.限位/接触开关
280.在该实施例中,如图19所示,以一种方式,即在插入mdi时开关闭合,限位开关62(机械)或接触开关被放置在后端组件8内。插入mdi时,限位开关完善电路。该开关的闭合触发微控制器或其他处理器502中的中断,并允许其在其完全操作状态下操作,此时通过视觉或音频提示通知用户mdi已被完全插入。当移除mdi时,开关断开,提示微控制器返回低能耗状态。在一个实施例中,如果该装置在预定时间段(例如,大约30到120秒)内是不活动的,则微控制器可以进入休眠模式。预定时间段可以由用户设置/编程。
281.除了接触开关之外,且如图11所示,可以使用按钮来打开/关闭系统。可以使用各种led、扬声器和触觉和/或视觉显示器/指示器来实现视觉或听觉指示器,例如灯和/或警报器。
282.1.2.簧片开关
283.类似于实施例1.1,并如图74所示,用磁性墨水、电磁铁或永久磁铁,mdi的一部分200被磁化。当插入mdi时,簧片开关202闭合。如1.1中所述,该开关的闭合和打开对于微控制器操作和用户反馈具有相同的结果。
284.1.3.导电路径
285.在该实施例中,如图75所示,mdi的一部分,例如嘴部,具有导电路径204,其在插入mdi适配器时,完善mdi适配器电子器件内的电路206。如1.1中所述,该电路用于向用户提供反馈,并使能微控制器的完整功能。
286.2.光幕
287.2.1.如前所述,光幕可用于确定mdi插入到mdi适配器中。在该实施例中,led和光电二极管穿过mdi适配器开口彼此相对放置。当没有插入mdi时,来自led的光能够到达光电二极管。一旦插入mdi,该光传输就被中断,这可以由微控制器检测并用于向用户提供听觉或视觉反馈,确保正确插入mdi。
288.3.嘴部形状的检测
289.3.1.应变计
290.如图70所示,当材料变形以为了适应mdi嘴部形状时,在mdi适配器或后端组件中引入应变。使用应变计206可以测量应变量。监测mdi适配器的应变力可以提供一种检测mdi是否已插入mdi适配器的方法。一旦应变达到某个阈值,系统就可以向用户提供反馈以确认
mdi插入。
291.3.2.力敏电阻(force sensitive resistor,fsr)
292.如图72所示,力敏电阻器208可以被放置在mdi适配器或后端组件8上或其内。一旦mdi插入,mdi嘴部对fsr施加力,该力产生由微控制器评估的电压变化。根据来自fsr的信号,可以断定mdi的插入,并将该信息转发回到用户。
293.3.3.线性动作电位计
294.如图69和图71所示,线性动作电位计210可以被放置在mdi适配器或后端组件上或其内。一旦插入mdi,电位计被移位,这产生由微控制器评估的电压变化。根据来自电位计的信号,可以断定mdi的插入,并将该信息转发回到用户。
295.3.图像处理
296.4.1.可以使用摄像机或一系列摄像机来确定mdi已插入到mdi适配器中的程度。各种图像处理算法可以用于确定这一点,并且一旦确认,该信息可以被转发回到用户。
297.电源和分布问题识别
298.所有实施例都需要使用电力来实现功能。各种电源可以单独使用或与其他电源组合使用。即使在单独的室组件上,传感器和反馈方法也可以接收功率。
299.电源
300.1.电池(每个可以使用一个或多个电池)
301.1.1.永久,一次性
302.电源可以是这样的:一旦电池耗尽,就丢弃整个电子装置。电池将永久地封闭在电子器件主体内,从而限制进入而不损坏装置。
303.1.2.可更换
304.电源可以是这样的:一旦电池耗尽,用户能够进入电池盒,并用完整电池替换耗尽的电池。这类似于许多儿童玩具或手表的电池。
305.1.2.可再充电
306.电池可以是可再充电的,从而一旦电池耗尽,用户可以简单地通过dc电源插孔、usb或其他方法对电池进行充电。另外,电池可以在其整个寿命期间进行涓流充电,这可以延长其耗尽时间。涓流充电是指以非常小的电流连续或周期性地给电池充电。单独地,这种类型的充电将花费很较长时间来为耗尽的电池完全充电,但是它对于延长电池寿命是有用的,尤其是在连续充电时。
