1.本实用新型涉及医疗信息化建设技术领域,具体为一种便于医疗信息化建设的物资识别装置。
背景技术:
2.医疗服务信息化是国际发展趋势。随着信息技术的快速发展,国内越来越多的医院正加速实施基于信息化平台、his系统的整体建设,以提高医院的服务水平与核心竞争力。
3.因此,医疗业务应用与基础网络平台的逐步融合正成为国内医院,尤其是大中型医院信息化发展的新方向,而医疗废旧物资的识别是医疗信息化建设过程中的重要环节。
4.现有的医疗物资识别装置大多利用扫描条形码的技术来识别废旧物资的种类,一旦废旧物资的条形码脱落,其便无法进行废旧物资的识别,由此导致其适用范围受限,另外,现有的医疗物资识别装置识别完成后需人工干预进行分类归纳,劳动强度大,自动化较低。
技术实现要素:
5.本实用新型针对现有技术中存在的技术问题,提供一种便于医疗信息化建设的物资识别装置来解决现有的医疗物资识别装置大多利用扫描条形码的技术来识别废旧物资的种类,一旦废旧物资的条形码脱落,其便无法进行废旧物资的识别,由此导致其适用范围受限,另外,现有的医疗物资识别装置识别完成后需人工干预进行分类归纳,劳动强度大,自动化较低的问题。
6.本实用新型解决上述技术问题的技术方案如下:一种便于医疗信息化建设的物资识别装置,包括支撑底座、安装架与识别筒,所述安装架焊接设置于支撑底座的顶面两侧位置,所述识别筒转动连接于安装架的内侧,所述安装架的顶端一体式固定有顶梁,所述顶梁的底面安装设置有超声波传感器,所述超声波传感器之间设置有微控制器,所述安装架的右侧壁内嵌设置有伺服电机,且安装架的左侧壁固定安装有深沟球轴承,所述深沟球轴承的内部固定穿插有穿插轴,所述识别筒的外周一体式固定有半圆挡板,所述半圆挡板的内部底面固定安装有荷重传感器,所述荷重传感器的顶面架设有载重板,所述支撑底座的顶面分别设置有第一收集箱与第二收集箱,所述第二收集箱位于第一收集箱的后端位置。
7.本实用新型的有益效果是:
8.该便于医疗信息化建设的物资识别装置效果更好,荷重传感器可通过微控制器判定医疗物资重量是否超限,超声波传感器则可通过微控制器判定医疗物资的长度与直径是否超限,无需条形码扫描识别,识别方式简单有效且准确,工作效率得到提升,实现成本更低、技术难度更小、识别效率更高的识别工作。
9.在上述技术方案的基础上,本实用新型还可以做如下改进。
10.进一步,所述载重板为“圆弧形”状,且载重板通过荷重传感器与半圆挡板固定连
接,所述荷重传感器与微控制器信号连接。
11.采用上述进一步方案的有益效果是,本实用新型通过设置有荷重传感器,医疗物资放置进识别筒内后,载重板受力向下运动,荷重传感器将受到的下压力处理后传递到微控制器分析,下压力超过微控制器预设值时,微控制器即判定该废旧物资为不可回收物资,无需条形码扫描识别,识别方式简单有效且准确,工作效率得到提升。
12.进一步,所述超声波传感器设置有四个,且四个超声波传感器两两对称设置于顶梁底面的左右两侧,所述超声波传感器与微控制器信号连接。
13.采用上述进一步方案的有益效果是,本实用新型通过设置有超声波传感器,医疗物资放置进识别筒内后,超声波传感器测得的距离发生变化,多个超声波传感器各自将测得的距离实时发送至微控制器,微控制器由此计算出变化后的距离与初始距离之间的差值,并根据该差值判定废旧物资的直径与长度,然后将废旧物资的直径、长度与设定值进行比较,由此根据比较结果判定废旧物资的直径与长度是否超限,实现成本更低、技术难度更小、识别效率更高的识别工作。
14.进一步,所述伺服电机通过输出轴与识别筒转动连接,所述微控制器与伺服电机的信号接收端信号连接。
15.采用上述进一步方案的有益效果是,本实用新型通过设置有伺服电机,微控制器判定到废旧物资直径、长度或重量超限时,向伺服电机传递信号,控制伺服电机逆时针转动,进而带动识别筒一同转动,进而将不可回收的物资倾倒至第一收集箱内,反之,微控制器则控制伺服电机顺时针转动,将可用的医疗物资倾倒至第二收集箱内,自动化强,结构简单,分类归纳方便快捷,省时省力。
