1.本发明属于冶金技术领域,特别是涉及一种机器人测温取样用测距测温枪。
背景技术:
2.冶金生产需要在冶炼过程中对金属熔液进行测温取样,以判定冶金反应的进程。目前的测温取样作业有人工测温取样和自动装置测温取样两种形式,人工测温取样难以避免操作工与高温金属液体的接触,生产的安全性低,冶炼周期长,影响产能提高和成本降低。而先进的冶金生产一般采用自动装置。如炼钢转炉采用副枪自动测温取样,不用倒炉操作,可以节约2~3min的冶炼周期,并且副枪快速提供过程碳含量及钢液温度,副枪获取终点碳含量及氧活度数据等数据有利于冶炼优质钢,在提高钢的产量、质量同时,能够降低能耗及成本。
3.自动测温取样装置替代人工测温取样被广泛应用电炉、钢包炉、转炉等钢铁冶金过程。其能自动进行探头拆卸和安装,精确控制插入深度,但这类自动钢水测温取样装置的测温取样失败率远高于人工操作。这是因为高温熔液在冶金反应过程中容易形成结块,妨碍了自动装置按固定路径将测温取样探头插入高温熔液。现有技术的测枪若具备多种功能的则结构复杂、笨重而体积庞大;结构简单的则功能单一,仅能完成将测温探头或取样器插入钢液进行测温取样;缺少对测枪芯管及测枪延长杆的冷却,缺少对钢水液面高度的实时测量,难于确定下枪位置和下枪高度,特别是测温取样探头插入高温熔液时需要准确控制测点的深度,在高温熔液液面存在较大幅度的变化时,检测液面的准确位置就显得尤为重要。
技术实现要素:
4.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种机器人测温取样用测距测温枪,用于解决现有技术中机器人作业中因工况不同难于保障下枪安全性的问题,以便于机器人自主识别,从而实现智能控制。
5.为实现上述目的及其他相关目的,本发明提供一种机器人测温取样用测距测温枪,所述机器人具有控制系统,机器人测温取样用测距测温枪包括:
6.测枪本体,所述测枪本体的后端设置有法兰安装座,所述测枪本体包括探头接插件、测枪延长杆、测枪芯管、测枪外管、冷却喷管及缓冲组件,所述冷却喷管及缓冲组件可拆卸地设置于测枪外管的内部,所述测枪芯管沿轴向滑动穿设在冷却喷管内,且所述测枪芯管的前端连接测枪延长杆,后端连接缓冲组件,所述测枪延长杆的前端连接探头接插件,所述冷却喷管能够将冷却气体转换成超音速气流,以熄灭纸管探头插入钢液后产生的火焰;
7.视觉测距组件,可拆卸地设置于法兰安装座上,所述视觉测距组件用于获取钢液面图像信息,并向控制系统输出钢液面高度信息和渣面信息,以使控制系统根据工况规划机器人运动轨迹;所述视觉测距组件在测枪本体拔出钢液后识别纸管火焰,并将信息传输到控制系统,以自主启停灭火控制阀。
8.进一步,所述视觉测距组件包括工业摄像头和相机防护罩,所述工业摄像头固定安装在相机防护罩内,且所述工业摄像头朝向所述测枪本体的前端;所述相机防护罩与工业摄像头之间具有用于调整镜头光圈和焦距的调整空间,所述相机防护罩的材质为金属,所述相机防护罩设有第一电缆入口和第一冷却气入口,所述相机防护罩内通以干燥冷却气体对工业摄像头降温。
