技术特征:
1.一种配电站房智能除湿机器人系统,其特征在于:包括内部设置有除湿装置的除湿箱体(1)、用于获取扫描环境的轮廓信息的激光扫描雷达(42)、用于使所述除湿箱体(1)移动的伺服舵轮(3)、根据激光扫描雷达(42)采集轮廓信息建立导航地图的地图管理模块(62)、通过地图管理模块(62)的数据规划行走路径发送给执行指令给伺服舵轮(3)的运动导航控制系统(65);所述地图管理模块(62)设置有深度学习和视觉即时定位与地图构建系统;所述地图管理模块(62)、运动导航控制系统(65)均与中央控制处理中心(61)相连接,所述中央控制处理中心(61)接收机器无线通讯模块(63)的湿度采集数据,并把温度采集数据处理后将执行命令发送给运动导航控制系统(65);所述机器无线通讯模块(63)接收湿度采集终端(5)的采集湿度信号,所述湿度采集终端(5)包括用于感知环境中湿度信号的湿度传感器(51)、对所述湿度传感器(51)的湿度信号进行数模转换并处理的湿度微处理器(52)、与所述湿度微处理器(52)相连接并把湿度数据发送给所述中央控制处理中心(61)的湿度无线通讯模块(53)。2.根据权利要求1所述的一种配电站房智能除湿机器人系统,其特征在于:所述除湿箱体(1)上设置有可调节采集平台(4),所述可调节采集平台(4)设置有用于探测物体距离的深度摄像头(41)以及所述激光扫描雷达(42),所述深度摄像头(41)设置有四个,并呈同一水平面分布。3.根据权利要求1所述的一种配电站房智能除湿机器人系统,其特征在于:所述伺服舵轮(3)设置有四个,并分别安装于承载底座(2)下端面,所述承载底座(2)的上端面与除湿箱体(1)的相连接,且所述承载底座(2)的侧面设置有若干超声波传感器(21),所述超声波传感器(21)用于在承载底座(2)移动时通过发送和接收超声波判断物体与承载底座(2)的距离。4.根据权利要求3所述的一种配电站房智能除湿机器人系统,其特征在于:所述伺服舵轮(3)包括与运动导航控制系统(65)相连接并执行其发出指令的伺服舵轮控制器(32)、与伺服舵轮控制器(32)相连接的转向电机和驱动电机、与驱动电机转动连接的车轮(31),所述伺服舵轮(3)内设置有用于计量距离的行走编码器。5.根据权利要求4所述的一种配电站房智能除湿机器人系统,其特征在于:四个所述车轮(31)上均设置有用于行车防滑的纹路,其中,两个所述车轮(31)的纹路呈“八”字型分布。6.根据权利要求1所述的一种配电站房智能除湿机器人系统,其特征在于:所述激光扫描雷达(42)和深度摄像头(41)均与信号汇聚模块(66)相连接,所述信号汇聚模块(66)与中央控制处理中心(61)相连接,并将采集到的数据发送给中央控制处理中心(61)进行数据分析和处理,所述信号汇聚模块(66)还与辅助传感器(67)相连接,所述辅助传感器(67)包括所述超声波传感器(21)、防跌落传感器(671)、碰撞传感器(672)。7.根据权利要求3所述的一种配电站房智能除湿机器人系统,其特征在于:所述超声波传感器(21)设置有若干,并同一直线分布安装于承载底座(2)的侧面,所述防跌落传感器(671)安装于承载底座(2)的侧面的下方,与承载底座(2)的下端面齐平,所述承载底座(2)侧面安装有若干所述碰撞传感器(672),所述碰撞传感器(672)突出于承载底座(2)表面,并分布于相邻两个超声波传感器(21)之间,所述碰撞传感器(672)的安装在承载底座(2)高度的4/5处。
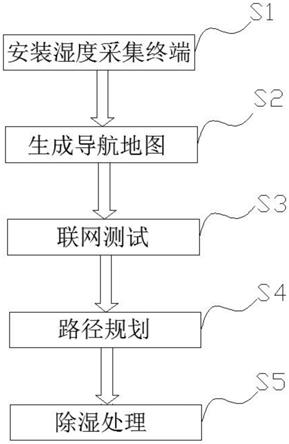
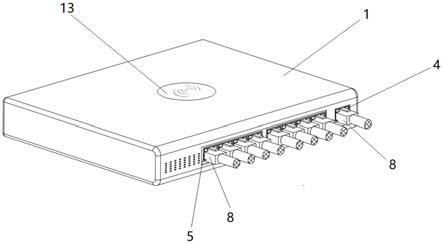
