1.本实用新型涉及起重设备运行控制技术领域,具体为一种起重机障碍检测系统。
背景技术:
2.本部分的陈述仅仅是提供了与本实用新型相关的背景技术信息,不必然构成在先技术。
3.桥式起重机(俗称,天车)是工业领域常用的起重设备,主要用于搬运重型货物,以减轻工人负担,提高作业效率。目前大多数工厂主要通过工人遥控或驾驶天车搬运货物,并且天车作业环境复杂,不仅障碍物众多,还会与工人的工作环境相互重叠。天车操作员在操作天车时需时刻观察天车周围的环境,避免天车与包括人在内的障碍物碰撞,整个过程完全依赖天车操作员的经验和注意力是否集中,安全隐患极大。天车在运行过程中无论碰撞到环境中的其它障碍物还是碰撞到人都会造成严重事故。
技术实现要素:
4.为了解决上述背景技术中存在的技术问题,本实用新型提供一种起重机障碍检测系统。
5.为了实现上述目的,本实用新型采用如下技术方案:
6.本实用新型的第一个方面提供一种起重机障碍检测系统,包括与轨道滑动连接的小车,小车安装传感器支架,且随小车运动,整个支架相对于小车几何中心呈中心对称,传感器支架上安装二维感知模块、三维感知模块和单点感知模块。
7.传感器支架上安装交换机、工业控制计算机和天车plc;
8.或,小车安装交换机和工业控制计算机,大车电气柜内安装天车plc;
9.或,小车控制箱内设有交换机和工业控制器,大车电气柜内安装天车plc。
10.传感器支架包括,至少两组平行布置的第一横梁,两组第一横梁两端分别与两组第一纵梁连接,第一纵梁和第一横梁的几何中心与小车几何中心重合。
11.第一横梁朝向远离小车几何中心的位置具有相互平行的至少两组第二横梁。
12.三维感知模块包括位于第二横梁末端的至少两组三维激光传感器,两组三维激光传感器沿小车几何中心对称设置且两组三维激光传感器发出覆盖小车两侧范围的信号。
13.二维感知模块包括位于第一横梁和第二横梁中部的至少四组二维激光传感器,四组二维激光传感器沿小车几何中心两两对称布置,四组二维激光传感器发出覆盖小车四周范围的信号。
14.单点感知模块包括位于第一横梁和第二横梁中部的至少四组单点激光传感模组,四组单点激光传感模组沿小车几何中心两两对称布置,四组单点激光传感器发出覆盖小车四周范围的信号。
15.单点激光传感模组包括垂直向地面方向发射激光的垂直激光传感器和以一定的角度向吊运货物底部发射激光的倾斜激光传感器。
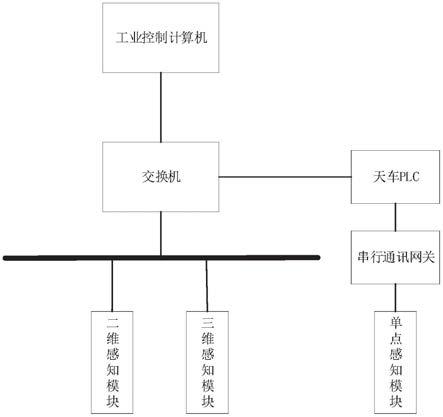
16.二维感知模块、三维感知模块和单点感知模块获取障碍物位置信息经交换机传递给工业控制计算机,整合后的障碍物位置信息传递给天车plc。
17.与现有技术相比,以上一个或多个技术方案存在以下有益效果:
18.1、通过二维感知模块构建激光防护幕墙,进行安全区域入侵检测,确保天车安全运行。
19.2、通过三维感知模块拓展系统感知范围,获取小车四周三维空间内障碍物位置信息。
20.3、通过单点感知模块为二维感知模块加一项保险措施,确保二维感知模块或工业计算机故障时天车仍具备感知能力,同时确保天车升降过程中的安全运行。
附图说明
21.构成本实用新型的一部分的说明书附图用来提供对本实用新型的进一步理解,本实用新型的示意性实施例及其说明用于解释本实用新型,并不构成对本实用新型的不当限定。
22.图1是本实用新型一个或多个实施例提供的系统结构示意图;
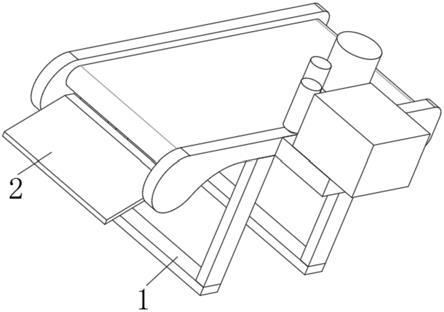
23.图2是本实用新型一个或多个实施例提供的天车整体结构示意;
24.图3是本实用新型一个或多个实施例提供的传感器支架正视结构示意图;
25.图4是本实用新型一个或多个实施例提供的传感器支架侧视结构示意图;
26.图5是本实用新型一个或多个实施例提供的传感器布置位置示意图;
27.图中:1.三维激光传感器a,2.三维激光传感器b,3.小车,31.货物,4.传感器支架,40.小车几何中心,41.主梁,42.底梁,43.立柱,421.第一横梁,422.第一纵梁,423.第二横梁,424.第一边梁,425.第二边梁,5.垂直激光传感器a,6.垂直激光传感器b,7.垂直激光传感器c,8.垂直激光传感器d,9.倾斜激光传感器a,10.二维激光传感器a,11.二维激光传感器b,12.倾斜激光传感器b,13.二维激光传感器c,14.倾斜激光传感器c,15.倾斜激光传感器d,16.二维激光传感器d。