307.2.光伏电池
308.2.1.光伏电池响应光产生电压。这可以用于根据传感器和功能的功率要求直接为设备供电,或者为电池或超级电容器再充电。
309.3.整流天线
310.3.1.整流天线使用来自无线电传输、移动通信、wi
‑
fi网络等的环境射频能量,以感应天线内的小电流,这些小电流以一种其可用于对可再充电电源进行涓流充电的方式,经过整流和管理。
311.4.摇动以充电
312.4.1.在导电线圈内集成自由移动的磁铁将允许系统在振动该设备或通过其他方式迫使磁铁移动时,在导电线圈中产生电流。磁铁的移动在线圈中感应出可用于给电池或
其他电源充电的电流。
313.分布
314.优选的是,所有电子元件彼此靠近,以使得电源分布更容易管理。然而,考虑到装置的要求,这可能是不可能的。在某些电子件安装在mdi适配器中而其他电子件朝向嘴部或面罩适配器安装的情况下,存在一些电源分布策略。
315.1.沿着主体的导电路径
316.1.1.该方法仅使用位于嘴部/面罩适配器或mdi适配器中的一个电源(例如一个电池),其功率通过主体传递到另一个组件。在每种情况下,主体两端的触点确保功率可靠地传输到其他组件。触点以一种方式被形成,即仍允许装置的装配和拆卸以进行清洁,同时在每个组件上提供可重复且牢固的连接。这些导电路径还用于前端硬件和后端微控制器之间的数据通信。
317.1.1.1导电树脂
318.导电树脂可用于将导电通路直接模制到主体组件中。这将通过双射或插入成型制造方法来完成。
319.1.1.2导电油墨
320.导电油墨可以用于形成导电路径,并且可以是焊盘印刷或丝网印刷到主体上。
321.1.1.3柔性电子件和粘合剂
322.可以使用柔性的低轮廓线,并且这些线可以通过使用粘合剂固定到主体上。
323.2.无线通信的双电池
324.2.1.位于vhc的嘴部/面罩适配器端的硬件可以由与位于vhc的mdi适配器端的电源完全独立的电源(例如电池)进行供电。室的每一端可能需要其本身的微控制器或其他处理器502来处理位于那些相应端的输入和输出。在这种情况下,两个微控制器很可能需要进行通信以共享数据。这可以通过蓝牙或其他方式完成。
325.mdi识别
326.mdi的识别为病人、开处方者和付款人提供了保证,即批准的药物治疗方案也得到了依从。另外,其可用于警告病人是否已将错误的药物插入到室中,这可有助于防止特定药物的过量和不足剂量。下面的识别方法可以单独使用,也可以组合使用以确信mdi。
327.例如,并如图13所示,光电二极管222和颜色检测器传感器224或mdi识别器可以被设置在室壳体的壁的外表面上,或者被设置在后端组件上,并且朝向mdi,包括启动器启动件和容器。唯一标签226被附加到每个mdi上,或者唯一救援标签可以被附加到救援mdi,并且唯一控制器标签被附加到控制器mdi。传感器224(例如,颜色检测器传感器)检测标签的存在以识别每个特定mdi或者按类别识别每个mdi,例如救援或控制器。标签可以被配置有不同的颜色,条形码,磁性,表面特性,如反射/吸收等。
328.1.mdi启动件的颜色感测
329.1.1.嘴部颜色
330.如图68所示,mdf有各种不同的颜色,有些具有两种颜色,以区别嘴部和手柄。通过从mdi的嘴部部分获得特定的颜色代码读数(例如rgb,cmyk,l*a*b*),可以使用颜色感测来帮助识别插入到mdi适配器的mdi。当mdi被插入到适配器时,颜色感测硬件或传感器224(mdi识别器)被触发以从mdi的嘴部收集颜色信息。然后,通过软件分析该颜色代码,并与
mdi数据库及其各自的颜色代码进行比较。可以使用各种算法进行比较,并将最接近的匹配用于mdi身份。可选地,mdi启动件颜色代码可以被用作多因子算法的输入,该算法使用若干输入来识别mdi。
331.1.2.手柄颜色
332.如图68所示,类似于嘴部颜色感测,但不是设置颜色传感器224以获得嘴部颜色代码,其被设置以分析mdi启动件的手柄部分的颜色。