16.进一步,所述第一收集箱与第二收集箱与支撑底座之间均为活动设置,且第一收集箱与第二收集箱以安装架为中心线呈前后对称设置。
17.采用上述进一步方案的有益效果是,本实用新型通过设置有第一收集箱与第二收集箱,第一收集箱与第二收集箱可实现对不可回收物资与可用医疗物资的分类归纳作用,实用性强,减少人工劳动强度。
18.进一步,所述识别筒通过穿插轴与深沟球轴承转动连接,且识别筒、伺服电机以及深沟球轴承均处于同一轴心。
19.采用上述进一步方案的有益效果是,本实用新型通过设置有深沟球轴承,识别筒转动时,穿插轴在深沟球轴承内一同转动,可减少识别筒与安装架之间的摩擦,减少磨损,且减少伺服电机功耗,有效节约资源。
20.进一步,所述支撑底座与安装架的底端为点焊式固定连接,且支撑底座的宽度为识别筒直径的三倍。
21.采用上述进一步方案的有益效果是,本实用新型通过设置有支撑底座,支撑底座的宽度远超出识别筒的直径大小,可有效防止识别筒旋转时发生倾翻,稳固性更高。
附图说明
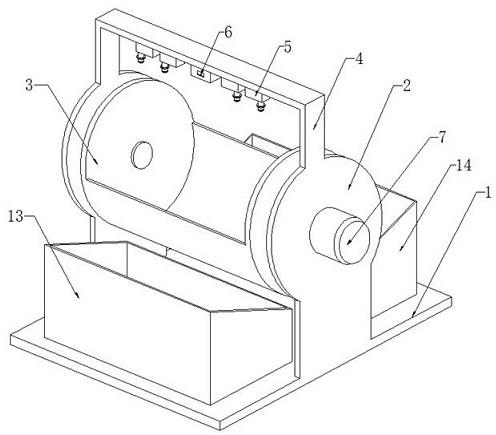
22.图1为本实用新型整体结构示意图;
23.图2为本实用新型安装架结构示意图;
24.图3为本实用新型识别筒结构示意图;
25.图4为本实用新型识别筒结构剖面图;
26.图5为本实用新型电路连接结构示意图。
27.附图中,各标号所代表的部件列表如下:
28.1、支撑底座;2、安装架;3、识别筒;4、顶梁;5、超声波传感器;6、微控制器;7、伺服电机;8、深沟球轴承;9、穿插轴;10、半圆挡板;11、荷重传感器;12、载重板;13、第一收集箱;14、第二收集箱。
29.其中,超声波传感器型号为dl
‑
s100r
‑
j(南京黎焱菲机械设备有限公司);微控制器型号为stm32f103vet6(深圳市赛尔通科技有限公司);伺服电机型号为apm
‑
sc10ank1(合肥辰越自动化工程有限公司);荷重传感器型号为stk8ba50
‑
s(深圳市广益达电子有限公司)。
具体实施方式
30.以下结合附图对本实用新型的原理和特征进行描述,所举实例只用于解释本实用新型,并非用于限定本实用新型的范围。
31.医疗业务应用与基础网络平台的逐步融合正成为国内医院,尤其是大中型医院信息化发展的新方向,而医疗废旧物资的识别是医疗信息化建设过程中的重要环节。
32.现有的医疗物资识别装置大多利用射频设别技术射频 称重识别技术来识别废旧物资的种类,均要求废旧物资必须带有条形码,一旦废旧物资的条形码脱落,其便无法进行废旧物资的识别,由此导致其适用范围受限,实用性较低,另外,现有的医疗物资识别装置识别完成后需人工干预进行分类归纳,劳动强度大,自动化较低,对此,本实用新型提供了一种便于医疗信息化建设的物资识别装置来解决上述技术问题。
33.本实用新型提供了以下优选的实施例
34.如图1、图2和图4所示,一种便于医疗信息化建设的物资识别装置,包括包括支撑底座1、安装架2与识别筒3,安装架2焊接设置于支撑底座1的顶面两侧位置,识别筒3转动连接于安装架2的内侧,安装架2的顶端一体式固定有顶梁4,顶梁4的底面安装设置有超声波传感器5,超声波传感器5之间设置有微控制器6,安装架2的右侧壁内嵌设置有伺服电机7,且安装架2的左侧壁固定安装有深沟球轴承8,深沟球轴承8的内部固定穿插有穿插轴9,识别筒3的外周一体式固定有半圆挡板10,半圆挡板10的内部底面固定安装有荷重传感器11,荷重传感器11的顶面架设有载重板12,支撑底座1的顶面分别设置有第一收集箱13与第二收集箱14,第二收集箱14位于第一收集箱13的后端位置。
