1.本发明涉及强激光技术领域,特别是一种光纤激光相干合成系统中高精度活塞相位闭环控制方法及系统。
背景技术:
2.光纤激光因其紧凑波导结构的严格光场约束,具备了光束质量好、热管理方便等优势,近年来在工业加工与科学研究等领域具有广泛应用。然而,单路光纤激光被束缚在纤芯的极小截面内,功率密度的增大更容易激发非线性效应和模式不稳定等现象,制约了光纤激光在保持光束质量的前提下实现功率的进一步提升。采用主振荡器功率放大(英文名称为master oscillator power amplifier,简称mopa)的激光相干阵列能够拓展光纤激光阵列数目,降低单路激光的功率密度需求,将热分散到不同链路,从而突破单路激光的输出功率限制,获得更高功率更高亮度的激光输出,是实现高能激光系统的一种典型方案。
3.但是,如果仅仅是光纤激光阵列的简单功率叠加,只能实现光纤激光阵列的功率叠加,由于不同光纤会引入不同的相位噪声,因此光斑形态会呈现“类高阶模”的光场分布,无法保证输出激光的亮度。为了有效实现亮度的提升,必须对每一路光纤激光实施相位控制以补偿各路之间的相位噪声,使各路光纤激光在目标平面相干叠加。
4.针对活塞相位控制,根据不同控制方法和不同控制逻辑,可以分为基于间接测量相位噪声幅度实现闭环控制的间接控制法和基于直接测量相位噪声幅度值并进行补偿的直接控制法。间接控制法主要基于优化算法发展而来,典型代表为随机并行梯度下降算法等,然而,这种方法随着激光阵元数目的拓展存在控制带宽下降的问题。直接控制法可以直接获取每一路激光的活塞相位误差值,根据计算得到的每一路激光的活塞相位值进行闭环控制,典型代表为基于线性强度信号解算的干涉条纹提取法、抖动法等。针对抖动法而言,随着阵元的拓展,抖动法的时域与频域拓展受限,从而影响合成路数的拓展。针对基于线性强度信号解算的干涉条纹提取法而言,其依托于干涉条纹的线性强度信号进行计算条纹极值坐标。该方法的计算结果的精度严重受限于每个单元光束的干涉条纹采样分辨率,因此在大阵元合成系统中,每个单元光束的成像区域有限,计算结果与活塞相位噪声之间的误差较大,通过干涉条纹计算得到的活塞相位取值通过闭环的相位控制回路进行活塞相位矫正时将无法严格抵消活塞相位噪声,最终影响合成路数拓展和效率下降。
技术实现要素:
5.为提升通过干涉条纹计算活塞相位误差的准确度这一难题,本发明提出了一种高精度活塞相位闭环控制方法及系统,其利用二维图像的所有数据进行组合计算获取精确相位信息,解决传统方法仅仅采用线性强度信号一维数据运算时由采样率不足引入的计算精度不足难题,实现大阵元相干合成系统中高精度活塞相位闭环控制。
6.为实现上述技术目的,本发明采用的具体技术方案如下:
7.高精度活塞相位闭环控制方法,包括:
8.将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;
9.获取参考光束光轴与激光阵列光轴之间的夹角;
10.采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像;
11.按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;
12.对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;
13.在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值;
14.将各单元光束的活塞相位噪声取值转化为各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值,并施加相应的电压给对应的相位调制器,对激光阵列中各单元光束的活塞相位进行闭环控制。
15.进一步地,每个单元光束的干涉条纹子图像的二维频谱信息分布,如下:
[0016][0017]
式中,(x,y)为干涉条纹子图像中像素点的位置坐标,(u,v)为干涉条纹子图像经二维傅里叶变换后得到的图像中像素点的频谱坐标,f
i
(x,y)代表第i个单元光束的干涉光斑光强信号随位置的分布关系,f
i
(u,v)代表对第i个单元光束的干涉光斑光强信号进行二维傅里叶变换后的频谱分布函数,e代表自然常数,j代表虚数单位;
[0018]
进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数,如下:
[0019][0020]
式中,||为复数运算中的取模函数,arg()为复数运算中的取幅角函数。
[0021]
进一步地,各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值为:
[0022][0023]