333.1.3.嘴部颜色和手柄颜色
334.结合1.1.和1.2.有助于区分双色mdi启动件。
335.2.气溶胶羽流的颜色感测
336.2.1.在所有mdi中存在许多规格,这可能反映在气溶胶羽流的不同颜色代码中。颜色感测硬件被放置在mdi适配器内的mdi启动件的嘴部附近,并且在mdi启动期间,收集气溶胶羽流的颜色代码,并与各种mdi的数据库进行比较。可以使用各种比较算法,其中最接近的匹配用于mdi识别。可选地,气溶胶颜色代码可以被用作多因子算法的输入,该算法使用若干输入来识别mdi。
337.3.嘴部形状检测
338.3.1力敏电阻(force sensitive resistors,fsr)
339.如图72所示,fsr 208被放置在mdi适配器中,使得在mdi插入期间,电阻器在该特定方向上由mdi嘴部的尺寸成比例的量进行压缩,从而导致其信号相应地变化。其电阻值与数据库中的mdi进行比较。可以使用各种比较算法,其中最接近的匹配用于mdi识别。可选地,电阻值可以被用作多因子算法的输入,该算法使用若干输入来识别mdi。
340.3.2应变计
341.如图70所示,有意地使mdi适配器端口尺寸过小,使得其必须在插入mdi时伸展。可以分析由应变计208检测到的总应变和高应变与低应变的位置,并将其与不同mdi及其应变值的数据库进行比较,以帮助识别mdi。
342.3.3.如图69和图71所示,且线性动作电位计210,类似于fsr方法,通过线性运动而调节的电位计是根据mdi嘴部在特定方向上的尺寸进行调节的。系统在mdi插入时所收集的电阻值与存储在各种mdi的数据库中的值进行比较。这些电位计具有偏置弹簧,以便在移除mdi时返回到其原始位置。
343.4.嘴部长度
344.4.1.触觉或滑动电位计
345.mdi的嘴部部分的长度可以用作区别因素。
346.如图69所示,在完全插入mdi适配器后,嘴部的长度可以通过触觉或滑动电位计进行测量,并与存储在系统数据库中的各种长度进行比较。
347.5.对流的阻力
348.5.1.对流的阻力
349.如图54和55所示,如本文所公开,经过室的流可以通过各种传感器进行监测。该流可用于帮助识别mdi。使用该流信息与来自差动压力传感器78的数据相结合,比较mdi嘴部处的压力与大气压力,可以收集mdi的压力与流的曲线。将此曲线与mdi数据库中的曲线进行比较,可以找到匹配项,其可以识别mdi。可选地,电阻分布可以被用作多因素算法的输
入。
350.6.特定流速下的mdi声音
351.如图24
‑
28所述,音频接口包括均衡器电路(例如,7频带),其将音频频谱划分为七个频带,包括例如但不限于63hz、160hz、400hz、1khz、2.5khz、6.25khz和16khz。这七个频率被峰值检测,并被多路复用到输出,以提供每个频带的振幅的表示。微控制器处理这些频带,以将这些频带平均到单个振幅(db)对时间的信号(图25)。然后,可以将由不同频带mdf产生的独特声音与存储器或云数据库内的存储的已知声音进行比较。使用归一化相关,可以将输入声音与具有较高确定性的参考声音进行比较。在mdi启动时捕获并存储启动声音,并且可以在治疗之后处理比较和确定,以便在治疗期间或治疗期间根据可用的处理能力释放用于其他vhc任务的处理能力。如果处理足够快,则可以实时分析mdi启动,并由于所产生的较低或不够的声音而提供关于mdi喷嘴或支撑块是否被堵塞或部分堵塞的反馈。该反馈还可以包括关于mdi是否需要被摇动和/或引发,或检查以进行足够的剩余剂量计数的信息。
352.6.1.可以生成包含特定流速下所有mdi的频谱或主频的数据库。在使用中,当达到该流速时,通过麦克风对声音进行采样,并将其与存储在系统数据库中的声音配置文件进行比较。可以使用各种算法进行该比较。
353.7.启动时的mdi声音
354.7.1.可以生成包含所有mdi启动声音的频谱或主频率的数据库。当发生启动时,将记录的声音定量地与存储在系统数据库中的声音进行比较,并确定最接近的匹配。
