1.本发明涉及医疗康复器械技术领域,更具体地说是涉及一种多位姿膝关节康复训练机器人。
背景技术:
2.膝关节是人体中承担支承和运动功能的重要关节。如果膝关节在发生损伤或医疗手术后的康复期内不能及时得到有效的锻炼,则极易造成膝关节部位的粘连和肌肉萎缩,从而大大限制膝关节的运动能力,严重的甚至会造成关节部分功能的永久缺损。因此,现代康复医学认为,术后及时对膝关节进行适度、有效的康复锻炼,对恢复膝关节功能具有非常重要的作用。
3.目前,大多数膝关节康复训练需要医护人员来与患者相配合才能完成,一方面加剧了医院的人力紧张,另一方面也加剧了患者的经济负担。虽然,已出现一些膝关节康复训练装置用于辅助训练,可以一定程度减轻医护人员紧张及患者经济负担等问题,但仍存在训练姿势和方法单一,训练效果差等问题。
4.因此,如何提供一种训练姿势及方法多样,训练效果良好的多位姿膝关节康复训练机器人是本领域亟需解决的技术问题之一。
技术实现要素:
5.有鉴于此,本发明提供了一种多位姿膝关节康复训练机器人,目的就是为了解决上述之不足。
6.为解决上述技术问题,本发明采取了如下技术方案:
7.一种多位姿膝关节康复训练机器人,包括:
8.床体;所述床体的一端设置有可枢转的靠背;所述靠背的下部设置有用于驱动所述靠背转动的第一驱动装置;
9.两个膝关节训练机构;每个所述膝关节训练机构均包括大腿固定支撑板、小腿支撑板、用于驱动所述大腿固定支撑板转动的第二驱动装置、用于驱动所述小腿支撑板转动的第三驱动装置、连接件和滑动组件;所述大腿固定支撑板的一端铰接于所述床体上靠近所述靠背的位置,且其另一端铰接于所述小腿支撑板的一端;所述小腿支撑板的另一端通过可拆卸的连接件可转动地连接于所述滑动组件的中部;所述滑动组件的两端可滑动地连接于所述床体上;所述第二驱动装置设置于所述大腿固定支撑板的外侧;所述第三驱动装置设置于所述床体的下方。
10.此技术方案的有益效果是:首先,通过第一驱动装置驱动靠背转动,可以使患者在坐式和卧式两种训练方式之间自由切换选用,以满足不同的膝关节康复训练需求,其次,通过第二驱动装置驱动大腿固定支撑板转动,可以带动小腿支撑的前端板绕大腿支撑板后端铰接处转动,小腿支撑板的后端通过滑动组件沿床体往复直线滑动,进行弯腿屈膝康复训练,然后,还可以将小腿支撑板与连接件拆开,并将第三驱动装置的输出端与小腿支撑板连
接,同时将大腿支撑板恢复水平状态,通过第三驱动装置驱动小腿支撑板转动,进行小腿抬升康复训练,整个康复训练机器人能够以坐、卧两种状态分别进行弯腿屈膝及小腿抬升两种康复训练,能够最大限度的满足患者的康复训练需求,适应性强,康复训练效果好。
11.优选地,所述第一驱动装置包括第一驱动电机、第一滚珠丝杠、第一滑台和第一驱动杆;所述第一驱动电机的输出端与所述第一滚珠丝杠相连接;所述第一滚珠丝杠的螺母与所述第一滑台的底端相连接;所述第一驱动杆的一端与所述第一滑台铰接,且其另一端铰接于所述靠背的底端。
12.优选地,所述床体的左右两侧均铰接有一阻尼器;每个所述阻尼器的另一端均铰接于所述靠背的底端。
13.此技术方案的有益效果是:当靠背处于升起状态时,能够辅助支撑患者上半身重量,减轻第一驱动装置承受压力,延长使用寿命。