9.进一步,所述相机防护罩在对应于工业摄像头的前端处设有透明的镜片,所述相机防护罩上设有多个外喷口,所述外喷口流出的干燥冷却气体被吹至镜片上。
10.进一步,所述视觉测距组件设置为左右两组,位于所述法兰安装座的左右两侧,其中一组作为主视摄像头,另一组作为视差测距摄像头,两组视觉测距组件的公共视野能够覆盖目标敏感区域。
11.进一步,所述冷却喷管与测枪芯管之间的间隙形成超音速发生器结构,能够将冷却气体加速形成所述超音速气流喷出,所述超音速气流的喷出方向与测枪延长杆的轴向同向,所述超音速气流的喷射距离超出测枪延长杆的末端范围。
12.进一步,所述测枪外管为中空的方形薄壁管或圆形薄壁管,所述冷却喷管设置于测枪外管的内部前端,所述缓冲组件设置于测枪外管的内部后端,所述测枪外管的外部后端与所述法兰安装座通过紧固件连接;所述测枪外管的后端设有第二电缆入口和第二冷却气入口。
13.进一步,所述缓冲组件包括缓冲座、缓冲弹簧、滑套,所述缓冲座固定于测枪外管的内部,所述滑套与测枪芯管固连并滑动设置于缓冲座内,所述缓冲弹簧的一端连接于滑套上,另一端连接于缓冲座上。
14.进一步,所述测枪芯管的内部为中空结构,所述测枪芯管的前端与测枪延长杆螺纹连接,后端与缓冲组件螺纹连接,所述探头接插件的电缆穿设在测枪芯管的中空结构中,所述电缆在测枪芯管与测枪延长杆之间的螺纹连接处采用快插连接器连接。
15.进一步,所述测枪本体还包括喷管外罩,所述喷管外罩固定设置于测枪外管的外部前端,并对应于所述测枪延长杆与测枪芯管的螺纹连接处。
16.进一步,所述法兰安装座上设置有溅渣防护板,所述溅渣防护板位于视觉测距组件的前侧。
17.如上所述,本发明的机器人测温取样用测距测温枪,具有以下有益效果:
18.1)视觉测距组件替代人工完成钢液面距离测量、钢液面渣块分布位置确定、纸管火焰检测、探头架上纸管空置位置判定;
19.2)视觉测距组件引导机器人的控制系统自主决策测温取样点的位置,确保插入深度的一致性,避免测枪碰到钢液面上的渣块而损坏;
20.3)通过缓冲组件可缓冲测枪轴向冲击力,增强测枪横向刚度,延长消耗件的使用寿命;
21.4)通过设置冷却喷管,使冷却气体沿冷却喷管与测枪芯管之间的间隙流动对测枪芯管进行冷却,最终由测枪外管前端排出,减小了测枪芯管和测枪延长杆的热变形,增加测枪延长杆的使用寿命;
22.5)视觉测距组件检测纸管探头火焰,引导机器人控制系统自主决策灭火。
附图说明
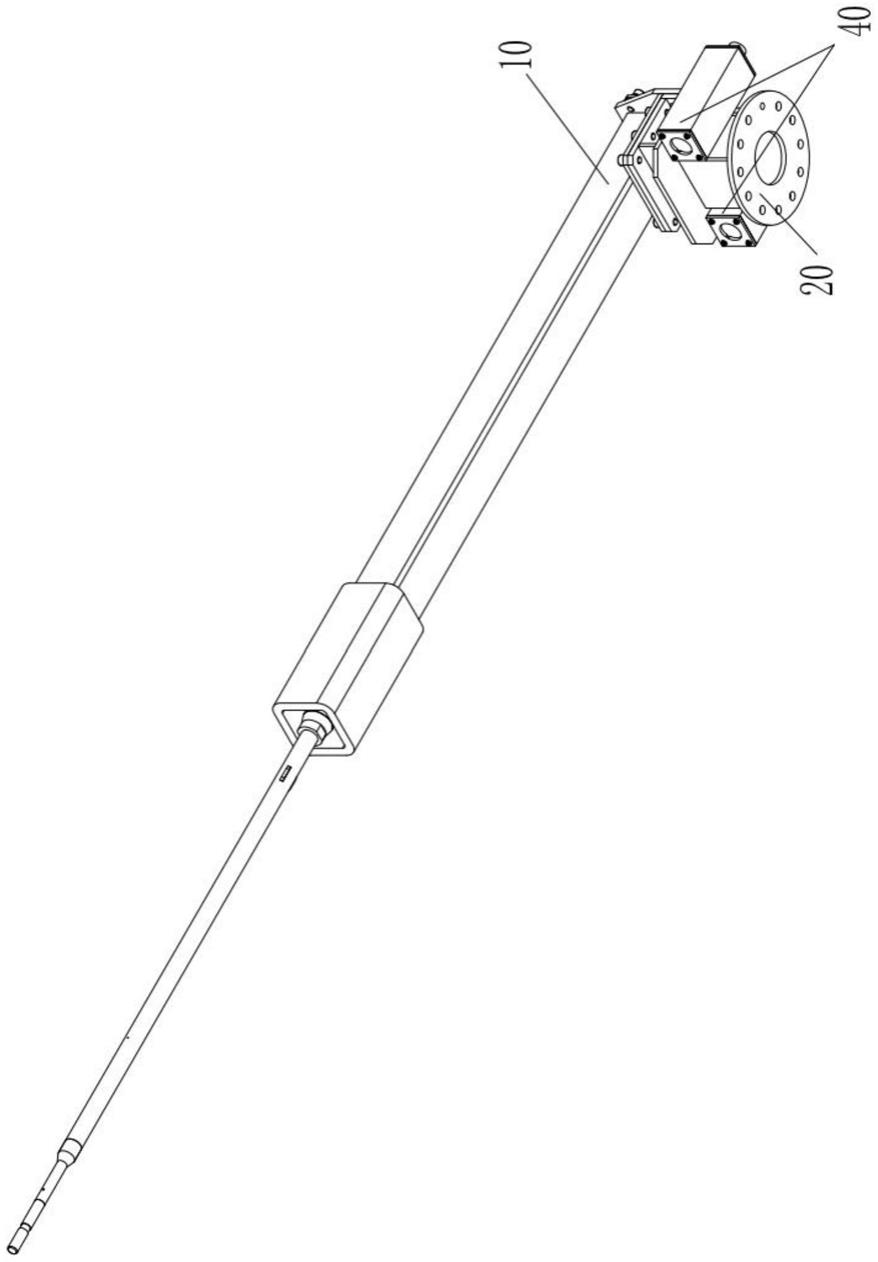
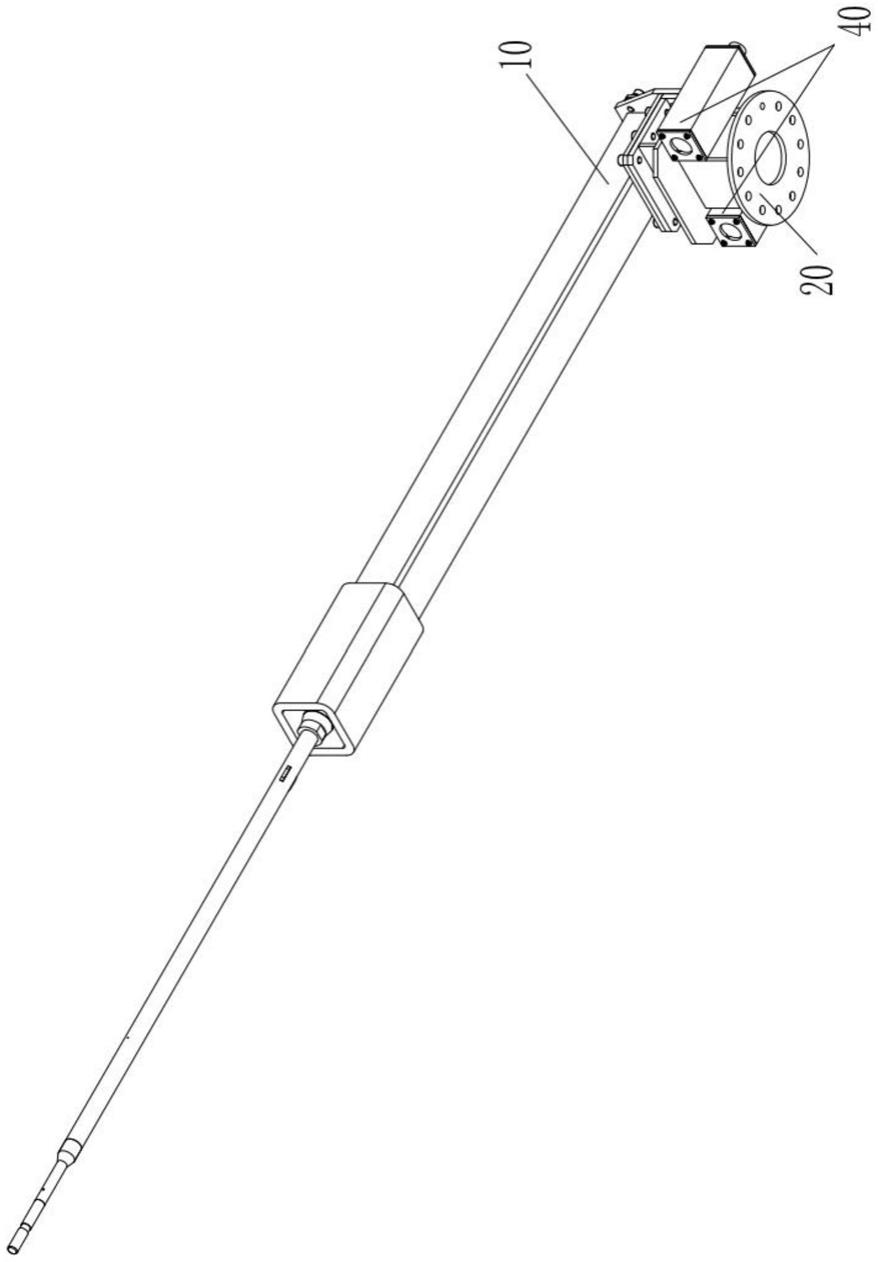
23.图1为本发明实施例的机器人测温取样用测距测温枪的轴测图;
24.图2为本发明实施例的机器人测温取样用测距测温枪的正视图;
