技术特征:
1.高精度活塞相位闭环控制方法,其特征在于,包括:将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;获取参考光束光轴与激光阵列光轴之间的夹角;采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像;按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值;将各单元光束的活塞相位噪声取值转化为各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值,并施加相应的电压给对应的相位调制器,对激光阵列中各单元光束的活塞相位进行闭环控制。2.根据权利要求1所述的高精度活塞相位闭环控制方法,其特征在于,每个单元光束的干涉条纹子图像的二维频谱信息分布,如下:式中,(x,y)为干涉条纹子图像中像素点的位置坐标,(u,v)为干涉条纹子图像经二维傅里叶变换后得到的图像中像素点的频谱坐标,f
i
(x,y)代表第i个单元光束的干涉光斑光强信号随位置的分布关系,f
i
(u,v)代表对第i个单元光束的干涉光斑光强信号进行二维傅里叶变换后的频谱分布函数,e代表自然常数,j代表虚数单位;进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数,如下:式中,||为复数运算中的取模函数,arg()为复数运算中的取幅角函数。3.根据权利要求1所述的高精度活塞相位闭环控制方法,其特征在于,各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值为:其中,为第i个单元光束的活塞相位噪声取值,v
π
为相位调制器的半波电压。4.根据权利要求1、2或3所述的高精度活塞相位闭环控制方法,其特征在于,种子激光来源于种子激光器,将种子激光器输出的激光先经预放大器进行功率放大之后,由1
×
2光
纤分束器分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;所述激光阵列相干合成单元包括1
×
n光纤分束器、n个相位调制器、n个主放大器和n个准直器组成的准直器阵列,输入激光阵列相干合成单元的种子激光先经1
×
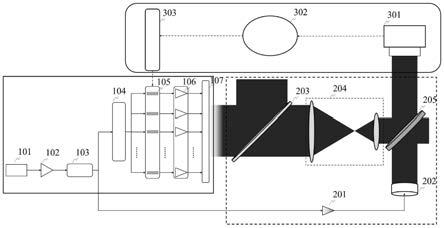
n光纤分束器均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器、主放大器和准直器,各路单元光束依次经相位调制器、主放大器进行相位调制和功率放大之后经准直器阵列中的准直器准直输出;参考光束经过一个可调增益光纤放大器后,通过参考光准直器准直后入射到半透半反镜,经采样镜采样得到的小部分激光阵列经光学缩束器缩束后入射到半透半反镜,分别经半透半反镜透射、反射后入射到高速相机,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像。5.根据权利要求4所述的高精度活塞相位闭环控制方法,其特征在于,通过调整参考光准直器的输出角度与半透半反镜的倾角,使得干涉条纹图像清晰可见。6.高精度活塞相位闭环控制系统,其特征在于,包括:种子激光产生单元,用于产生种子激光,并将其分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;激光阵列相干合成单元,包括1
×
n光纤分束器、n个相位调制器、n个主放大器和n个准直器组成的准直器阵列,输入激光阵列相干合成单元的种子激光先经1
×
n光纤分束器均分为n路单元光束,各路单元光束分别对应一路传输路径,各路传输路径中依次设有相位调制器、主放大器和准直器,各路单元光束依次经相位调制器、主放大器进行相位调制和功率放大之后经准直器阵列中的准直器准直输出;激光阵列采样单元,包括采样镜和光学缩束器,由采样镜采集激光阵列到光学缩束器,得到缩束后的激光阵列;图像采集单元,利用高速相机探测缩束后的激光阵列与参考光束的干涉条纹图像;干涉条纹解算模块,按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值;相位控制单元,用于将将各单元光束的活塞相位噪声取值转化为各单元光束在激光阵列相干合成单元中对应的相位调制器两端的电压值,并施加相应的电压给对应的相位调制器,对激光阵列中各单元光束的活塞相位进行闭环控制。7.一种高精度的干涉条纹最大值的位置坐标计算方法,其特征在于,包括:将种子激光分为两部分,一部分输入到激光阵列相干合成单元用于产生激光阵列,一部分作为参考光束;获取参考光束光轴与激光阵列光轴之间的夹角;采集一部分激光阵列相干合成单元产生的激光阵列并对其进行缩束,利用高速相机探
测缩束后的激光阵列与参考光束的干涉条纹图像;按照激光阵列的排布方式将干涉条纹图像进行区域划分,获得激光阵列中每个单元光束的干涉条纹子图像;对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值也为各单元光束的活塞相位噪声取值;根据参考光束光轴与激光阵列光轴之间的夹角和种子激光中心波长,计算干涉条纹图样的条纹间隔;根据所述幅角值与2π的比值,结合干涉条纹图样的条纹间隔,即可获得各干涉条纹子图像中干涉条纹最大值的位置坐标。8.根据权利要求7所述的高精度的干涉条纹最大值的位置坐标计算方法,其特征在于,每个单元光束的干涉条纹子图像的二维频谱信息分布,如下:式中,(x,y)为干涉条纹子图像中像素点的位置坐标,(u,v)为干涉条纹子图像经二维傅里叶变换后得到的图像中像素点的频谱坐标,f
i
(x,y)代表第i个单元光束的干涉光斑光强信号随位置的分布关系,f
i
(u,v)代表对第i个单元光束的干涉光斑光强信号进行二维傅里叶变换后的频谱分布函数,e代表自然常数,j代表虚数单位;进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数,如下:式中,||为复数运算中的取模函数,arg()为复数运算中的取幅角函数。9.根据权利要求7所述的高精度的干涉条纹最大值的位置坐标计算方法,其特征在于,所述干涉条纹图样的条纹间隔,为:其中,d表示干涉条纹图样的条纹间隔,θ表示参考光束光轴与激光阵列光轴之间的夹角,λ表示种子激光中心波长。10.根据权利要求9所述的高精度的干涉条纹最大值的位置坐标计算方法,其特征在于,各干涉条纹子图像中干涉条纹最大值的位置坐标x
i,max
,如下:其中,为第i个单元光束的活塞相位噪声取值,x
i,center
为第i个单元光束对应的干
涉条纹子图像的中心位置坐标。
技术总结
高精度活塞相位闭环控制方法及系统,包括获得激光阵列中每个单元光束的干涉条纹子图像,对每个单元光束的干涉条纹子图像进行二维傅里叶变换,获得每个单元光束的干涉条纹子图像的二维频谱信息分布,进而得到每个单元光束的干涉条纹子图像的二维频谱信息的模函数和幅角函数;在每个单元光束的干涉条纹子图像的二维频谱信息分布中,通过模函数找到参考光束光轴与激光阵列光轴之间夹角对应的频谱参量,通过幅角函数找到所述频谱参量对应的幅角值,所述幅角值为各单元光束的活塞相位噪声取值,用于对单元光束的活塞相位进行补偿,可以实现更小的锁相残差,从而提升了相干合成的合成效率,进一步提升了合成激光的亮度。进一步提升了合成激光的亮度。进一步提升了合成激光的亮度。
技术研发人员:马鹏飞 常琦 侯天悦 常洪祥 张雨秋 龙金虎 邓宇 粟荣涛 吴坚 李灿 姜曼 马阎星 周朴
受保护的技术使用者:中国人民解放军国防科技大学
技术研发日:2021.08.18
技术公布日:2021/11/23
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。