355.8.敲击时的mdi声音
356.8.1.可以生成数据库,其包含敲击或锤击时所有mdi声音的频谱或主频率。在插入到mdi适配器时,触发机械锤,从而其撞击嘴部区域中的mdi。所产生的声音取决于mdi启动件的形状、体积、刚度以及其与mdi适配器的适配度。然后,可以将此声音定量地与系统数据库中的声音进行比较。
357.9.图像处理
358.9.1读取标签
359.使用文本识别软件“读取”mdi启动件和/或mdi罐上的文本。例如,并如图4所示,摄像机35或其他图像传感器(mdi识别器)被安装在室壳体上,例如,与其输入端或输出端相邻设置,或者位于其之间的任何位置处。图像传感器还可以与嘴部组件或后端组件连接。摄像机或图像传感器捕获mdi的图像,包括与容器和/或启动启动件连接的标签240上所呈现的各种文本信息。可以使用图像处理算法和/或机器学习技术来提取文本信息、独特形状和/或独特特征,其揭示与vhc相关的mdi的类型和标识。所捕获的图像可以进一步被存储在存储器中,并与数据库中的不同类型的mdf进行比较,以缩小选择范围。如图5a、图5b和图6所示,摄像机或图像传感器捕获mdi的图像,并转换为如图5b所示的灰度图像242。然后,处理器从捕获的灰度图像中提取多个模板(例如,三个),并将模板/图像与数据库中所存储的图像进行比较。如图6所示,参考标签244,处理器正确识别mdi。
360.9.2.结合颜色、形状
361.分析数字图像或一系列数字图像的颜色和形状,并将其与数据库中各种mdi的颜色和形状进行比较。
362.9.3.特征识别
363.图像内核可以用于扫描图像,以为了与内核本身的相似性。例如,通过计算图像上内核的每个位置的相关乘积,并检查相关系数是否超过指示较好匹配的特定阈值,gsk标签形式的内核可以用于识别gsk启动件。
364.10.光谱药物id
365.10.1单波长红外/紫外线
366.红外和紫外光谱是用于确定样品的化学结构和组成的方法。所有化学物质在一定程度上吸收红外线和紫外线辐射,并且根据其化学结构中存在的键,将吸收比其他更多的一些波长的光。使用受控波长的光源,可以通过将光通过气溶胶照射到光检测器,分析药物对该特定波长的吸收性。然后,可以将该吸收性与mdi数据库中的值进行比较。
367.10.2多波长红外/紫外线
368.除了可以使用多个波长之外,与10.1.相似,。
369.11.发射的力
370.11.1.使用力敏电阻器(fsr),可以确定mdi启动时的力。如本文所述,这将需要与mdi启动检测相结合。一旦检测到mdi启动,该力就会被记录并将与存储在mdi数据库中的值进行比较。
371.12.气溶胶的温度(气溶胶/空气温度或接触蒸发)
372.12.1.单点
373.可以在距离mdi的固定距离处监控温度,并且使用mdi启动期间所检测到的温度,可以将此信息与存储在系统mdi数据库中的温度进行比较。尽管所有mdi使用相同的推进剂系列(hea 134a或hfa 227),但由于不同的药物制剂,在距离mdi的固定距离处,看到气溶胶的温度差。
374.12.2.温度与距离
375.进一步对于实施例12.1,可以在距离mdi的固定距离处使用若干温度传感器,以在mdi启动期间收集温度分布。该温度分布可以被使用,并与系统数据库中的配置文件进行比较。
376.13.来自供应商的mdi上的rfid
377.13.1.如图73所示,射频识别(radio frequency identification,rfid)标签或标签252可以被粘附或模制到由药物的制造商或供应商mdi上。在这种情况下,可能读取mdi适配器内或与vhc的后端组件8或其他组件连接的具有rfid读取器250的mdi上的rfid标签。
378.14.剂量计数器上的rfid(集成或oem)
379.14.1.类似于实施例13.1.,rfid标签可以集成到集成模块或剂量计数器模块中,并且这些可以用与室集成的rfid读取器进行读取。