25.图3为本发明实施例的机器人测温取样用测距测温枪的俯视图;
26.图4为图3中视觉测距组件及缓冲组件的放大图。
27.零件标号说明
28.10
‑
测枪本体;11
‑
探头接插件;111
‑
弹性销;112
‑
电缆;12
‑
测枪延长杆;121
‑
快插连接器;13
‑
喷管外罩;14
‑
测枪芯管;15
‑
测枪外管;16
‑
缓冲组件;161
‑
缓冲座;162
‑
缓冲弹簧;163
‑
滑套;17
‑
冷却喷管;
29.20
‑
法兰安装座;21
‑
溅渣防护板;
30.30
‑
纸管探头;
31.40
‑
视觉测距组件;41
‑
镜片;42
‑
工业摄像头;43
‑
相机防护罩;44
‑
公共视野。
具体实施方式
32.以下由特定的具体实施例说明本发明的实施方式,熟悉此技术的人士可由本说明书所揭露的内容轻易地了解本发明的其他优点及功效。
33.须知,本说明书所附图式所绘示的结构、比例、大小等,均仅用以配合说明书所揭示的内容,以供熟悉此技术的人士了解与阅读,并非用以限定本发明可实施的限定条件,故不具技术上的实质意义,任何结构的修饰、比例关系的改变或大小的调整,在不影响本发明所能产生的功效及所能达成的目的下,均应仍落在本发明所揭示的技术内容得能涵盖的范围内。同时,本说明书中所引用的如“上”、“下”、“左”、“右”、“中间”及“一”等的用语,亦仅为便于叙述的明了,而非用以限定本发明可实施的范围,其相对关系的改变或调整,在无实质变更技术内容下,当亦视为本发明可实施的范畴。
34.本例中所述后端和前端是以距离炉内金属熔液液面距离为参考,靠近液面的一端为前端,远离液面的一端为后端。
35.请结合图1至图3所示,本发明提供一种机器人测温取样用测距测温枪,所述机器人具有控制系统,机器人测温取样用测距测温枪包括:
36.测枪本体10,所述测枪本体10的后端设置有法兰安装座20,所述测枪本体10包括探头接插件11、测枪延长杆12、测枪芯管14、测枪外管15、冷却喷管17及缓冲组件16,所述冷却喷管17及缓冲组件16可拆卸地设置于测枪外管15的内部,所述测枪芯管14沿轴向滑动穿设在冷却喷管17内,且所述测枪芯管14的前端连接测枪延长杆12,后端连接缓冲组件16,所述测枪延长杆12的前端连接探头接插件11,所述冷却喷管17能够将冷却气体转换成超音速气流,以熄灭纸管探头30插入钢液后产生的火焰;
37.视觉测距组件40,可拆卸地设置于法兰安装座20上,所述视觉测距组件40用于获取钢液面图像信息,并向控制系统输出钢液面高度信息和渣面信息,以使控制系统根据工况规划机器人运动轨迹;所述视觉测距组件40在测枪本体10拔出钢液后识别纸管火焰,并将信息传输到控制系统,以自主启停灭火控制阀。
38.其中,法兰安装座20用于连接在工业机器人的多关节臂末端,由工业器人关节臂的空间运动直接将测枪本体10上的纸管探头30插入钢液,并通过耐高温电缆112传输检测
