1.本发明属于配电站房除湿技术领域,具体涉及配电站房智能除湿机器人系统及其方法。
背景技术:
2.电力在运输的过程是以高压的形式进行运输的,在经过配电设备转换成用户使用的标准电压然后才输送到每个人的家里,因此需要配置一个配电房,不过为了安全起见一般情况下配电房都是建立在远离居民或偏僻的地方,这就造成了配电房的环境会比较差可能会很潮湿,为了能够保障每个客户都能用到电,配电房一定要做好防潮除湿的工作,经过长期湿气的侵蚀会造成配电房里设备寿命减少,因为现在的设备多是金属制成的,长期受湿气危害容易生锈这样就会对设备造成危害从而影响到使用的寿命,平白增加维护的费用,特别是这些设备在湿度高的环境下工作不仅效率降低还会增加损耗的速度,配电房是分配和转压电流电压的地方,而水是一种导体,这就容易造成设备工作时容易发生短路的情况,严重的可能会发生火灾漏电等安全问题,尤其是南方和沿海城市,这些城市相对内部的城市来说湿气很大,为了避免因受潮而造成的跳闸短路等问题,现有的配电站房中除湿工作都是人工通过除湿机统一在规定的周期内进行,也就存在重复的工作量,有些配电站房湿度达不到除湿的需要,因此浪费人工的浪费,无法达到无人值守的配电站房标准,因此需要研发一种新型的除湿系统和方法来解决现有的问题。
技术实现要素:
3.本发明的目的在于提供一种配电站房智能除湿机器人系统及其方法,以解决配电站房除湿无法实现无人值守的问题。
4.为实现上述目的,本发明提供如下技术方案:一种配电站房智能除湿机器人系统,包括内部设置有除湿装置的除湿箱体、用于获取扫描环境的轮廓信息的激光扫描雷达、用于使所述除湿箱体移动的伺服舵轮、根据激光扫描雷达采集轮廓信息建立导航地图的地图管理模块、通过地图管理模块的数据规划行走路径发送给执行指令给伺服舵轮的运动导航控制系统;所述地图管理模块设置有深度学习和视觉即时定位与地图构建系统;所述地图管理模块、运动导航控制系统均与中央控制处理中心相连接,所述中央控制处理中心接收机器无线通讯模块的湿度采集数据,并把温度采集数据处理后将执行命令发送给运动导航控制系统;所述机器无线通讯模块接收湿度采集终端的采集湿度信号,所述湿度采集终端包括用于感知环境中湿度信号的湿度传感器、对所述湿度传感器的湿度信号进行数模转换并处理的湿度微处理器、与湿度微处理器相连接并把湿度数据发送给中央控制处理中心的湿度无线通讯模块。
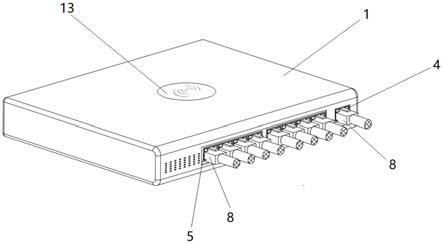
5.优选的,所述除湿箱体上设置有可调节采集平台,所述可调节采集平台上设置有
用于探测物体距离的深度摄像头以及所述激光扫描雷达,所述深度摄像头设置有四个,并呈同一水平面分布,实现了360度的探测。
6.优选的,所述伺服舵轮设置有四个,并分别安装于承载底座下端面,所述承载底座的上端面与除湿箱体的相连接,且所述承载底座的侧面设置有若干超声波传感器,所述超声波传感器用于在承载底座移动时通过发送和接收超声波判断物体与承载底座的距离,防止在行走过程中碰撞到物体。
7.优选的,所述伺服舵轮包括与运动导航控制系统相连接并执行其发出指令的伺服舵轮控制器、与伺服舵轮控制器相连接的转向电机和驱动电机、与驱动电机转动连接的车轮,所述伺服舵轮内设置有用于计量距离的行走编码器,使用四个均可驱动,提高了行走过程中的灵活性。
8.优选的,四个所述车轮上均设置有用于行车防滑的纹路,其中,两个所述车轮的纹路呈“八”字型分布,解决了配电站房内湿度较大时,地面湿滑导致车轮空转导致计量不准确,使规划路径不准确的问题。
