1.本实用新型涉及物料运输设备技术领域,具体涉及一种可伸展物料运输叉车机器人。
背景技术:
2.现有的物料运输叉车机器人包括机体、叉体和行走装置,行走装置安装在叉车的底部,行走装置可以是舵轮装置或者差速驱动装置,叉体通过升降装置可升降地安装在机体的前侧。物料运输叉车机器人工作时,处于低水平位置的叉体可伸入待承载的货物或货物架的底部,随后控制叉体升起即可将货物或货物架抬升离地,并对货物或货物架进行运送。
3.现有的该种物料运输叉车机器人存在的问题是,叉体的长度和宽度固定,只能用于抬升一定尺寸范围内的货物或货物架,适用性较差。
技术实现要素:
4.本实用新型的目的在于提供一种叉体长度和宽度可变的可伸展物料运输叉车机器人。
5.本实用新型提供的可伸展物料运输叉车机器人包括机体、叉体和行走装置,行走装置设置在机体的底部,叉体包括基础承载台,基础承载台可升降地设置在机体的前侧;叉体还包括第一侧伸承载台和前伸承载台;前伸承载台沿叉体的延伸方向可伸缩地设置在基础承载台的前端;第一侧伸承载台沿叉体的宽度方向可伸缩地设置在基础承载台的侧部,宽度方向垂直于延伸方向。
6.由上述方案可见,第一侧伸承载台和前伸承载台处于收纳状态时叉体具有最小支撑面积,第一侧伸承载台可在宽度方向上向外伸展,前伸承载台可在延伸方向上向外伸出,从而增加承载宽度或承载长度,从而使叉体适用于搬运体积更大的货物或货物架,提高运输稳定性。
7.进一步的方案是,叉体还包括侧伸驱动机构,侧伸驱动机构包括第一转动驱动单元和第一齿轮,第一转动驱动单元可驱动第一齿轮转动;第一侧伸承载台包括第一转盘,第一转盘可沿第一轴心转动,第一转盘的外周具有第一轮齿部和第一承载部;第一轮齿部与第一齿轮啮合,第一齿轮带动下,第一转盘可转动且第一承载部可移动于第一收缩位置与第一伸展位置之间,在宽度方向上,第一收缩位置比第一伸展位置更靠近基础承载台。
8.更进一步的方案是,叉体包括第二侧伸承载台,第二侧伸承载台包括第二转盘,第二转盘可沿第二轴心转动,第二转盘的外周具有第二轮齿部和第二承载部;第二轮齿部与第一轮齿部啮合,第一转盘带动下,第二转盘可转动且第二承载部可移动于第二收缩位置与第二伸展位置之间,在宽度方向上,第二收缩位置比第二伸展位置更靠近基础承载台。
9.由上可见,第一侧伸承载台和第二侧伸承载台均以转摆的方式进行伸缩运动,此设置更利于将第一侧伸承载台和第二侧伸承载台布置在延伸方向上的同一位置,从而更稳
定地承载货物或货物架,另外,由于叉体的宽度较小,若以直线伸缩方式设置第一侧伸承载台和第二侧伸承载台,为保证收纳效果,二者在宽度方向上的伸出距离有限。而采用转摆方式进行伸缩运动,第一承载部和第二承载部则沿叉体的延伸方向延伸,收纳效果不受第一承载部和第二承载部的长度所影响,因此,此设置下能使叉体的宽度变化量的设置更灵活,进一步提高适用性。
10.进一步的方案是,第一承载部处于第一收缩位置时,第二承载部处于第二收缩位置;第一承载部处于第一伸展位置时,第二承载部处于第二伸展位置。
11.由上可见,此设置使第一侧伸承载台和第二侧伸承载台的伸缩变换均有同步性,提高变换效率。
12.进一步的方案是,叉体还包括第一位置检测装置、第二位置检测装置、第一检测件和第二检测件;第一位置检测装置和第二位置检测装置固定设置在基础承载台;第一检测件设置在第一转盘上,第二检测件设置在第二转盘上;当第一承载部位于第一伸展位置,第一检测件位于第一位置检测装置的检测范围内,当第二承载部件位于第二收缩位置时,第二检测件位于第二位置检测装置的检测范围内,或当第一承载部位于第一收缩位置,第一检测件位于第一位置检测装置的检测范围内,当第二承载部件位于第二伸展位置时,第二检测件位于第二位置检测装置的检测范围内。