35.本实施例中,如图4和图5所示,载重板12为“圆弧形”状,且载重板12通过荷重传感器11与半圆挡板10固定连接,荷重传感器11与微控制器6信号连接,医疗物资放置进识别筒3内后,载重板12受力向下运动,荷重传感器11将受到的下压力处理后传递到微控制器6分析,下压力超过微控制器6预设值时,微控制器6即判定该废旧物资为不可回收物资,无需条形码扫描识别,识别方式简单有效且准确,工作效率得到提升。
36.本实施例中,如图1和图5所示,超声波传感器5设置有四个,且四个超声波传感器5两两对称设置于顶梁4底面的左右两侧,超声波传感器5与微控制器6信号连接,医疗物资放置进识别筒3内后,超声波传感器5测得的距离发生变化,多个超声波传感器5各自将测得的距离实时发送至微控制器6,微控制器6由此计算出变化后的距离与初始距离之间的差值,
并根据该差值判定废旧物资的直径与长度,然后将废旧物资的直径、长度与设定值进行比较,由此根据比较结果判定废旧物资的直径与长度是否超限,实现成本更低、技术难度更小、识别效率更高的识别工作。
37.本实施例中,如图1和图3所示,伺服电机7通过输出轴与识别筒3转动连接,微控制器6与伺服电机7的信号接收端信号连接,微控制器6判定到废旧物资直径、长度或重量超限时,向伺服电机7传递信号,控制伺服电机7逆时针转动,进而带动识别筒3一同转动,进而将不可回收的物资倾倒至第一收集箱13内,反之,微控制器6则控制伺服电机7顺时针转动,将可用的医疗物资倾倒至第二收集箱14内,自动化强,结构简单,分类归纳方便快捷,省时省力。
38.本实施例中,如图1所示,第一收集箱13与第二收集箱14与支撑底座1之间均为活动设置,且第一收集箱13与第二收集箱14以安装架2为中心线呈前后对称设置,第一收集箱13与第二收集箱14可实现对不可回收物资与可用医疗物资的分类归纳作用,实用性强,减少人工劳动强度。
39.本实施例中,如图2和图3所示,识别筒3通过穿插轴9与深沟球轴承8转动连接,且识别筒3、伺服电机7以及深沟球轴承8均处于同一轴心,识别筒3转动时,穿插轴9在深沟球轴承8内一同转动,可减少识别筒3与安装架2之间的摩擦,减少磨损,且减少伺服电机7功耗,有效节约资源。
40.本实施例中,如图1和图2所示,支撑底座1与安装架2的底端为点焊式固定连接,且支撑底座1的宽度为识别筒3直径的三倍,支撑底座1的宽度远超出识别筒3的直径大小,可有效防止识别筒3旋转时发生倾翻,稳固性更高。
41.本实用新型的具体工作过程如下:
42.首先,将第一收集箱13与第二收集箱14分别放置于支撑底座1表面,第一收集箱13与第二收集箱14可实现对不可回收物资与可用医疗物资的分类归纳作用,实用性强,减少人工劳动强度,并将超声波传感器5开启,各个超声波传感器5各自将测得的初始距离实时发送至微控制器6。
43.紧接着,向识别筒3内放入需识别的医疗物资,医疗物资放置进识别筒3内后,载重板12受力向下运动,荷重传感器11将受到的下压力处理后传递到微控制器6分析,下压力超过微控制器6预设值时,微控制器6即判定该废旧物资为不可回收物资,无需条形码扫描识别,识别方式简单有效且准确,工作效率得到提升。
44.同时,超声波传感器5测得的距离发生变化,多个超声波传感器5各自将测得的距离实时发送至微控制器6,微控制器6由此计算出变化后的距离与初始距离之间的差值,并根据该差值判定废旧物资的直径与长度,然后将废旧物资的直径、长度与设定值进行比较,由此根据比较结果判定废旧物资的直径与长度是否超限,实现成本更低、技术难度更小、识别效率更高的识别工作。
45.最后,微控制器6判定到废旧物资直径、长度或重量超限时,向伺服电机7传递信号,控制伺服电机7逆时针转动,进而带动识别筒3一同转动,进而将不可回收的物资倾倒至第一收集箱13内,反之,微控制器6则控制伺服电机7顺时针转动,将可用的医疗物资倾倒至第二收集箱14内,自动化强,结构简单,分类归纳方便快捷,省时省力。
46.以上所述仅为本实用新型的较佳实施例,并不用以限制本实用新型,凡在本实用
新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。