9.优选的,所述激光扫描雷达和深度摄像头均与信号汇聚模块相连接,所述信号汇聚模块与中央控制处理中心相连接,并将采集到的数据发送给中央控制处理中心进行数据分析和处理,所述信号汇聚模块还与辅助传感器相连接,所述辅助传感器包括所述超声波传感器、防跌落传感器、碰撞传感器,通过多种探测传感器,提高了机器人的行走时的安全性。
10.优选的,所述超声波传感器设置有若干,并同一直线分布安装于承载底座的侧面,所述防跌落传感器安装于承载底座的侧面的下方,与承载底座的下端面齐平,所述承载底座侧面安装有若干所述碰撞传感器,所述碰撞传感器的突出于承载底座表面,并分布于相邻两个超声波传感器之间,所述碰撞传感器的安装在承载底座高度的4/5处,通过对碰撞传感器位置的改进,使机器人在行走过程中能够更好的探测信号,提高机器人行走的准确性。
11.优选的,所述可调节采集平台与除湿箱体以及承载底座呈同轴分布,且所述可调节采集平台的上端面中心点安装激光扫描雷达,所述激光扫描雷达的安装与可调节采集平台的上端面的形成的倾角不超过2度,所述可调节采集平台的上端面设置有弧形的圆角,且弧形面未落入所述激光扫描雷达的扫描角度内,通过对安装角度的优化,使扫描时没有死角,提高了建图时的效率。
12.优选的,所述中央控制处理中心还与除湿控制模块相连接,所述除湿控制模块与设置在除湿箱体内的除湿装置相连接,所述除湿装置的进风管道与设置在除湿箱体的进风口相连接,所述除湿装置的出风管道与设置在除湿箱体的出风口相连接,所述进风口分布设置于除湿箱体的中间位置,所述除湿箱体上设置有散热孔,通过散热的使用,减少了机器人运行时的故障率。
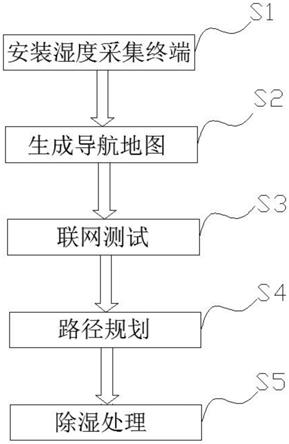
13.本发明另提供一种配电站房智能除湿机器人系统的使用方法,包括以下步骤:s1、安装湿度采集终端,在配电站房内根据需要安装至少一个湿度采集终端;s2、生成导航地图,启动激光扫描雷达,清除配电站房待扫区域中经常移动的物体,并在扫描平面处贴上不影响雷达正常扫描的材料,选择配电站房没人或者人较少的时间点进行扫图,在地图管理模块中初次建图后,在机器人可能的行走路径上,扫描周围360度的区域,获得激光匹配的参照点构建完整的地图;
s3、联网测试,所述湿度采集终端与机器人系统的联网测试,根据信号的强弱与深度摄像头的测量数据在地图中标记出湿度采集终端的位置;s4、路径规划,若所述中央控制处理中心接到湿度采集终端采集的湿度值超过阀值,所述地图管理模块根据湿度采集终端的位置规划行走的路径,同时运动导航控制系统根据路径计算行走距离,并把数据发送给伺服舵轮,所述伺服舵轮按照规划路径转动,驱动承载底座移动,使除湿箱体随承载底座移动,在移动过程中,所述辅助传感器、深度摄像头将实时的采集数据发送给中央控制处理中心,中央控制中心进行计算,判断在移动过程中发生碰撞的路径,从而发生修正指令;s5、除湿处理,当到达数据达到阀值的湿度采集终端附近时,启动除湿箱体内的除湿装置,使湿气从进风口进入到除湿装置中,并将除湿后的空气从排气口排出,除湿完成后,除湿机器人回归到初始位置,并把此作业过程通过机器无线通讯模块发送给配电站房服务器。
14.本发明的技术效果和优点:该配电站房智能除湿机器人系统及其方法,通过传感器信号汇聚、运动导航控制系统及传感器装置,以即时定位与地图构建为基础,通过装置自身传感器绘制配电房地图,准确的知道自身当前位置和湿度传感器检测区域,实现除湿路线精确导航和完整覆盖,实际应用中配合布置在配电站房不同位置的湿度传感器的信号,自动判断相应区域是否需要进行除湿控制,计算路线并自行前往,完成除湿动作后回归原位,真正实现除湿机在新型智慧站房里的智能和有效应用。
