1.本实用新型涉及教育智能机器人技术领域,具体为一种具有自动检测障碍功能的教育智能机器人。
背景技术:
2.随着科技的发展,互联网的普及,智能机器人的应用范围也越来越广泛,其中,教育型智能机器人较为常见,在儿童的学习方面,教育型智能机器人可以起到很好的辅助作用,但是现有的教育型智能机器人存在以下几个问题:
3.1、没有自动检测障碍的功能,不方便教育智能机器人在地面上移动,容易倾倒;
4.2、不便于使用者拆卸教育智能机器人,对内部物体进行检修,降低机器人的使用寿命。
5.针对上述问题,急需在原有具有自动检测障碍功能的教育智能机器人的基础上进行创新设计。
技术实现要素:
6.本实用新型的目的在于提供一种具有自动检测障碍功能的教育智能机器人,以解决上述背景技术中提出现有的教育智能机器人,没有自动检测障碍功能,不便于使用者拆卸机器人的问题。
7.为实现上述目的,本实用新型提供如下技术方案:一种具有自动检测障碍功能的教育智能机器人,包括机器人本体、定位块和万向轮,所述机器人本体的内壁设置有主板,且主板的上方安装有第一导线,并且第一导线的端头处连接有播放单元,所述播放单元的底部设置有盖板,且盖板的边侧安装有限位块,并且限位块的外侧嵌套有第一弹簧,所述定位块固定于机器人本体的外侧,且定位块的中间位置安装有触碰板,并且触碰板的外侧设置有第二弹簧,所述触碰板的底部安装有拉绳,且拉绳的外侧设置有套筒,并且拉绳的端头连接有滑块,所述滑块的外侧嵌套有第三弹簧,且滑块的端头处设置有开关,并且开关的外侧安装有第二导线,所述第二导线的端头连接有报警单元,所述万向轮安装于机器人本体的底部。
8.优选的,所述限位块与机器人本体通过第一弹簧构成滑动安装结构,且限位块关于盖板的中线对称设置有2个。
9.优选的,所述触碰板与机器人本体通过第二弹簧构成转动安装结构,且触碰板等角度分布在机器人本体的外侧。
10.优选的,所述拉绳的外径与套筒的内径相同,且套筒与机器人本体为胶水连接。
11.优选的,所述滑块与机器人本体通过拉绳构成滑动安装结构,且滑块的端头采用弧形设置。
12.优选的,所述万向轮与机器人本体构成滚动安装结构,且万向轮关于机器人本体的水平中线和垂直中线分别对称设置有2个。
13.与现有技术相比,本实用新型的有益效果是:该具有自动检测障碍功能的教育智能机器人,便于自动检测障碍,且便于使用者拆卸,对机器人内部进行检修;
14.1.机器人本体的底部安装有万向轮,方便机器人在地面上移动,当机器人本体遇到障碍物时,障碍物挤压碰撞板,碰撞板围绕定位块发生转动,碰撞板底部的拉绳开始松动,拉绳的另一端连接有滑块,滑块受第三弹簧作用开始移动,滑块顶住开关,开关将信号通过第二导线传输到报警单元上,报警单元开始鸣叫,提醒使用者机器人本体遇到障碍物,便于保护机器人本体,避免机器人本体倾倒的几率;
15.2.当机器人本体长时间使用后,使用者需要对机器人进行检修,拔动限位块,限位块脱离盖板,盖板不受限位块的挤压后可以被掀开,使用者对内部的零件进行检修,延长教育智能机器人的使用寿命。
附图说明
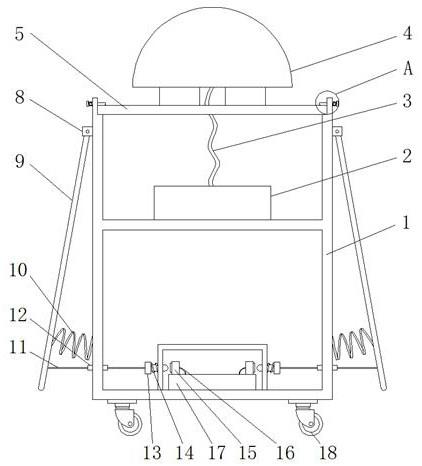
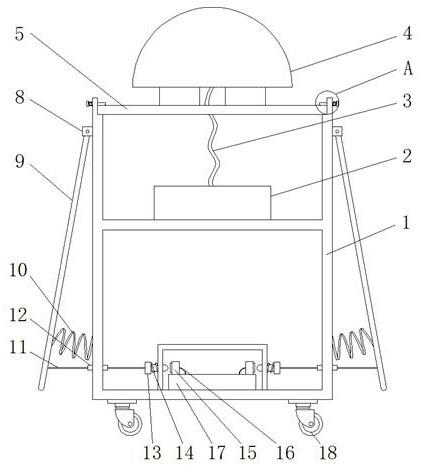
16.图1为本实用新型整体正视结构示意图;
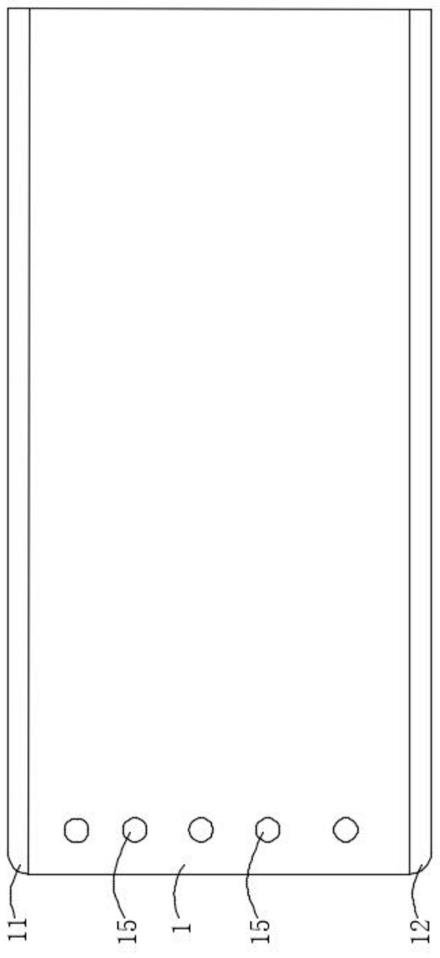
17.图2为本实用新型整体俯视结构示意图;
18.图3为本实用新型图1中a处放大结构示意图;
19.图4为本实用新型第二弹簧与触碰板连接结构示意图。
