1.本实用新型属于机械自动化领域,涉及一种自动磁环点胶机装置。
背景技术:
2.磁环是电子电路中的抗干扰元件,对于高频噪声有很好的抑制作用,一般使用铁氧体材料制成。数据线上加装磁环,可较好地解决数据线,信号线和连接器的高频干扰抑制问题,而且具有使用简单,方便,有效,占用空间不大等一系列优点,用铁氧体抗干扰磁心来抑制电磁干扰是经济简便而有效的方法,磁环已广泛应用于计算机等电子设备。
3.磁环为圆环状,在数据线一端或两端加装磁环时,首先将磁环分别套装在数据线的两端,再点上胶水,使磁环固定在数据线的两端。目前很多企业的数据线加装磁环工序仍停留在手工操作阶段,通过手工点胶的操作使磁环固定在数据线的两端,员工长时间从事简单机械性的重复劳动,视觉容易疲劳,经常会出现点胶不均匀,甚至出现磁环脱落等现象,影响产品质量。
技术实现要素:
4.要解决的问题:需要开发一种只需将数据线、磁环放入指定位置,就能自动对数据线进行点胶,然后将磁环套住的装置。
5.本实用新型针对现有人工磁环点胶不均匀的状况,而设计的一种只需将数据线放入指定位置,就能自动定量地对数据线进行点胶,然后将磁环套回去进行胶合的装置。
6.为了解决以上技术问题,本实用新型采用的技术方案是:一种点胶机的自动点胶装置,点胶装置(2)安装在点胶装置支撑台(1)正前方,点胶装置支撑台(1)位于工作平台(8)上方,点胶装置(2)与治具装置a(6)、治具装置b(7)平行。
7.点胶装置(2)由点胶头(4)、导杆气缸(3)、电缸(5)组成,点胶头(4)和导杆气缸(3)位于电缸(5)前方,点胶头(4)和导杆气缸(3)在电缸(5)作用下可左右平行移动。
8.导杆气缸(3)位于点胶头(4)后方,用于控制点胶头(4)上下垂直移动。
9.治具装置a(6)、治具装置b(7)平行安装在工作平台(8)表面,且位于点胶装置支撑台(1)下方,在步进电机控制下治具装置a(6)、治具装置b(7)可分别前后方向平行移动,其运动轨迹与点胶头(4)的运动轨迹成直角。
10.本实用新型的有益效果:
11.1.自动点胶装置可定量对数据线进行点胶,克服了数据线人工点胶不均匀、脱胶的状况;
12.2.工人只需将数据线、磁环放在指定位置,装置可自动完成点胶,磁环胶合工序,极大提高了工作效率。
附图说明
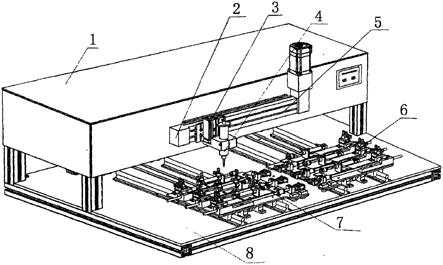
13.图1.一种点胶机的自动点胶装置示意图
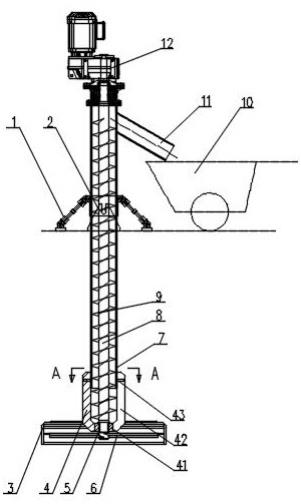
14.图2.一种点胶机的自动点胶装置的治具装置示意图
15.附图标记:点胶装置支撑台(1)、点胶装置(2)、导杆气缸(3)、点胶头(4)、电缸(5)、治具装置a(6)、数据线a1(6
‑1‑
1)、数据线a2(6
‑1‑
2)、数据线a3(6
‑1‑
3)、磁环a1(6
‑2‑
1)、磁环a2(6
‑2‑
2)、磁环a3(6
‑2‑
3)、治具装置b(7)、数据线b1(7
‑1‑
1)、数据线b2(7
‑1‑
2)、数据线b3(7
‑1‑
3)、磁环b1(7
‑2‑
1)、磁环b2(7
‑2‑
1)、磁环b3(7
‑2‑
3)、工作平台(8)
具体实施方式
16.如图1、图2所示,一种点胶机的自动点胶装置,点胶装置(2)安装在点胶装置支撑台(1)正前方,点胶装置支撑台(1)位于工作平台(8)上方,点胶装置(2)与治具装置a(6)、治具装置b(7)平行。
17.点胶装置(2)由点胶头(4)、导杆气缸(3)、电缸(5)组成,点胶头(4)和导杆气缸(3)位于电缸(5)前方,点胶头(4)和导杆气缸(3)在电缸(5)作用下可左右平行移动。
18.导杆气缸(3)位于点胶头(4)后方,用于控制点胶头(4)上下垂直移动。