380.15.由用户放置在mdi上的标签
381.15.1 rfid
382.与实施例13.1.和实施例14.1.类似,可以从mdi读取rfid标签。在该实施例中,rfid以贴纸、粘性贴片或由用户放置在mdi上其他形式出现。
383.15.2条形码(id和2d)
384.与实施例15.1类似,除了可以使用条形码代替rfid。然后,室包括条形码扫描器而
不是rfid读取器。
385.16.访问云上的病人药物清单
386.16.1.蓝牙/wi
‑
fi访问
387.用户的数字医疗记录可以通过因特网进行访问,并且其mdi药物处方可以用于帮助识别与vhc一起使用的mdi。另外,为了确保安全性,医疗服务提供者或付款人可以初始化用户的
‘
配置文件’,并选择其mdi药物,这随后将通过蓝牙或wi
‑
fi传送到vhc。
388.17.与智能吸入器的通信
389.17.1.蓝牙通信/wi
‑
fi通信
390.智能吸入器已用于跟踪mdi的依从性。与这些吸入器的通信将使vhc能够直接识别正在使用的mdi。这可以通过蓝牙或wi
‑
fi通信来完成。
391.18.用户手动选择
392.18.1手动选择
393.如图19所示,用户输入按钮260,例如具有不同的颜色、形状或标记。用户66将按压适当按钮,例如,与救援mdi相关的蓝色,或与控制器mdi相关的红色的。按压这两个按钮的组合将传送正在使用的mdi组合。每个按钮还可以具有视觉指示器,例如灯,其在被按压时发光或保持发光预设时间段(或直到治疗完成)。如果显示错误的指示,则其向用户提供重新开始的标记。单个按钮也可以被使用,其中按钮按压与救援mdi或控制器mdi中的一个相关,且没有按钮按压与另一种类型的mdi相关。在查看病人使用数据时,开处方者将知道哪种类型的药物与救援mdf和控制器mdf中的每一个相关。另外,用户可以通过计算机上的应用程序输入药物信息,例如在用户配置文件设置中。用户可以与开处方者和/或付款人共享所记录的药物活动。
394.可以为用户提供手动选择正在进行的mdi的选项。这可以在每个剂量下完成,或者在接收智能室时用户可以指定药物列表。对于仅具有一种处方药的用户,后面的方法可以有助于确定识别每次使用的mdi,而对于具有多种药物的用户,这将用于简短列出可能的mdi候选,这随后需要系统使用其他实施例中描述的装置进行进一步识别。
395.19.电容/介电常数检测
396.19.1.介电常数检测
397.两个相反的带电特征由形成开路电容器的空气间隙隔开。在mdi启动时,该空气间隙被气溶胶渗透。假设气溶胶具有彼此不同的介电常数,可以测量开路电容器的电容变化,并且该电容值可以与已知气溶胶的数据库中的电容值匹配,并用于识别mdi。
398.20.mdi的共振频率
399.20.1.声音发生器位于vhc内,以扫描方式产生一系列频率。当声音发生器产生mdi的共振频率时,可能出现可通过麦克风检测到的音量尖峰。
400.21.mdi启动件的红外反射
401.21.1.使用红外(infrared,ir)发射器和ir检测器,可以为各种mdi生成红外“签名”。ir发射器和检测器及其位置可以与上面讨论并在附图中示出的白色led和颜色传感器相同。ir辐射指向mdi启动件的嘴部和/或手柄部分,并且所吸收/反射的辐射量用于识别mdi。具体地,在该实施例中,由ir检测器检测所反射的辐射量,并将该值与预先记录的mdi数据库中存在的值进行比较。mdi启动件的材料、形状和表面光洁度均在反射的ir辐射量中
起作用。可以使用单波长ir led/检测器,或者可以使用具有不同ir波长的若干ir led/检测器。
402.面罩力和密封反馈
403.当向用户传送呼吸药物时,经常使用面罩600。例如,面罩可以与vhc 3的嘴部组件12或输出端连接。为了最大化药物输送,重要的是,确保在面罩和使用者面部602之间形成适当的密封。可以通过测量施加到面罩、vhc或其他输送装置(例如喷雾器或opep设备)的力,或通过记录面罩和用户面部之间的接触,可以确定适当的密封。
