1.本实用新型属于焊接机器人技术领域,具体涉及一种环保型焊接机器人。
背景技术:
2.焊接机器人是从事焊接(包括切割与喷涂)的工业机器人。根据国际标准化组织(iso)工业机器人属于标准焊接机器人的定义,工业机器人是一种多用途的、可重复编程的自动控制操作机,具有三个或更多可编程的轴,用于工业自动化领域。为了适应不同的用途,机器人最后一个轴的机械接口,通常是一个连接法兰,可接装不同工具或称末端执行器。焊接机器人就是在工业机器人的末轴法兰装接焊钳或焊(割)枪的,使之能进行焊接,切割或热喷涂。
3.焊接机器人在焊接时,与焊接物刚接触时常伴随着大量刺鼻烟气产生,由于焊接机器人缺少一种空气净化回收装置,导致焊接机器人工作时大量烟气散出,对工作室内的空气造成污染,影响到工作人员的工作进程和呼吸健康,对工作人员及周围空气造成严重危害。
4.因此,针对上述技术问题,有必要提供一种环保型焊接机器人。
技术实现要素:
5.本实用新型的目的在于提供一种环保型焊接机器人,以解决现有技术中焊接机器人工作时无法对出现烟气进行有效的收集过滤,影响周围空气环境的问题。
6.为了实现上述目的,本实用新型一实施例提供的技术方案如下:
7.一种环保型焊接机器人,包括承载底座,所述承载底座上设有烟气回收过滤机构,所述烟气回收过滤机构包括装置外壳,所述装置外壳内设有隔板,所述装置外壳与隔板之间形成有空腔,所述空腔内设有二级滤板,所述二级滤板的一侧设有活性炭吸附层,所述二级滤板与活性炭吸附层之间设有一级滤板,所述装置外壳上连接有pvc胶管,所述pvc胶管远离装置外壳的一面上连接有集风槽,所述装置外壳的一侧连接有吸风机,所述装置外壳远离的一侧设有支撑机构。
8.进一步地,所述支撑机构包括多个衔接件,一对所述衔接件上铰接有伸缩套筒,所述伸缩套筒上滑动连接有活动杆,所述活动杆与伸缩套筒之间连接有支撑弹簧,使活动杆能够随着集风槽位置的移动对其进行固定支撑,方便调节吸取烟气的位置,降低对机器人工作时的干扰,同时方便使用者操作。
9.进一步地,所述活动杆远离支撑弹簧的一面上设有挂钩,所述集风槽一侧设有与挂钩相匹配的固定槽,方便对集风槽进行卡合固定和摘取。
10.进一步地,所述装置外壳内设有支撑杆,所述支撑杆上滑动连接有伸缩杆,所述支撑杆远离伸缩杆的一面与伸缩套筒转动连接,能够使伸缩套筒进行角度调节,与集风槽相互对应进行支撑。
11.进一步地,所述吸风机外侧套设有保护壳,对吸风机起到一定的保护作用,降低受
到坠物砸坏的可能,长时间使用时方便使用者拆卸保护壳对扇叶进行清理。
12.与现有技术相比,本实用新型具有以下优点:
13.本实用新型通过焊接机器人上相应机构的设置,有效的对焊接机器人工作时产生的刺鼻烟气进行回收过滤,降低了烟气四处散发对工作室内造成的污染,减小工作人员烟气的吸入,一定程度上对工作室内的环境起到有效的改善,减小工作人员身体健康的影响。
附图说明
14.为了更清楚地说明本技术实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本技术中记载的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
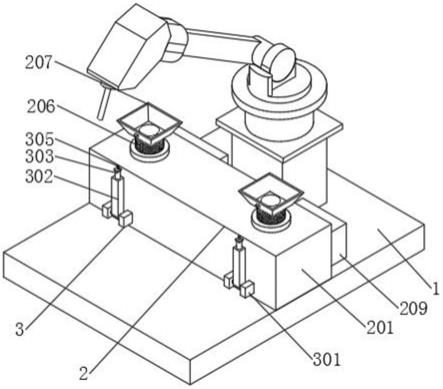
15.图1是本技术一实施方式中一种环保型焊接机器人的立体图;
16.图2是本技术一实施方式中一种环保型焊接机器人的侧视剖面图;
17.图3是本技术一实施方式中一种环保型焊接机器人的正视部分结构剖面图;
18.图4是本技术一实施方式中图2中a处结构示意图;
19.图5是本技术一实施方式中图3中b处结构示意图。
20.图中:1.承载底座、2.烟气回收过滤机构、201.装置外壳、202.隔板、203.二级滤板、204.活性炭吸附层、205.一级滤板、206.pvc胶管、207.集风槽、208.吸风机、209.保护壳、3.支撑机构、301.衔接件、302.伸缩套筒、303.活动杆、304.支撑弹簧、305.挂钩、306.固定槽、307.支撑杆、308.伸缩杆。
具体实施方式