附图说明
15.图1为本发明的流程图;图2为本发明的框架图;图3为本发明湿度采集终端的框架图;图4为本发明除湿机器人的正视图;图5为本发明除湿机器人的左视图;图6为本发明a处的放大图。
16.图中:1、除湿箱体;2、承载底座;11、进风口;12、散热孔;21、超声波传感器;3、伺服舵轮;31、车轮;32、伺服舵轮控制器;4、可调节采集平台;41、深度摄像头;42、激光扫描雷达;5、湿度采集终端;51、湿度传感器;52、湿度微处理器;53、湿度无线通讯模块;61、中央控制处理中心;62、地图管理模块;63、机器无线通讯模块;64、除湿控制模块;65、运动导航控制系统;66、信号汇聚模块;67、辅助传感器;671、防跌落传感器;672、碰撞传感器。
具体实施方式
17.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
18.本发明提供了如图1
‑
图6中所示的一种配电站房智能除湿机器人系统,包括内部设置有除湿装置的除湿箱体1、用于获取扫描环境的轮廓信息的激光扫描雷达42、用于使所
述除湿箱体1移动的伺服舵轮3、根据激光扫描雷达42采集轮廓信息建立导航地图的地图管理模块62、通过地图管理模块62的数据规划行走路径发送给执行指令给伺服舵轮3的运动导航控制系统65;所述伺服舵轮3包括与运动导航控制系统65相连接并执行其发出指令的伺服舵轮控制器32、与伺服舵轮控制器32相连接的转向电机和驱动电机、与驱动电机转动连接的车轮31,所述伺服舵轮3内设置有用于计量距离的行走编码器,行走编码器的分辨率需要在1mm以下,且总误差最多不能超过5%,本实施例中,所述伺服舵轮3设置有四个,并分别安装于承载底座2下端面,所述承载底座2的上端面与除湿箱体1的相连接,且所述承载底座2的侧面设置有若干超声波传感器21,所述超声波传感器21用于在承载底座2移动时通过发送和接收超声波判断物体与承载底座2的距离,本实施例中,四个所述车轮31上均设置有用于行车防滑的纹路,其中,两个所述车轮31的纹路呈“八”字型分布;所述除湿箱体1上设置有可调节采集平台4,所述可调节采集平台4设置有用于探测物体距离的深度摄像头41以及所述激光扫描雷达42,本实施例中,所述深度摄像头41设置有四个,并呈同一水平面分布;所述可调节采集平台4与除湿箱体1以及承载底座2呈同轴分布,且所述可调节采集平台4的上端面中心点安装激光扫描雷达42,所述激光扫描雷达42安装与可调节采集平台4的上端面的形成的倾角不超过2度,所述可调节采集平台4的上端面设置有弧形的圆角,且弧形面未落入所述激光扫描雷达42的扫描角度内;所述地图管理模块62设置有深度学习和视觉即时定位与地图构建系统;通过深度学习和视觉即时定位与地图的构建,使建图时更加智能,自学习功能使建图更加智能化;所述地图管理模块62、运动导航控制系统65均与中央控制处理中心61相连接,所述中央控制处理中心61接收机器无线通讯模块63的湿度采集数据,并把温度采集数据处理后将执行命令发送给运动导航控制系统65;所述机器无线通讯模块63接收湿度采集终端5的采集湿度信号,所述湿度采集终端5包括用于感知环境中湿度信号的湿度传感器51、对所述湿度传感器51的湿度信号进行数模转换并处理的湿度微处理器52、与所述湿度微处理器52相连接并把湿度数据发送给所述中央控制处理中心61的湿度无线通讯模块53;所述激光扫描雷达42和深度摄像头41均与信号汇聚模块66相连接,所述信号汇聚模块66与中央控制处理中心61相连接,并将采集到的数据发送给中央控制处理中心61进行数据分析和处理,所述信号汇聚模块66还与辅助传感器67相连接,所述辅助传感器67包括所述超声波传感器21、防跌落传感器671、碰撞传感器672。