信息,依次使用不同纸管探头30的敏感器件实现钢液测温、钢液测铝定氧、取钢液样、取钢渣样、取钢液气样等功能。利用视觉测距组件40实现替代人工完成钢液面距离测量、钢液面渣块分布位置确定、纸管火焰检测、探头架上纸管空置位置判定;当视觉测距组件40检测到纸管火焰时,可引导机器人的控制系统自主决策是否通入冷却气体,使冷却气体在冷却喷管17作用下形成超音速气流,实现自主灭火。
39.本实施例中,所述法兰安装座20上设置有溅渣防护板21,所述溅渣防护板21位于视觉测距组件40的前侧。其中,溅渣防护板21上开设有通光孔,以便于摄像单元的镜头拍照。此种结构,可保护视觉测距组件40及机器人关节臂末端在临近高温钢液受到热辐射时,阻挡冶金产生过程飞溅的高温渣损坏视觉测距组件40和机器人本体。
40.所述测枪外管15为中空的方形薄壁管或圆形薄壁管,其均不会影响测枪的使用,具体可根据实际需求设置。所述冷却喷管17设置于测枪外管15的内部前端,所述缓冲组件16设置于测枪外管15的内部后端。
41.所述测枪外管15的外部后端与所述法兰安装座20通过紧固件连接。具体的,所述法兰安装座20与测枪外管15之间设有安装孔和定位孔,通过连接螺栓和定位销将法兰安装座20与测枪外管15连接,在视觉测距组件40需要运行标定程序时,可以从法兰安装座20上拆下测枪本体10,仅由机器人本体带着安装有视觉测距组件40的法兰安装座20进行空间运动,实现机器人手眼视觉的快速标定调试作业。另外,所述测枪外管15的后端设有第二电缆入口和第二冷却气入口,以便分别通入冷却气体以及连接电缆。
42.本实施例中,所述探头接插件11的尾部插入所述测枪延长杆12的前端,并通过弹性销111连接。如此,便于根据实际工况快速更换寿命到期的探头接插件11。
43.测枪延长杆12与测枪芯管14之间采用螺纹连接,具体的,所述测枪芯管14的前端具有内螺纹接口以与测枪延长杆12螺纹连接,后端具有外螺纹接口以与缓冲组件16螺纹连接。此种结构,方便测枪芯管14分别与测枪延长杆12及缓冲组件16的快速连接和拆卸。
44.测枪延长杆12与测枪芯管14均为中空结构,所述探头接插件11的电缆112穿设在测枪芯管14的中空结构中,并从测枪本体10的尾部穿出,从而使电缆112得到保护。由于测枪延长杆12与测枪芯管14之间采用螺纹连接,所述电缆112在测枪芯管14与测枪延长杆12之间的螺纹连接处采用快插连接器121连接或分断,能够便于在测枪延长杆12损坏时快速更换。
45.并且,所述测枪本体10还包括喷管外罩13,所述喷管外罩13固定设置于测枪外管15的外部前端,并对应于所述测枪延长杆12与测枪芯管14的螺纹连接处。具体的,喷管外罩13可拆卸地设置于测枪外管15外部,此结构,能够防止快插连接器121因高温钢液的热辐射和高温渣的飞溅而受热损坏。