具体实施方式
28.下面结合附图与实施例对本实用新型作进一步说明。
29.应该指出,以下详细说明都是示例性的,旨在对本实用新型提供进一步的说明。除非另有指明,本文使用的所有技术和科学术语具有与本实用新型所属技术领域的普通技术人员通常理解的相同含义。
30.需要注意的是,这里所使用的术语仅是为了描述具体实施方式,而非意图限制根据本实用新型的示例性实施方式。如在这里所使用的,除非上下文另外明确指出,否则单数形式也意图包括复数形式,此外,还应当理解的是,当在本说明书中使用术语“包含”和/或“包括”时,其指明存在特征、步骤、操作、器件、组件和/或它们的组合。
31.以安装在某酿酒厂厂房屋顶的起重机(俗称,天车)为例,进一部说明系统的硬件结构,该系统可以在天车吊运货物周围建立激光防护幕墙,从而构建安全防护区,以保证天车在运行过程中不会有障碍物进入此区域内;并且该系统可以检测小车周围一定三维空间内的障碍物,获得障碍物三维位置信息;该系统可以检测小车吊运货物下方的障碍物情况,
避免货物下降过程中碰撞障碍物。
32.实施例一:
33.如图1
‑
5所示,一种起重机障碍检测系统,包括与轨道滑动连接的小车3,小车3安装传感器支架4,随小车3运动,整个支架相对于小车几何中心40呈中心对称,传感器支架4上安装二维感知模块、三维感知模块和单点感知模块。二维感知模块、三维感知模块和单点感知模块获取小车周围一定空间内的障碍物位置信息,将其传递给工业控制计算机,运算后的位置信息结果经交换机传递给天车plc,发出报警或自动停车,操作员根据反馈结果做出相应操作。
34.系统的具体架构如下:
35.1、工业控制计算机:工业控制计算机通过交换机获得二维感知模块、三维感知模块、单点感知模块的传感信息,并对传感器信息进行运算,将运算后的结果通过交换机传给天车plc,是系统的计算中心。工业控制计算机安装在小车上,随小车运动。
36.2、交换机:交换机是系统的通信枢纽,工业控制计算机通过交换机获取二维、三维感知模块信息,并将根据信息计算后得到的障碍物相关结果通过交换机传输给天车plc。交换机安装在小车上,随小车运动。
37.3、二维感知模块:二维感知模块由四个二维激光传感器组成,并通过交换机与工业控制计算机相连接。四个二维激光传感器分别通过传感器支架4安装在小车的四面,二维激光传感器垂直向地面方向发射激光,单个二维激光传感器可形成一面激光防护幕墙,四个二维激光传感器可形成四面激光防护幕墙,从而构成一个激光防护立方体,通过合理的传感器安装布局设计可以将搬运货物包裹在激光防护幕墙构成的安全区域内,只要有异物入侵安全区域,工业计算机便可通过对二维感知模块传感信息的计算获得异物入侵安全区域的结果,从而将结果传给天车plc,以控制天车运行,防止碰撞障碍物。
38.例如,二维感知模块传感器的布局如图5所示,标号10、11、13、16处对应的位置分别安装二维激光传感器a
‑
d,使其分别布局于小车的四面。针对酿酒厂房吊运货物的实际情况,传感器支架的长为2.6米,宽为3.45米。
39.4、三维感知模块:三维感知模块由两个三维激光传感器组成,并通过交换机与工业控制计算机相连。两个三维激光传感器分别通过传感器支架4安装在小车的两侧,三维激光垂直于地面方向安装,一个三维激光的视野可以覆盖小车一侧的部分三维空间,两个三维激光可以覆盖小车周围的大部分区域。当有障碍物进入三维感知模块的检测区域时,工业计算机便可通过对三维感知模块传感信息的计算获得障碍物的三维位置信息,从而将位置信息传给天车plc,以控制天车运行,防止碰撞障碍物。
40.例如,三维感知模块传感器的布局如图5所示,标号1、2处对应的位置分别安装三维激光传感器a和b,使其分别布局于小车的两侧。
41.5、单点感知模块:单点感知模块由8个单点激光传感器组成,并通过串行通讯网关与天车plc相连,单点激光只能感知某一点的距离信息。
42.该模块的布局如图5所示,其中5、9、6、12、7、14、8、15处对应的位置分别安装单点激光传感器。5、6、7、8处的单点激光垂直向地面方向发射激光,以检测四个点位置处是否有障碍物,安装这四个单点激光的目的是为了在二维感知模块或工业计算机故障时天车仍具备一定的障碍物感知能力,是一种保险措施,即5、6、7、8处分别为垂直激光传感器a
‑
d。9、