13.由上可见,由于第一侧伸承载台和第二侧伸承载台的收缩变化同步进行,第一检测件和第二检测件分别设置在第一侧伸承载台和第二侧伸承载台上,且第一检测件和第二检测件分别用于检测收缩位置和伸展位置,此设置下,仅使用两个位置检测装置和两个检测件则实现了对两个转盘对应的两个不同位置的检测,降低生产投入,且保证检测准确性。
14.进一步的方案是,位于第一收缩位置的第一承载部收纳于基础承载台的侧部以内。
15.由上可见,此设置能保证第一侧伸承载台的收纳效果,不影响基础状态下的叉体的使用。
16.进一步的方案是,基础承载台具有基础承载表面;第一侧伸承载台具有第一侧伸承载表面;前伸承载台具有前伸承载表面;基础承载表面、第一侧伸承载表面和前伸承载表面位于同一水平面上。
17.由上可见,多个承载面位于同一水平面上以保证多个承载面均能有效地与货物或货物架抵接,保证承载稳定性。
18.进一步的方案是,在延伸方向上,第一侧伸承载台靠近前伸承载台而远离机体。
19.由上可见,此设置下,当前伸承载台和第一侧伸承载台均处于伸展状态,在叉体的延伸方向上,第一侧伸承载台能大致位于叉体的中部区域,第一侧伸承载台能支撑在货物或货物架底部的中央区域,从而使支撑点的分布更合理,进一步提高承载的稳定性。
20.进一步的方案是,叉体包括第一导轨和第二导轨,第一导轨和第二导轨均沿延伸方向设置,第一导轨固定在基础承载台上,第二导轨与前伸承载台固定连接,第一导轨和第二导轨的一个上设有轨道,第一导轨和第二导轨的另一个上设有滑轮组,轨道与滑轮组配合,第一导轨与第二导轨可在延伸方向上相对移动。
21.更进一步的方案是,叉体还包括前伸驱动机构,前伸驱动机构包括第二转动驱动单元、第二齿轮和齿条,第二转动驱动单元可驱动第二齿轮转动;齿条与第二导轨固定连
接,齿条沿延伸方向设置,第二齿轮与齿条啮合。
22.由上可见,此设置能保证前伸承载台的伸缩稳定性,还能使前伸承载台具有更大的前伸距离。
附图说明
23.图1为本实用新型可伸展物料运输叉车机器人实施例第一视角的结构图。
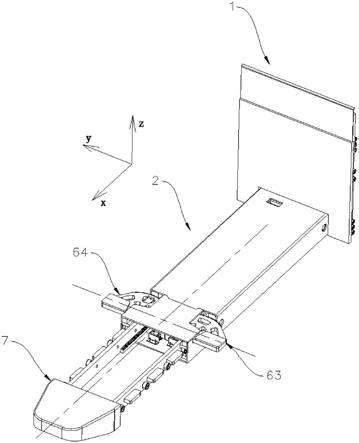
24.图2为本实用新型可伸展物料运输叉车机器人实施例第二视角的结构图。
25.图3为本实用新型可伸展物料运输叉车机器人实施例中叉体的结构分解图。
26.图4为本实用新型可伸展物料运输叉车机器人实施例中处于收缩状态的侧伸承载结构的结构图。
27.图5为本实用新型可伸展物料运输叉车机器人实施例中处于伸展状态的侧伸承载结构的结构图。
28.图6为本实用新型可伸展物料运输叉车机器人实施例中前伸承载台和前伸驱动机构的结构图。
29.图7为本实用新型可伸展物料运输叉车机器人实施例中叉体处于伸展状态的结构图。
30.图8为本实用新型可伸展物料运输叉车机器人实施例中支撑机构处于第一状态的结构图。
31.图9为本实用新型可伸展物料运输叉车机器人实施例中支撑机构处于第二状态的结构图。
具体实施方式
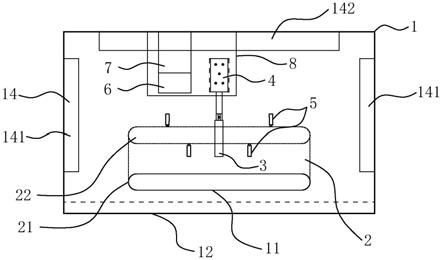
32.参见图1和图2,本实施例的可伸展物料运输叉车机器人主要包括机体1、叉体2和行走装置3和支撑装置4。行走装置3设置在机体1的底部,叉体2可升降地设置在机体1的前侧,支撑装置4设置在叉体2的底部。行走装置3为舵轮装置,支撑装置4包括连杆机构40和设置在连杆机构40上的支撑轮44。
33.参见图3,叉体2包括基础承载台5、第一侧伸承载台63、第二侧伸承载台64和前伸承载台7。参见图1,图示x轴方向为叉体2的长度方向,图示y轴方向为叉体2的宽度方向,叉体2及其上的基础承载台5均沿x轴方向延伸成长形,前伸承载台7沿x轴方向可伸缩地设置在基础承载台5的前端,第一侧伸承载台63和第二侧伸承载台64沿y轴方向可伸缩地设置在基础承载台5的左右两侧。