46.本实施例中,测枪芯管14的后端穿过冷却喷管17连接到缓冲组件16上,冷却喷管17与缓冲组件16均固定安装在测枪外管15的内部,以便受到测枪外管15的保护。其中,测枪芯管14可以在冷却喷管17内滑动,冷却喷管17在测枪芯管14受到侧向力时起到滑动支撑的作用,增强测枪本体10的弯曲刚性,限制测枪延长杆12前端的位移和变形,避免测枪延长杆12晃动,保证了不会发生震颤而影响正常作业。
47.本实施例中,所述冷却喷管17与测枪芯管14之间的间隙形成超音速发生器结构,能够将冷却气体加速形成所述超音速气流喷出,所述超音速气流的喷出方向与测枪延长杆
12的轴向同向,所述超音速气流的喷射距离超出测枪延长杆12的末端范围。具体的,超音速发生器结构的两端呈喇叭口状,从两端至中部逐渐减小,可以将高压冷却气体(如氮气)加速到超过音速1倍以上的速度沿测枪延长杆12的轴线方向吹出,快速冷却测枪延长杆12和套装在测枪延长杆12外的纸管探头30、纸管取样器等,并熄灭纸管探头30由于插入高温钢液而燃烧的火焰。同时,冷却气体沿测枪外管15与测枪芯管14之间的间隙流动过程中对测枪芯管14进行冷却,最终由测枪外管15的前端排出,减小了测枪芯管14和测枪延长杆12的热变形,增加了测枪延长杆12的使用寿命;所述测距测温枪在插入钢液前,将压缩空气或高压氮气等冷却气体通入测枪外管15并从冷却喷管17喷出,由于冷却喷管17的结构符合超音速射流喷管条件,使喷出的冷却气体快速带走纸管的热量产生灭火效果。
48.本实施例中,参阅图4,所述缓冲组件16包括缓冲座161、缓冲弹簧162、滑套163,所述缓冲座161固定于测枪外管15的内部,所述滑套163与测枪芯管14固连并滑动设置于缓冲座161内,所述缓冲弹簧162的一端连接于滑套163上,另一端连接于缓冲座161上。具体的,测枪芯管14的后端穿过冷却喷管17连接到滑套163上,并通过限位垫片和锁紧螺母锁紧。此种结构,利用缓冲弹簧162起到对测枪芯管14的轴向缓冲作用,可缓冲测枪芯管14受到的轴向冲击力,增强测枪本体10的轴向刚度,延长消耗件的使用寿命。
49.本实施例中,所述视觉测距组件40包括工业摄像头42和相机防护罩43,所述工业摄像头42固定安装在相机防护罩43内,且所述工业摄像头42朝向所述测枪本体10的前端;所述相机防护罩43与工业摄像头42之间具有用于调整镜头光圈和焦距的调整空间,所述相机防护罩43的材质为金属,所述相机防护罩43设有第一电缆入口和第一冷却气入口(图中未示出),所述相机防护罩43内通以干燥冷却气体对工业摄像头42降温。具体的,相机防护罩43选用金属材质,可以保护工业摄像头42免于碰撞损坏。
50.本实施例中,所述相机防护罩43在对应于工业摄像头42的前端处设有透明的镜片41,所述相机防护罩43上设有多个外喷口,所述外喷口流出的干燥冷却气体被吹至镜片41上。具体的,所述镜片41采用石英玻璃材质,设置外喷口用于吹扫镜片41上的粉尘,以保证镜片41的清洁度,从而保证拍摄效果。