其中,为第i个单元光束的活塞相位噪声取值,v
π
为相位调制器的半波电压。
[0024]
进一步地,区别于现有技术中条纹极值坐标的计算方法,本发明提供一种高精度的干涉条纹最大值的位置坐标计算方法,包括:
[0025]
将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;
[0026]
获取参考光束光轴与激光阵列光轴之间的夹角;
[0027]
采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像;
[0028]
按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;
[0029]
对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;
[0030]
在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值也为各单元光束的活塞相位噪声取值;
[0031]
根据参考光束光轴与激光阵列光轴之间的夹角和种子激光中心波长,计算干涉条纹图样的条纹间隔;
[0032]
根据所述幅角值与2π的比值,结合干涉条纹图样的条纹间隔,即可获得各干涉条纹子图像中干涉条纹最大值的位置坐标。
[0033]
进一步地,本发明所述干涉条纹图样的条纹间隔,为:
[0034][0035]
其中,d表示干涉条纹图样的条纹间隔,θ表示参考光束光轴与激光阵列光轴之间的夹角,λ表示种子激光中心波长。
[0036]
进一步地,本发明各干涉条纹子图像中干涉条纹最大值的位置坐标x
i,max
,如下:
[0037][0038]
其中,为第i个单元光束的活塞相位噪声取值,x
i,center
为第i个单元光束对应的干涉条纹子图像的中心位置坐标。
[0039]
进一步地,本发明的种子激光来源于种子激光器,将种子激光器输出的激光先经预放大器进行功率放大之后,由1
×
2光纤分束器分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束。进一步地,种子激光器为窄线宽线偏振光纤种子激光器。
[0040]
进一步地,本发明的所述激光阵列相干合成单元包括1
×
n光纤分束器、n个相位调制器、n个主放大器和n个准直器组成的准直器阵列,输入激光阵列相干合成单元的种子激光先经1
×
n光纤分束器均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器、主放大器和准直器,各路单元光束依次经相位调制器、主放大器进行相位调制和功率放大之后经准直器阵列中的准直器准直输出。
[0041]
进一步地,本发明的参考光束经过一个可调增益光纤放大器后,通过参考光准直器准直后入射到半透半反镜,经采样镜采样得到的小部分激光阵列经光学缩束器缩束后入射到半透半反镜,分别经半透半反镜透射、反射后入射到高速相机,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像。
[0042]
进一步地,本发明通过调整参考光准直器的输出角度与半透半反镜的倾角,使得干涉条纹图像清晰可见。
[0043]
本发明还提供一种高精度活塞相位闭环控制系统,包括:
[0044]
种子激光产生单元,用于产生种子激光,并将其分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;
[0045]
激光阵列相干合成单元,包括1
×
n光纤分束器、n个相位调制器、n个主放大器和n个准直器组成的准直器阵列,输入激光阵列相干合成单元的种子激光先经1
×
n光纤分束器均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器、主放大器和准直器,各路单元光束依次经相位调制器、主放大器进行相位调制和功率放大之后经准直器阵列中的准直器准直输出;
[0046]
激光阵列采样单元,包括采样镜和光学缩束器,由采样镜采集激光阵列到光学缩束器,得到缩束后的激光阵列;
[0047]
图像采集单元,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像;
[0048]
干涉条纹解算模块,按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值;
[0049]
相位控制单元,用于将将各单元光束的活塞相位噪声取值转化为各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值,并施加相应的电压给对应的相位调制器,对激光阵列中各单元光束的活塞相位进行闭环控制。