34.参见图4,叉体2还包括侧伸驱动机构,侧伸驱动机构包括第一转动驱动单元61和第一齿轮62,第一转动驱动单元61为电机,第一齿轮62连接在第一转动驱动单元61的输出轴。第一侧伸承载台63包括第一转盘630和第一承载板65,第一转盘630可沿第一轴心601转动,第一转盘630的外周具有第一轮齿部631和第一承载部632,第一承载板65固定在第一承载部632上;第二侧伸承载台64包括第二转盘640和第二承载板66,第二转盘640的外周具有第二轮齿部641和第二承载部642,第二承载板66固定在第二承载部642上。
35.结合图6,基础承载台5内具有在y轴方向上相对设置的两道第一导轨52,两道第一导轨52的延伸端部均设置有转轴53,两根转轴53所在处分别为上述的第一轴心601和第二
轴心602,第一转盘630和第二转盘640分别通过轴承安装在两根转轴53而实现转动。
36.参见图4和图5,第一轮齿部631与第一齿轮62啮合,第二轮齿部641与第一轮齿部631啮合,第一转动驱动单元61驱动后,第一齿轮62带动下,第一转盘630转动,同时,在第一转盘630的带动下,第二转盘640转动。
37.在第一齿轮62的带动下,第一转盘630可转动且第一承载部632可移动于第一收缩位置与第一伸展位置之间,在第一转盘630带动下,第二转盘640可转动且第二承载部642可移动于第二收缩位置与第二伸展位置之间。如图4所示,第一承载部632处于第一收缩位置,第二承载部642处于第二收缩位置,如图5所示,第一承载部632处于第一伸展位置时第二承载部642处于第二伸展位置。
38.参见图1、图4和图5,在y轴方向上,位于第一收缩位置的第一承载部632和位于第二收缩位置的第二承载部642均收纳于基础承载台5的侧部以内,而位于第一伸展位置的第一承载部632和位于第二伸展位置的第二承载部642均伸出于基础承载台5的侧部以外,即第一收缩位置比第一伸展位置更靠近基础承载台5,第二收缩位置比第二伸展位置更靠近基础承载台5。本实施例中,基础承载台5的侧部为基础承载台5在y轴方向上的端面。
39.另外,叉体2还包括第一位置检测装置681、第二位置检测装置682、第一检测件691和第二检测件692,第一位置检测装置681和第二位置检测装置682均为红外检测仪,第一位置检测装置681和第二位置检测装置682固定设置在基础承载台5,第一检测件691设置在第一转盘630上,第二检测件692设置在第二转盘640上。从图4可见,当第二承载部642件位于第二收缩位置时,第二检测件692位于第二位置检测装置682的检测范围内,从图5可见,当第一承载部632位于第一伸展位置,第一检测件691位于第一位置检测装置681的检测范围内。
40.参见图6,叉体还包括前伸驱动机构,前伸驱动机构包括第二转动驱动单元78、主动锥形齿轮77、从动锥形齿轮76、第二齿轮75和齿条73。第二转动驱动单元78为电机,第二转动驱动单元78沿x轴方向设置,主动锥形齿轮77连接在第二转动驱动单元78的输出轴上;从动锥形齿轮76和第二齿轮75在y轴方向上同轴设置。
41.再结合图3,叉体2包括第一导轨52和第二导轨72。基础承载台5具有外壳51,基础承载面501即外壳51的上表面;两道第一导轨52固定安装在外壳51内且分别位于宽度两侧,两道第一导轨52均沿x轴方向延伸,第一导轨52上具有轨道520。第二导轨72沿x轴方向延伸,两道第二导轨72的延伸端部与前伸承载台7固定连接,齿条73固定安装在第二导轨72的内侧,第二导轨72的外侧设置有滑轮组74,轨道520与滑轮组74配合而使第一导轨52与第二导轨72可在延伸方向上相对移动。
42.由于主动锥形齿轮77与从动锥形齿轮76啮合,从动锥形齿轮76和第二齿轮75同轴转动,第二齿轮75与齿条73啮合,当第二转动驱动单元78启动,前伸承载台7即可在x轴方向上相对于基础承载台5进行伸缩运动。