20.图中:1、机器人本体;2、主板;3、第一导线;4、播放单元;5、盖板;6、限位块;7、第一弹簧;8、定位块;9、触碰板;10、第二弹簧;11、拉绳;12、套筒;13、滑块;14、第三弹簧;15、开关;16、第二导线;17、报警单元;18、万向轮。
具体实施方式
21.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
22.请参阅图1
‑
4,本实用新型提供一种技术方案:一种具有自动检测障碍功能的教育智能机器人,包括机器人本体1、主板2、第一导线3、播放单元4、盖板5、限位块6、第一弹簧7、定位块8、触碰板9、第二弹簧10、拉绳11、套筒12、滑块13、第三弹簧14、开关15、第二导线16、报警单元17和万向轮18,机器人本体1的内壁设置有主板2,且主板2的上方安装有第一导线3,并且第一导线3的端头处连接有播放单元4,播放单元4的底部设置有盖板5,且盖板5的边侧安装有限位块6,并且限位块6的外侧嵌套有第一弹簧7,定位块8固定于机器人本体1的外侧,且定位块8的中间位置安装有触碰板9,并且触碰板9的外侧设置有第二弹簧10,触碰板9的底部安装有拉绳11,且拉绳11的外侧设置有套筒12,并且拉绳11的端头连接有滑块13,滑块13的外侧嵌套有第三弹簧14,且滑块13的端头处设置有开关15,并且开关15的外侧安装有第二导线16,第二导线16的端头连接有报警单元17,万向轮18安装于机器人本体1的底部;
23.进一步的,限位块6与机器人本体1通过第一弹簧7构成滑动安装结构,且限位块6关于盖板5的中线对称设置有2个,通过在盖板5的边侧设置2个限位块6,便于将盖板5固定在机器人本体1的上方,便于使用者拆卸和安装;
24.进一步的,触碰板9与机器人本体1通过第二弹簧10构成转动安装结构,且触碰板9等角度分布在机器人本体1的外侧,通过在机器人本体1的外侧设置多个触碰板9,使得机器人本体1外侧各个方向受到碰撞时都可以检测到障碍物,提高检测效率;
25.进一步的,拉绳11的外径与套筒12的内径相同,且套筒12与机器人本体1为胶水连接,使得拉绳11保持水平方向移动,提高设备运行的稳定性;
26.进一步的,滑块13与机器人本体1通过拉绳11构成滑动安装结构,且滑块13的端头采用弧形设置,滑块13受第三弹簧14作用推动开关15,触发报警单元17,提醒使用者机器人本体1遇到障碍物;
27.进一步的,万向轮18与机器人本体1构成滚动安装结构,且万向轮18关于机器人本体1的水平中线和垂直中线分别对称设置有2个,通过在机器人本体1的底部安装有4个万向轮18,便于机器人本体1的移动。
28.工作原理:在使用该具有自动检测障碍功能的教育智能机器人时,机器人本体1的底部安装有万向轮18,方便机器人在地面上移动,当机器人本体1遇到障碍物时,障碍物挤压碰撞板,碰撞板围绕定位块8发生转动,碰撞板底部的拉绳11开始松动,拉绳11的另一端连接有滑块13,滑块13受第三弹簧14作用开始移动,滑块13顶住开关15,开关15将信号通过第二导线16传输到报警单元17上,报警单元17开始鸣叫,提醒使用者机器人本体1遇到障碍物,便于保护机器人本体1,避免机器人本体1倾倒的几率,当机器人本体1长时间使用后,使用者需要对机器人进行检修,拔动限位块6,限位块6脱离盖板5,盖板5不受限位块6的挤压后可以被掀开,使用者对内部的零件进行检修,延长教育智能机器人的使用寿命。
29.最后应当说明的是,以上内容仅用以说明本实用新型的技术方案,而非对本实用新型保护范围的限制,本领域的普通技术人员对本实用新型的技术方案进行的简单修改或者等同替换,均不脱离本实用新型技术方案的实质和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。