404.在一实施例中,如图29所示,药物输送系统包括药物输送装置,例如vhc,具有输入端10和输出端14。面罩600与输出端连接。面罩和输送装置沿纵轴6可移动到与用户的面部602接合的位置。力传感器604被设置在面罩600和药物输送装置的输入端10之间。例如,力传感器604可以安装在面罩600和阀组件12(例如,嘴部组件)之间,或者安装在阀组件12和室壳体2之间。力传感器604可以是通过应变计将机械变形或位移转换成电信号的称重传感器,或通过压电效应将力的变化转换成电变化的压电传感器。力传感器将信号传送给计算机500和处理器502,例如其可以被安装在后端组件8上。vhc微控制器监测所施加的力,并向操作输送装置的用户或护理人员提供反馈,以增加、减少或维持所施加的力。例如,实现所需密封所需的力可在1.5至7磅之间。给用户的反馈包括指示器,无论是视觉指示器40(例如,led)、听觉指示器(扬声器)还是振动指示器。力传感器604响应于由药物输送装置沿纵轴施加到面罩的力。指示器均向用户提供关于施加到面罩的力的大小的反馈,无论是太少还是太多,和/或围绕周边不均匀。
405.在另一个实施例中,如图30和图31所示,接触传感器608和接触传感器610可以被集成到面罩600中,以监测、感测和发信围绕面罩周边的用户面部的适当接触。例如,面罩被配置有密封部612,其适于接合用户的面部602。密封部612可包括转入的c形唇缘,终止于自由端615。一个或多个传感器608与密封部连接,其中力传感器响应于施加到密封边缘的力。在一个实施例中,如图30和图31所示,多个传感器被嵌入到密封部中,并且以间隔开的关系,围绕面罩周边或密封部的长度而分布。在可选的实施例中,如图30所示,传感器610包括围绕密封边缘延伸的连续条带。
406.如图30和图31所示,指示器616与传感器通信,并适于向用户提供关于施加到密封边缘的力的大小或者是否已经与用户的面部接触的反馈。例如,指示器可包括视觉指示器、听觉指示器或振动指示器。在一实施例中,视觉指示器包括沿着密封边缘或面罩的周边分布且间隔的多个灯616(例如,led)。在一实施例中,多个视觉指示器分别与多个传感器相关,并且直接与多个传感器连接。
407.在操作中,且如图32和图33所示,用户或护理人员向面罩600施加力,让用户的面部602与面罩的密封边缘612接合,感测施加到面罩的力,或者可选地,在密封边缘上特定位置处进行接触,以及通过指示器616向用户提供关于施加的力和/或接触的反馈。然后,用户/护理人员可以调整施加到面罩的力。在一实施例中,反馈将是灯616的发光,其与检测接触的接触传感器608和接触传感器610连接,并且在没有检测到接触的情况下灯不发光。类似地,部分指示器灯可以发光,此时,不同力传感器已经检测到已经施加的足够力,并且不沿着面罩部分的灯不发光,此时施加的力不够。在其他实施例中,如果施加的力过大,则灯可以以不同颜色发光,或者关闭。
408.一旦激活,控制器(可以被实现为包括一个或多个计算机500元件,例如处理器502(图83))可以分析力传感器或接触传感器的输出,并估计密封的质量。结合所施加的力的测量以及与用户面部的接触的测量,允许该装置提供关于是否形成足够的密封的信息。
409.活动阀
410.当使用各种药物输送装置,例如vhc时,缓慢吸入(最大<30l/min),然后屏息,可显著改善药物在肺的沉积。虽然各种助听器可用于向用户提供吸入速率过高的反馈,但其是被动的,并且不控制速率。因此,其可能被误解或与正反馈混淆(例如,快速吸入以使哨声良好,而不是应该避免声音的预期反馈)。
411.如图34
‑
图37所示,阀700的一个实施例在吸入(或呼出)期间主动调节对打开或关闭的阻力,以便主动控制吸入速率或呼出速率。系统还可以向用户提供阀正在主动控制流的反馈,以便用户可以调节流速。