12、14、15处的单点激光以一定的角度向吊运货物底部发射激光,且只在货物升降过程中发挥作用,防止天车在吊运货物升降过程中碰撞障碍物,即9、12、14、15处分别为倾斜激光传感器a
‑
d。
43.通过二维感知模块构建激光防护幕墙,进行安全区域入侵检测,确保天车安全运行;并且通过三维感知模块拓展系统感知范围,获取小车四周三维空间内障碍物位置信息;通过单点感知模块为二维感知模块加一项保险措施,确保二维感知模块或工业计算机故障时天车仍具备感知能力,同时确保天车升降过程中的安全运行。
44.本实施例中的传感器支架4结构为,包括平行布置的主梁41和底梁42,二者之间通过至少一组平行设置的立柱43连接,从而确保强度足够高能够承担多个激光传感器的重量。
45.本实施例中的底梁42包括,至少两组平行布置的第一横梁421,两组第一横梁421两端分别被两组第一纵梁422连接,第一纵梁422和第一横梁421的几何中心与小车几何中心40重合;
46.第一纵梁422用于连接二维激光传感器和倾斜激光传感器;
47.第一横梁421朝向远离小车几何中心40的位置具有相互平行的至少两组第二横梁423,每一组第二横梁423通过中间梁与对应的第一横梁421连接,第二横梁423位于第一横梁421一侧的中部;
48.第二横梁423的中部具有第一边梁424,本实施例中第一边梁424具有两组,沿着两组第一横梁421的轴线对称布置,用于连接二维激光传感器和倾斜激光传感器;
49.第一纵梁422沿着与第一横梁421的交点伸出至与第二横梁423连接的交点处具有第二边梁425,本实施例中第二边梁425具有两组,且沿着小车几何中心40中心对称设置,两组第二边梁425用于连接三维感知模块中的三维激光传感器a1和三维激光传感器b2。
50.本实施例中的三维感知模块包括三维激光传感器a1和三维激光传感器b2,分别位于第一横梁421和第一纵梁422的交点处的第二边梁425处,两个个三维激光传感器位于在小车3的两侧,发出的三维激光垂直于地面方向,一个三维激光的视野可以覆盖小车一侧的部分三维空间,两个三维激光可以覆盖小车周围的大部分区域。
51.本实施例中的二维感知模块包括,位于第一纵梁422中部的二维激光传感器a10和二维激光传感器b11,以及位于第二横梁423中部的二维激光传感器c13和二维激光传感器d16;二维激光传感器垂直向地面方向发射激光,单个二维激光传感器可形成一面激光防护幕墙,四个二维激光传感器可形成四面激光防护幕墙,从而构成一个激光防护立方体,可以将搬运货物31包裹在激光防护幕墙构成的安全区域内,只要有异物入侵安全区域,工业计算机便可通过对二维感知模块传感信息的计算获得异物入侵安全区域的结果。
52.本实施例中的单点感知模块包括,位于第一纵梁422中心处的垂直激光传感器a5和垂直激光传感器b6,以及位于第二横梁423中心处的垂直激光传感器c7和垂直激光传感器d8;四组垂直激光传感器垂直向地面方向发射激光,以检测四个点位置处是否有障碍物,安装这四个单点激光的目的是为了在二维感知模块或工业计算机故障时天车仍具备一定的障碍物感知能力,是一种保险措施。
53.本实施例中的单点感知模块还包括,位于第一纵梁422中部的倾斜激光传感器a9和倾斜激光传感器b12,以及位于第二横梁423中部的倾斜激光传感器c14和倾斜激光传感
器d15;四组倾斜激光传感器以一定的角度向吊运货物31底部发射激光,且只在货物升降过程中发挥作用,防止天车在吊运货物升降过程中碰撞障碍物。
54.本实施例中的传感器支架4的具体结构不受限制,能够随小车运动并且强度能够满足各激光传感器的载荷即可。也可以为带有若干立柱的矩形支架,例如,矩形支架的一组对角布置两个三维激光传感器,其余的二维激光传感器和单点激光传感器分布在矩形支架的四条边上,通过二维感知模块构建激光防护幕墙,进行安全区域入侵检测,确保天车安全运行;并且通过三维感知模块拓展系统感知范围,获取小车四周三维空间内障碍物位置信息通过单点感知模块为二维感知模块加一项保险措施,确保二维感知模块或工业计算机故障时天车仍具备感知能力,同时确保天车升降过程中的安全运行。
55.以上所述仅为本实用新型的优选实施例而已,并不用于限制本实用新型,对于本领域的技术人员来说,本实用新型可以有各种更改和变化。凡在本实用新型的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。