19.治具装置a(6)、治具装置b(7)平行安装在工作平台(8)表面,且位于点胶装置支撑台(1)下方,在步进电机控制下治具装置a(6)、治具装置b(7)可分别前后方向平行移动,其运动轨迹与点胶头(4)的运动轨迹成直角。
20.本实用新型涉及到的治具装置a(6)由有三条平行的磁环套装装置组成,治具装置b(7)同样由有三条平行的磁环套装装置组成,其结构、形状、大小与治具装置a(6)完全相同。
21.首先将数据线a1(6
‑1‑
1)、数据线a2(6
‑1‑
2)、数据线a3(6
‑1‑
3)分别放入治具装置a(6)中的每个线槽,磁环a1(6
‑2‑
1)、磁环a2(6
‑2‑
2)、磁环a3(6
‑2‑
3)分别放置在治具装置a(6)的磁环夹块中。
22.将数据线b1(7
‑1‑
1)、数据线b2(7
‑1‑
2)、数据线b3(7
‑1‑
3)分别放入治具装置b(7)中的每个线槽,磁环b1(7
‑2‑
1)、磁环b2(7
‑2‑
2)、磁环b3(7
‑2‑
3)分别放置在治具装置b(7)的磁环夹块中。
23.启动电源按钮,步进电机带着治具装置b(7)向前移动,电缸(5)控制着导杆气缸(3)、点胶头(4)平行移动到治具装置b(7)的数据线b1(7
‑1‑
1)正上方,导杆气缸(3)控制着点胶头(4)垂直向下移动,在接近数据线b1(7
‑1‑
1)时,电缸(5)控制着导杆气缸(3)、点胶头(4)向左平行移动,移动过程中点胶头(4)持续点胶,点胶头(4)点射出的胶水轨迹与磁环b1(7
‑2‑
1)长度相等,当点胶头(4)停止点胶时,导杆气缸(3)控制着点胶头(4)回升,这时磁环夹块推动着磁环b1(7
‑2‑
1)往左移动,盖住刚才被点射过胶水的数据线b1(7
‑1‑
1)部分,电缸(5)控制着导杆气缸(3)、点胶头(4)向右复位。
24.治具装置b(7)继续向前平行移动,在点胶头(4)移动到数据线b2(7
‑1‑
2)正上方时,导杆气缸(3)、控制着点胶头(4)垂直向下移动,在接近数据线b2(7
‑1‑
2)时,电缸(5)控制着导杆气缸(3)、点胶头(4)向左平行移动,移动过程中点胶头(4)持续点胶,点胶头(4)点射出的胶水轨迹与磁环磁环b2(7
‑2‑
2)长度相等。当点胶头(4)停止点胶时,导杆气缸(3)控制着点胶头(4)回升,这时磁环夹块推动着磁环b2(7
‑2‑
2)往左移动,盖住刚才被点射过胶水的数据线b2(7
‑1‑
2)部分,电缸(5)控制着导杆气缸(3)、点胶头(4)向右复位。
25.治具装置b(7)继续向前平行移动,在点胶头(4)移动到数据线b3(7
‑1‑
3)正上方
时,导杆气缸(3)、控制着点胶头(4)垂直向下移动,在接近数据线b3(7
‑1‑
3)时,电缸(5)控制着导杆气缸(3)、点胶头(4)向左平行移动,移动过程中点胶头(4)持续点胶,点胶头(4)点射出的胶水轨迹与磁环磁环b3(7
‑2‑
3)长度相等。当点胶头(4)停止点胶时,导杆气缸(3)控制着点胶头(4)回升,这时磁环夹块推动着磁环b3(7
‑2‑
3)往左移动,盖住刚才被点射过胶水的数据线b3(7
‑1‑
3)部分,电缸(5)控制着导杆气缸(3)、点胶头(4)向右复位,治具装置b(7)往后平行移动到原始位置。
26.然后电缸(5)控制着导杆气缸(3)、点胶头(4)平行移动到右边的治具装置a(6)上方,重复刚才的动作,使治具装置a(6)上的磁环a1(6
‑2‑
1)、磁环a2(6
‑2‑
2)、磁环a(6
‑2‑
3)套住喷上胶水后的数据线a1(6
‑1‑
1)、数据线a2(6
‑1‑
2)、数据线a3(6
‑1‑
3)进行胶合。
27.这时导杆气缸(3)带着点胶头(4)回升复位,治具装置a(6)往后平行移动到原始位置。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。