51.本实施例中,所述视觉测距组件40设置为左右两组,位于所述法兰安装座20的左右两侧,其中一组作为主视摄像头,另一组作为视差测距摄像头,两组视觉测距组件40的公共视野44能够覆盖目标敏感区域。具体的,通过设置两组视觉测距组件40组成双目视觉系统实现双目视觉测距,主视摄像头采集的图像用于确定钢液面渣块的平面位置、检测纸管火焰、识别探头架纸管空置位等,两组视觉测距组件40均可以互换功能。
52.视觉测距组件40内置工业摄像头42指向所述测枪本体10前端,在纸管探头30插入钢液之前临近钢液面时开始工作,获取钢液面图像信息,并向机器人的控制系统输出钢液面高度信息和渣面信息,机器人的控制系统自主规划测枪本体10的运动轨迹,引导机器人躲避渣块;通过视觉测距组件40识别测枪延长杆12上有无纸管探头30,避免测枪本体10插入钢液时由于无纸管保护而损坏;视觉测距组件40在面对探头架时识别探头架上的空置状况,纠正人工设定错误,避免误操作;通过视觉测距组件40在测枪本体10拔出钢液后识别纸管火焰,并将信息传输到机器人控制系统,自主启停压缩空气或高压氮气的灭火控制阀,所述冷却喷管17将高压的冷却气体转换成超音速气流,连续喷吹或短促间隙喷吹超音速冷却气体,吹灭纸管探头30插入高温钢液后产生的明火。
53.综上,在本发明实施例提供的机器人测温取样用测距测温枪中,利用测枪的缓冲组件在自动插取探头时能够避免发生硬碰撞,有效保护纸管探头和机器人,提高接插的成功率;在进行视觉测距组件的标定时可以拆下测枪本体进行标定作业,方便、快速、可靠。机器人采用测温取样用测距测温枪进行钢液测温、钢液测铝定氧、取钢液样、取钢渣样、取钢液气样等多种作业过程中,可以利用视觉测距组件获取的信息智能判断作业状况,自行决策作业过程,提高机器人作业的成功率和可靠性;利用视觉测距组件识别纸管插入钢液后产生的火焰,使控制系统结合冷却喷管自主熄灭纸管燃烧的火焰,使工业机器人智能测温取样工作站的作业安全性提高,有利于钢铁冶金企业安全生产。
54.本发明的机器人测温取样用测距测温枪可以安装于高炉铁水沟测温取样装置、铁水脱硫站自动测温取样装置、转炉吹氩喂丝站自动测温取样装置、lf精炼炉自动测温取样装置、rh真空炉自动测温取样装置、vd真空精炼炉自动测温取样装置、电炉自动测温取样装置、连铸机中间包自动测温取样装置等各类高温熔液的自动测温取样装置,具有广阔的应用前景。
55.上述实施例仅例示性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,举凡所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等效修饰或改变,仍应由本发明的权利要求所涵盖。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。