412.阀可以以各种形式配置,包括如图35和图36所示的环形阀,作为如图87所示的鸭嘴阀720,或作为具有可移动、可弯曲或可变形特征的其他阀门。环形阀包括中心开口702和环形凸缘704,环形凸缘704向外弯曲或变形,使得凸缘从阀座706上抬起,从而允许流通过开口702。鸭嘴阀720具有一对相对的翼片722,其响应于经过其的流而打开以形成开口。该阀可以由液体硅橡胶(liquid silicone rubber,lsr)制成。
413.启动器部分730被应用于或嵌入阀中。例如,启动器部分可以由电活性聚合物(electroactive polymer,eap)制成。当受到电场的刺激时,lsr部分变得更硬,并且抵抗打开。在一实施例中,阀的环形凸缘704被配置有多个eap条带732(被显示为四个)。其他配置,包括更多或更少的条带,或不同形状的部分,也是合适的。在另一实施例中,鸭嘴阀720的至少一个翼片722,以及在一实施例中的两个翼片,被配置有嵌入的电活性聚合物启动器部分730,例如条带。应该理解的是,启动器部分或eap特征也可以被应用于排气阀或阀的呼出部分731。
414.vhc或其他药物输送装置具有限定流通道701的壳体2和壳体12。阀700和阀720被设置在流通道中。阀在第一配置和第二配置之间是可移动的,例如响应于通过流通道的流而打开和关闭(完全或部分)。流可以是吸入或呼出的。响应于刺激,例如电刺激,阀可在第一条件和第二条件之间重新配置。例如,第一条件和第二条件是第一刚度和第二刚度,或者弯曲和/或变形的阻力。当阀处于第一条件时,阀具有对第一配置和第二配置之间移动的第一阻力,例如弯曲或变形的阻力,并且当阀处于第二条件时,阀具有对第一配置和第二配置之间移动的第二阻力,其中第一阻力小于第二阻力。启动器708施加电刺激。
415.在操作中,经过壳体的流通道产生流,例如通过病人吸入或呼出。响应于通过流通道的流,该流使得阀700和阀720在第一配置和第二配置之间移动。根据由本技术的其他部分中所述的各种传感器和方法所计算的流速,如图34所示,可以指示启动器708将刺激(例如,电)施加到阀。响应于该刺激,将阀从第一条件重新配置为第二条件。当阀被重新配置成第二条件时,例如,出现对弯曲或变形更大阻力,经过过通道的流被改变,例如被限制或增加,从而由阀形成的开口,或阀和阀座之间的开口,被限制或保持更小。
416.如图37所示,可以主动地管理阀,使得如上所述感测和检测的经过阀的流速不超过预定阈值,例如30l/min。
417.在智能装置的任何上述实施例中,与传感器、仪表或开关通信或控制传感器、仪表
或开关的控制器或其他处理元件可以被集成到智能装置本身中,被设置在智能装置本身上或远离智能装置本身。应当理解,各种传感器,仪表或开关可以用于多种功能,并且可以以各种组合使用,所有这些组合都与控制器或其他处理元件通信。另外,对于上述任何智能装置,通过传感器、开关或仪表所收集一些或所有数据以及提供给该装置的用户的反馈,可以同时被发送到位于远程的护理人员。位于远程的护理人员或监控机构可以进行干预,以在治疗期间提供进一步的建议或信息。可选地,可以远程存储与用户并行发送给护理人员或监控机构的数据和反馈,以供医疗专业人员后续评估。到远程信息源的并行传输,包括感测数据和任何反馈,还可以防止篡改或损坏存储在智能装置本身上的数据的问题。
418.在本文描述的智能装置的不同实施例中,用于任何控制器电路、传感器、仪表和开关的电池或其他电源可以是可再充电或可移除的。为了最小化电池消耗,可以将某些传感器配置为预定的采样频率而不是连续的测量模式。而且,智能装置上的电路可以仅在检测到特定事件时激活,并且可以在从初始触发起的预定时段之后或者在感测到装置的空闲时段之后自动关闭。
419.尽管结合优选实施例描述了本技术,但是本领域技术人员将认识到,在不脱离本发明的精神和范围的情况下,可以在形式和细节上进行改变。因此,旨在将前述详细描述视为说明性而非限制性的,并且所附权利要求包括其所有等同物,旨在限定本发明的范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。