43.前伸承载台7、第一侧伸承载台63和第二侧伸承载台64处于收纳状态时,叉体2具有最小支撑面积;第一侧伸承载台63、第二侧伸承载台64可在宽度方向上向外伸展,前伸承载台7可在延伸方向上向外伸出,从而增加承载宽度或承载长度,从而使叉体2适用于搬运体积更大的货物或货物架,提高运输稳定性。
44.参见图7,在x轴方向上,第一侧伸承载台63和第二侧伸承载台64靠近前伸承载台7
而远离机体1。当前伸承载台7、第一侧伸承载台63和第二侧伸承载台64均处于伸展状态,在x轴方向上,第一侧伸承载台63和第二侧伸承载台64大致位于叉体2的中部,第一侧伸承载台63和第二侧伸承载台64能支撑在货物或货物架底部的中央区域,从而使支撑点的分布更合理,进一步提高承载的稳定性。
45.参见图8和图9,叉体2通过升降装置18可升降地设置在机体1上,而设置在叉体2底部的支撑装置4包括支撑轮44,当叉体2上升或下降后,支撑轮44的位置也需要被调整,从以保证支撑轮44与地面有效接触,而支撑轮44的位置调节则通过连杆机构40和设置在机体1内的楔形件19的配合实现。
46.连杆机构40包括第一连杆41、第二连杆42和支架43、第一连杆41的第一延伸端与基础承载台5转动连接于第三轴心401,支架43的第一延伸端与基础承载台5转动连接于第四轴心402,第二连杆42的第一延伸端与第一连杆41的第二延伸端转动连接于第五轴心403,第二连杆42的第二延伸端与支架43的延伸中部转动连接于第六轴心404,支撑轮44转动连接在支架43的第二延伸端,即支架43的底部。连杆机构40还包括转动设置在第五轴心403处的滚轮45。
47.楔形件19沿高度方向固定设置在机体1的下部,楔形件19具有朝向连杆机构40的楔形面191,楔形面191沿高度方向延伸并逐渐向x轴正向倾斜,滚轮45的滚动表面抵接在楔形面191上。当叉体2上升,由于楔形件19固定而滚轮45上升,在楔形面191的导向下,第一连杆41沿第三轴心401向前摆动,同时,支架43沿第四轴心404向前摆动,从而下放支撑轮44。
48.另外,参见图3,叉体2还包括一块盖板59,盖板59遮盖在侧伸驱动机构、第一转盘63和第二转盘64上,盖板59的上表面590为支撑面,当盖板59安装到叉体2后,上表面590与基础承载面501处于同一水平面。盖板59的相对两侧均设置有一个避让缺口591,当第一侧伸承载台63处于第一收缩位置和第二侧伸承载台64处于第二收缩位置时,第一承载板65和第二承载板66分别位于两侧的两个避让缺口591中。
49.另外,本实用新型中,第一侧伸承载台和/或第二侧伸承载台沿叉体的宽度方向可伸缩地设置在基础承载台的相对两侧,其中“沿叉体的宽度方向可伸缩地设置”指第一侧伸承载台和第二侧伸承载台从收纳状态(第一收缩位置和第二收缩位置)变化至伸展状态(第一伸展位置和第二伸展位置)后,第一侧伸承载台和第二侧伸承载台在宽度方向上具有位移量。因此,“第一侧伸承载台和/或第二侧伸承载台沿叉体的宽度方向可伸缩地设置在基础承载台的相对两侧”包括但不仅包括第一侧伸承载台和第二侧伸承载台在宽度方向上沿直线运动而产生伸缩运动的技术方案,还包括如本实施例中的第一侧伸承载台和第二侧伸承载台通过旋转而产生宽度方向上的位移的技术方案。
50.其他实施例中,第一侧伸承载台或第二侧伸承载台可通过伸缩滚轮导轨安装在基础承载台上,通过电机控制,第一侧伸承载台或第二侧伸承载台则沿叉体的宽度方向直线伸缩运动。
51.其他实施例中,仅设置第一侧伸承载台而不设置第二侧伸承载台。
52.其他实施例中,在叉体的延伸方向上,第一侧伸承载台和/或第二侧伸承载台位于基础承载台的延伸中部。
53.最后需要强调的是,以上所述仅为本实用新型的优选实施例,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种变化和更改,凡在本实用新型
的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。