[0050]
与现有技术相比,本发明的有益效果是:
[0051]
本发明利用了高速相机取样点多这一优势,通过数学中的二维傅里叶变换,将条纹位置的精度提高到远超像素尺寸的水平,获得了高精度的条纹位置。
[0052]
与现有的相位控制方法相比,实现了相位计算过程中计算精度的量级提升。因此本发明具有更小的控制残差、更高的控制精度。
[0053]
本发明提供的方法具备拓展性,利用二维图像获取高精度干涉条纹位置的计算方法,在与条纹数据处理相关的其他领域也具备重要应用,如光纤传感领域,利用这种方法可以获得更灵敏的相移信息。
附图说明
[0054]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图示出的结构获得其他的附图。
[0055]
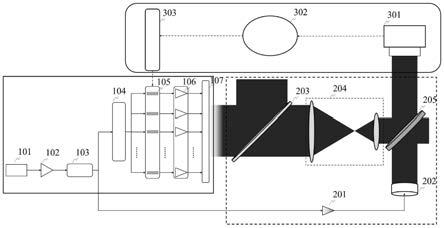
图1为本发明一实施例提供的高精度活塞相位闭环控制系统的结构示意图;
[0056]
图2为对于一实施例中活塞相位噪声为0rad的单位光束的干涉条纹子图像,采用传统方法获取其干涉条纹最大值的位置坐标的结果示意图,其中传统方法即通过计算全幅图像中的干涉条纹最大值并获取其位置坐标;
[0057]
图3为对于活塞相位噪声为0rad的单位光束的干涉条纹子图像,采用本发明中提出的模函数所画二维图样示意图,其中矩形框所示区域代表参考光束光轴与激光阵列光轴之间夹角对应的频谱参量;
[0058]
图4为对于活塞相位噪声为0rad的单位光束的干涉条纹子图像,采用本发明中提出的辐角函数所画二维图样示意图,其中矩形框所示区域代表获取的活塞相位值;
[0059]
图5为对于活塞相位噪声为2.6202rad的单位光束的干涉条纹子图像,采用传统方法获取其干涉条纹最大值的位置坐标的结果示意图,其中传统方法即通过计算全幅图像中的干涉条纹最大值并获取其位置坐标;
[0060]
图6为对于活塞相位噪声为2.6202rad的单位光束的干涉条纹子图像,采用本发明中提出的模函数所画二维图样示意图,其中矩形框所示区域代表参考光束光轴与激光阵列光轴之间夹角对应的频谱参量;
[0061]
图7为对于活塞相位噪声为2.6202rad的单位光束的干涉条纹子图像,采用本发明中提出的辐角函数所画二维图样示意图,其中矩形框所示区域代表获取的活塞相位值;
[0062]
图8为一实施例中利用传统方法,只计算干涉条纹最大值坐标判断条纹位置的活塞相位计算残差的效果图;
[0063]
图9为一实施例中利用本发明方法即利用二维傅里叶变换的活塞相位计算残差的效果图;
[0064]
图1中标号:
[0065]
101、种子激光器;102、预放大器;103、1
×
2光纤分束器;104、1
×
n光纤分束器;105、相位调制器;106、主放大器;107、准直器阵列;201、可调增益光纤放大器;202、参考光准直器;203、采样镜;204、光学缩束器;205、半透半反镜;301、高速相机;302、干涉条纹位置解算模块;303、相位控制单元。
具体实施方式
[0066]
为了使本发明的技术方案及优点更加清楚明白,以下结合附图及实施例,对本发明进行进一步详细说明。应当理解,此处所描述的具体实施例仅用于解释本发明,并不用于限定本发明。
[0067]
本发明提供了基于二维图像全数据组合解算的高精度活塞相位闭环控制方法及系统,可以更准确的通过离散采样的高速相机的图像数据计算得到条纹中心的准确位置。相较传统的条纹位置计算的精度取决于像素点的尺寸,本发明提出的条纹位置计算方法将精度提升一个量级以上。通过更精准的条纹位置计算方法,在对单元光束的活塞相位进行补偿时,可以实现更小的锁相残差,从而提升了相干合成的合成效率,进一步提升了合成激光的亮度。
[0068]
具体地,本发明一实施例中提供一种高精度干涉条纹位置计算方法,包括:
[0069]
参见附图1,本发明一实施例提供一种高精度活塞相位闭环控制系统,包括窄线宽线偏振光纤种子激光器101、预放大器102、1
×
2光纤分束器103、1
×
n光纤分束器104、相位
调制器105、主放大器106、光纤准直器107、可调增益光纤放大器201、参考光准直器202、采样镜203、光学缩束器204、半透半反镜205、高速相机301、干涉条纹位置解算模块302、相位控制单元303构成。其中种子激光器101采用窄线宽线偏振光纤种子激光器。
[0070]
从种子激光器101输出的激光、首先经过一个低功率的预放大器102进行功率放大,再经过一个1
×
2光纤分束器进行分束,其中一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束。
[0071]
输入激光阵列相干合成单元的种子激光先经1