8.根据权利要求2所述的一种配电站房智能除湿机器人系统,其特征在于:所述可调节采集平台(4)与除湿箱体(1)以及承载底座(2)呈同轴分布,且所述可调节采集平台(4)的上端面中心点安装激光扫描雷达(42),所述激光扫描雷达(42)安装与可调节采集平台(4)的上端面的形成的倾角不超过2度,所述可调节采集平台(4)的上端面设置有弧形的圆角,且弧形面未落入所述激光扫描雷达(42)的扫描角度内。9.根据权利要求1所述的一种配电站房智能除湿机器人系统,其特征在于:所述中央控制处理中心(61)还与除湿控制模块(64)相连接,所述除湿控制模块(64)与设置在除湿箱体(1)内的除湿装置相连接,所述除湿装置的进风管道与设置在除湿箱体(1)的进风口(11)相连接,所述除湿装置的出风管道与设置在除湿箱体(1)的出风口相连接,所述进风口(11)分布设置于除湿箱体(1)的中间位置,所述除湿箱体(1)上设置有散热孔(12)。10.根据权利要求9所述的一种配电站房智能除湿机器人系统的使用方法,其特征在于:包括以下步骤:s1、安装湿度采集终端(5),在配电站房内根据需要安装至少一个湿度采集终端(5);s2、生成导航地图,启动激光扫描雷达(42),清除配电站房待扫区域中经常移动的物体,并在扫描平面处贴上不影响雷达正常扫描的材料,选择配电站房没人或者人较少的时间点进行扫图,在地图管理模块(62)中初次建图后,在机器人可能的行走路径上,扫描周围360度的区域,获得激光匹配的参照点构建完整的地图;s3、联网测试,所述湿度采集终端(5)与机器人系统的联网测试,根据信号的强弱与深度摄像头(41)的测量数据在地图中标记出湿度采集终端(5)的位置;s4、路径规划,若所述中央控制处理中心(61)接到湿度采集终端(5)采集的湿度值超过阀值,所述地图管理模块(62)根据湿度采集终端(5)的位置规划行走的路径,同时运动导航控制系统(65)根据路径计算行走距离,并把数据发送给伺服舵轮(3),所述伺服舵轮(3)按照规划路径转动,驱动承载底座(2)移动,使除湿箱体(1)随承载底座(2)移动,在移动过程中,所述辅助传感器(67)、深度摄像头(41)将实时的采集数据发送给中央控制处理中心(61)进行计算,判断在移动过程中发生碰撞的路径,从而发生修正指令;s5、除湿处理,当到达数据达到阀值的湿度采集终端(5)附近时,启动除湿箱体(1)内的除湿装置,使湿气从进风口(11)吸入到除湿装置中,并将除湿后的空气从排气口排出,除湿完成后,除湿机器人回归到初始位置,并把此作业过程通过机器无线通讯模块发(63)送给配电站房服务器。
技术总结
本发明公开了一种配电站房智能除湿机器人系统及其方法,属于配电站房除湿技术领域,包括内部设置有除湿装置的除湿箱体、用于获取扫描环境的轮廓信息的激光扫描雷达、用于使所述除湿箱体移动的伺服舵轮、根据激光扫描雷达采集轮廓信息建立导航地图的地图管理模块、通过地图管理模块的数据规划行走路径发送给执行指令给伺服舵轮的运动导航控制系统;该配电站房智能除湿机器人系统及其方法,通过传感器信号汇聚、运动导航控制系统及传感器装置,实现除湿路线精确导航和完整覆盖,配合布置在配电站房不同位置的湿度传感器的信号,自动判断相应区域是否需要进行除湿控制,完成除湿动作后回归原位,真正实现除湿机在新型智慧站房里的智能和有效应用。的智能和有效应用。的智能和有效应用。
技术研发人员:费章君 杨仕友 任广振 万尚军 安欣睿 操星
受保护的技术使用者:南京征途信息技术有限公司
技术研发日:2021.08.20
技术公布日:2021/11/21
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。