所述超声波传感器21设置有若干,并同一直线分布安装于承载底座2的侧面,所述防跌落传感器671安装于承载底座2的侧面的下方,与承载底座2的下端面齐平,提高了探测的精度,所述承载底座2侧面安装有若干所述碰撞传感器672,所述碰撞传感器672突出于承载底座2表面,并分布于相邻两个超声波传感器21之间,本实施例中,所述碰撞传感器672的安装在承载底座2高度的4/5处,可以提前触碰到不同物体的高度。所述中央控制处理中心61还与除湿控制模块64相连接,所述除湿控制模块64与设置在除湿箱体1内的除湿装置相连接,所述除湿装置的进风管道与设置在除湿箱体1的进风口11相连接,所述除湿装置的出风管道与设置在除湿箱体1的出风口相连接,所述进风口11分布设置于除湿箱体1的中间位置,所述除湿箱体1上设置有散热孔12,本实施例中,散热孔12设置在除湿箱体1下方。
19.本发明另提供一种配电站房智能除湿机器人系统的使用方法,包括以下步骤:s1、安装湿度采集终端5,在配电站房内根据需要安装至少一个湿度采集终端5;
s2、生成导航地图,启动激光扫描雷达42,清除配电站房待扫区域中经常移动的物体,并在扫描平面处贴上不影响雷达正常扫描的材料,选择配电站房没人或者人较少的时间点进行扫图,在地图管理模块62中初次建图后,在机器人可能的行走路径上,扫描周围360度的区域,获得激光匹配的参照点构建完整的地图;可以先让机器人先去完成建图闭环,再去详细扫描环境里的各个小细节;s3、联网测试,所述湿度采集终端5与机器人系统的联网测试,根据信号的强弱与深度摄像头41的测量数据在地图中标记出湿度采集终端5的位置;s4、路径规划,若所述中央控制处理中心61接到湿度采集终端5采集的湿度值超过阀值,所述地图管理模块62根据湿度采集终端5的位置规划行走的路径,同时运动导航控制系统65根据路径计算行走距离,并把数据发送给伺服舵轮3,所述伺服舵轮3按照规划路径转动,驱动承载底座2移动,使除湿箱体1随承载底座2移动,在移动过程中,所述辅助传感器67、深度摄像头41将实时的采集数据发送给中央控制处理中心61进行计算,判断在移动过程中发生碰撞的路径,从而发生修正指令;利用多种传感器信息融合,实现更加智能、实用的自主运动;s5、除湿处理,当到达数据达到阀值的湿度采集终端5附近时,启动除湿箱体1内的除湿装置,使湿气从进风口11进入到除湿装置中,并将除湿后的空气从排气口排出,除湿完成后,除湿机器人回归到初始位置,也就是地图零点位置,并把此作业过程通过机器无线通讯模块发63送给配电站房服务器。
20.该配电站房智能除湿机器人系统及其方法,通过传感器的信号汇聚模块66、运动导航控制系统65及传感器装置,以即时定位与地图构建为基础,通过装置自身传感器绘制配电房地图,准确的知道自身当前位置和湿度采集终端5检测区域,实现除湿路线精确导航和完整覆盖,实际应用中配合布置在配电站房不同位置的湿度采集终端5的信号,自动判断相应区域是否需要进行除湿控制,计算路线并自行前往,完成除湿动作后回归原位,真正实现除湿机在新型智慧站房里的智能和有效应用。
21.最后应说明的是:以上所述仅为本发明的优选实施例而已,并不用于限制本发明,尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。