21.以下将结合附图所示的各实施方式对本实用新型进行详细描述。但该等实施方式并不限制本实用新型,本领域的普通技术人员根据该等实施方式所做出的结构、方法、或功能上的变换均包含在本实用新型的保护范围内。
22.本实用新型公开了一种环保型焊接机器人,参图1
‑
图5所示,包括承载底座1,承载底座1上设有烟气回收过滤机构2,对烟气起到过滤吸附的作用,降低对周围空气的污染,烟气回收过滤机构2包括装置外壳201,用于放置烟气回收过滤机构2内的装置,装置外壳201内设有隔板202,将装置外壳201分为两个空腔分别进行吸附。
23.参图1
‑
图5所示,装置外壳201与隔板202之间形成的空腔内均设有二级滤板203,二级滤板203的一侧设有活性炭吸附层204,二级滤板203与活性炭吸附层204之间设有一级滤板205,对烟气中存在的杂质和有毒物质起到过滤吸附作用,装置外壳201上连接有pvc胶管206,pvc胶管206远离装置外壳201的一面上连接有集风槽207,方便对需要吸烟气的位置进行固定,装置外壳201的一侧连接有吸风机208,为吸取烟气提供动力,装置外壳201远离吸风机208的一侧设有支撑机构3。
24.其中,二级滤板203的密度大于一级滤板205的密度,能够依次将烟气中的细小颗粒物进行过滤吸附,再由活性炭吸附层204对烟气内一些有毒物质进行吸附,达到净化作用,吸风机208外侧套设有保护壳209,对吸风机208起到一定的保护作用,降低吸风机208受到坠物砸坏的可能,长时间使用时方便使用者拆卸保护壳209对吸风机208扇叶进行清理。
25.参图1
‑
图3所示,支撑机构3包括多个衔接件301,一对衔接件301上铰接有伸缩套筒302,伸缩套筒302上滑动连接有活动杆303,活动杆303与伸缩套筒302之间连接有支撑弹簧304,使活动杆303能够随着集风槽207位置的移动对其进行固定支撑,方便调节吸取烟气的位置,降低对机器人工作时的干扰,同时方便使用者操作。
26.参图1
‑
图4所示,活动杆303远离支撑弹簧304的一面上设有挂钩305,集风槽207一侧设有与挂钩305相匹配的固定槽306,方便对集风槽207进行卡合固定和摘取。
27.参图3所示,装置外壳201内设有支撑杆307,支撑杆307上滑动连接有伸缩杆308,支撑杆307远离伸缩杆308的一面与伸缩套筒302转动连接,能够使伸缩套筒302进行角度调节,与集风槽207相互对应进行支撑。
28.具体使用时,使用者将集风槽207拿起,pvc胶管206跟随弯曲,将活动杆303的挂钩305与固定槽306相互卡合,拉动活动杆303对集风槽207的位置进行调整,在伸缩杆308的作用下进行固定,打开吸风机208,工作时的烟气从集风槽207处吸收,经过pvc胶管206吸放至装置外壳201内,经过一级滤板205、二级滤板203、活性炭吸附层204的对依次过滤由吸风机208处排出,使用者可通过机器人工作的环境选择使用一个或两个吸风机208进行吸附。
29.由以上技术方案可以看出,本实用新型具有以下有益效果:
30.本实用新型通过焊接机器人上相应机构的设置,有效的对焊接机器人工作时产生的刺鼻烟气进行回收过滤,降低了烟气四处散发对工作室内造成的污染,减小工作人员烟气的吸入,一定程度上对工作室内的环境起到有效的改善,减小工作人员身体健康的影响。
31.对于本领域技术人员而言,显然本实用新型不限于上述示范性实施例的细节,而且在不背离本实用新型的精神或基本特征的情况下,能够以其他的具体形式实现本实用新型。因此,无论从哪一点来看,均应将实施例看作是示范性的,而且是非限制性的,本实用新型的范围由所附权利要求而不是上述说明限定,因此旨在将落在权利要求的等同要件的含义和范围内的所有变化囊括在本实用新型内。
32.此外,应当理解,虽然本说明书按照实施例加以描述,但并非每个实施例仅包含一个独立的技术方案,说明书的这种叙述方式仅仅是为清楚起见,本领域技术人员应当将说明书作为一个整体,各实施例中的技术方案也可以经适当组合,形成本领域技术人员可以理解的其他实施方式。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。