×
n光纤分束器104均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器105、主放大器106和光纤准直器107,各路单元光束依次经相位调制器105、主放大器106进行相位调制和功率放大之后经准直器阵列中的光纤准直器107准直输出。
[0072]
参考光束经过一个可调增益光纤放大器201后,通过参考光准直器202准直后入射到半透半反镜205。激光阵列相干合成单元中的准直器阵列输出的激光阵列经过采样镜203,采样镜203为高反镜,大部分能量的激光阵列反射输出,很小一部分能量的激光阵列由高反镜透射后经过光学缩束器缩束,再入射到半透半反镜,作为探测光用于进行相位控制。入射到半透半反镜的参考光束和缩束后的激光阵列分别经半透半反镜透射、反射后入射到高速相机,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像。
[0073]
从高反镜透射出的透射光经过光学缩束器缩束后与参考光束、高速相机的靶面尺寸相当,经过一个半透半反镜实现mach
–
zehnder干涉仪光路系统的构建。高速相机作为图像采集单元,探测缩束后的激光阵列与参考光束的干涉条纹图像。干涉条纹解算模块将隐藏在干涉条纹图像中的活塞相位信息提取出来。具体地,干涉条纹解算模块,按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值。相位控制单元,用于将将各单元光束的活塞相位噪声取值转化为各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值,并施加相应的电压给对应的相位调制器,对激光阵列中各单元光束的活塞相位进行闭环控制。
[0074]
本发明一实施例中提供一种高精度活塞相位闭环控制方法,包括:
[0075]
将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束。
[0076]
获取参考光束光轴与激光阵列光轴之间的夹角θ。
[0077]
采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像。
[0078]
按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像。
[0079]
对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,如下:
[0080][0081]
式中,(x,y)为干涉条纹子图像中像素点的位置坐标,(u,v)为干涉条纹子图像经二维傅里叶变换后得到的图像中像素点的频谱坐标,f
i
(x,y)代表第i个单元光束的干涉光斑光强信号随位置的分布关系,f
i
(u,v)代表对第i个单元光束的干涉光斑光强信号进行二维傅里叶变换后的频谱分布函数,e代表自然常数,j代表虚数单位;
[0082]
进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数,如下:
[0083][0084]
式中,||为复数运算中的取模函数,arg()为复数运算中的取幅角函数。
[0085]
在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数m
i
(u,v)找到参考光束光轴与激光阵列光轴之间夹角θ对应的频谱参量,通过幅角函数a
i
(u,v)找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值
[0086]
将各单元光束的活塞相位噪声取值转化为各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值,如下:
[0087][0088]
其中,为第i个单元光束的活塞相位噪声取值,v
π
为相位调制器的半波电压。
[0089]
最后,施加相应的电压给对应的相位调制器,对激光阵列中各单元光束的活塞相位进行闭环控制。
[0090]
本发明一实施例中提供一种高精度的干涉条纹最大值的位置坐标计算方法,包括:
[0091]
将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束。
[0092]
获取参考光束光轴与激光阵列光轴之间的夹角θ。
[0093]
采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像。
[0094]
按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像。
[0095]
对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,如下:
[0096][0097]
式中,(x,y)为干涉条纹子图像中像素点的位置坐标,(u,v)为干涉条纹子图像经二维傅里叶变换后得到的图像中像素点的频谱坐标,f
i
(x,y)代表第i个单元光束的干涉光
斑光强信号随位置的分布关系,f
i
(u,v)代表对第i个单元光束的干涉光斑光强信号进行二维傅里叶变换后的频谱分布函数,e代表自然常数,j代表虚数单位;
[0098]
进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数,如下:
[0099][0100]
式中,||为复数运算中的取模函数,arg()为复数运算中的取幅角函数。
[0101]
在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数m
i
(u,v)找到参考光束光轴与激光阵列光轴之间夹角θ对应的频谱参量,通过幅角函数a
i
(u,v)找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值
[0102]
根据参考光束光轴与激光阵列光轴之间的夹角和种子激光中心波长,计算干涉条纹图样的条纹间隔为:
[0103][0104]
其中,d表示干涉条纹图样的条纹间隔,θ表示参考光束光轴与激光阵列光轴之间的夹角,λ表示种子激光中心波长。
[0105]
根据所述幅角值与2π的比值,结合干涉条纹图样的条纹间隔,即可获得各干涉条纹子图像中干涉条纹最大值的位置坐标x
i,max
,如下:
[0106][0107]
其中,为第i个单元光束的活塞相位噪声取值,x
i,center
为第i个单元光束对应的干涉条纹子图像的中心位置坐标。
[0108]
为了体现本发明相对于传统方法的优越性,其中传统方法即通过计算全幅图像中的干涉条纹最大值并获取其位置坐标,并结合条纹间距计算活塞相位值。本发明进行了对比实验,具体如下:
[0109]
图2为对于一实施例中活塞相位噪声为0rad的单位光束的干涉条纹子图像,采用传统方法获取其干涉条纹最大值的位置坐标的结果示意图。对于图2中所针对的同一幅活塞相位噪声为0rad的单位光束的干涉条纹子图像,图3为采用本发明中提出的模函数所画二维图样示意图,其中矩形框所示区域代表参考光束光轴与激光阵列光轴之间夹角对应的频谱参量;图4为采用本发明中提出的辐角函数所画二维图样示意图,其中矩形框所示区域代表获取的活塞相位值。由于针对的是活塞相位噪声为0rad的单位光束的干涉条纹子图像,由于条纹最大值位置严格在图像的中心位置(坐标为(82,83)),传统方法与本发明方法均可得到干涉条纹最大值的位置坐标以及活塞相位值的准确取值。
[0110]
图5为对于一实施例中活塞相位噪声为2.6202rad的单位光束的干涉条纹子图像,采用传统方法获取其干涉条纹最大值的位置坐标的结果示意图。对于图5中所针对的同一幅活塞相位噪声为2.6202rad的单位光束的干涉条纹子图像,图6为采用本发明中提出的模函数所画二维图样示意图,其中矩形框所示区域代表参考光束光轴与激光阵列光轴之间夹
角对应的频谱参量;图7为采用本发明中提出的辐角函数所画二维图样示意图,其中矩形框所示区域代表获取的活塞相位值。在图5中,传统方法计算的条纹最大值坐标在y轴上的取值为65,对应的活塞相位为2.4721rad。而利用本发明计算得到的条纹最大值坐标在y轴上的取值和活塞相位分别为63.9732(其中63.9732=83
‑
19.0268)和2.6131rad,精度得到明显提升。
[0111]
为了进一步说明该新方法的优势,不失一般性,通过蒙特卡洛模拟构造一组差异化的活塞相位误差,对比本发明与传统方法的活塞相位计算精度,结果参见图8和图9。图8为利用传统方法,只计算干涉条纹最大值坐标判断条纹位置的活塞相位计算残差;图9为利用本发明方法即利用二维傅里叶变换的活塞相位计算残差。可以明显看到,计算残差的均方根误差值由图8的0.0713rad下降到图9的0.0034rad,提升了20多倍。同样地,利用本发明所提出的方法确定干涉条纹最大值的位置的精度也由原来的像素级别提升20倍。由此可得,采用该方法可以实现更小残差、更高精度的活塞相位计算与补偿,实现相干合成系统产生更高效率的激光合成。
[0112]
综上所述,虽然本发明已以较佳实施例揭露如上,然其并非用以限定本发明,任何本领域普通技术人员,在不脱离本发明的精神和范围内,当可作各种更动与润饰,因此本发明的保护范围当视权利要求书界定的范围为准。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。