14.优选地,所述靠背的顶端可滑动地设置有头枕和背枕。
15.优选地,所述大腿固定支撑板和小腿支撑板之间还设置有大腿滑动支撑板;所述大腿滑动支撑板的一端可滑动地连接于所述大腿固定支撑板的一端,且其另一端铰接于所述小腿支撑板的一端。
16.优选地,所述小腿支撑板上可滑动地设置有脚部支撑板。
17.上述技术方案的有益效果是:通过调节头枕、背枕、大腿滑动支撑板以及脚部支撑板的位置,能够适应不同患者的使用需求,极大地提高患者舒适度。
18.优选地,所述第二驱动装置包括第二驱动电机、第二滚珠丝杠、第二滑台和第二驱动杆;所述第二驱动电机的输出端与所述第二滚珠丝杠相连接;所述第二滚珠丝杠的螺母与所述第二滑台的底端相连接;所述第二驱动杆的一端与所述第二滑台铰接,且其另一端铰接于所述大腿固定支撑板的外侧。
19.优选地,所述滑动组件包括转轴、设置于所述转轴两端的两个滑轮和设置于所述床体上的两条第三滑轨;所述连接件的一端可转动地连接于所述转轴的中部;两个所述滑轮对应设置于两条所述第三滑轨内。
20.优选地,所述床体的下部设置有固定板;所述第三驱动装置的一端铰接于所述固定板上,且其另一端可拆卸地铰接于所述小腿支撑板的底端。
21.优选地,所述第三驱动装置为电动伸缩杆。
22.本发明相对于现有技术取得了以下技术效果:
23.(1)首先,通过第一驱动装置驱动靠背转动,可以使患者在坐式和卧式两种训练方式之间自由切换选用,以满足不同的膝关节康复训练需求,其次,通过第二驱动装置驱动大腿固定支撑板转动,可以带动小腿支撑的前端板绕大腿支撑板后端铰接处转动,小腿支撑板的后端通过滑动组件沿床体往复直线滑动,进行弯腿屈膝康复训练,然后,还可以将小腿支撑板与连接件拆开,并将第三驱动装置的输出端与小腿支撑板连接,同时将大腿支撑板恢复水平状态,通过第三驱动装置驱动小腿支撑板转动,进行小腿抬升康复训练,整个康复训练机器人能够以坐、卧两种姿势分别进行弯腿屈膝及小腿抬升两种康复训练,能够最大限度的满足患者的膝关节康复训练需求,适应性强,膝关节康复训练效果好。
24.(2)通过调节头枕、背枕、大腿滑动支撑板以及脚部支撑板的位置,能够适应不同患者的使用需求,极大地提高患者舒适度。
附图说明
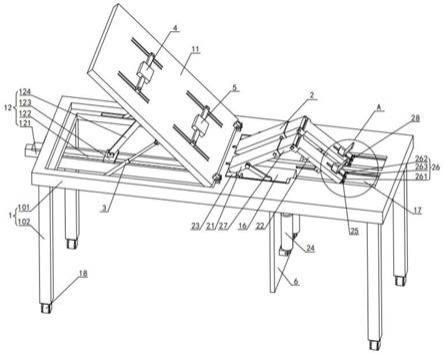
25.图1为本发明进行弯腿屈膝康复训练时的轴测图;
26.图2为本发明进行弯腿屈膝康复训练时的俯视图;
27.图3为本发明进行弯腿屈膝康复训练时的右视图;
28.图4为本发明靠背驱动装置部分的结构示意图;
29.图5为图1中a部分的局部放大图;
30.图6为本发明进行小腿抬升康复训练的轴测图;
31.图7为本发明进行小腿抬升康复训练的主视图;
32.图8为图6中b部分的局部放大图;
33.图9为图6中c部分的局部放大图;
34.图中:1、床体;101、床板;102、床腿;11、靠背;12、第一驱动装置;121、第一驱动电机;122、第一滚珠丝杠;123、第一滑台;124、第一驱动杆;13、靠背放置槽;131、阻尼器容纳槽;14、第一滑轨;15、第二滑轨;16、大腿放置槽;17、小腿放置槽;18、滚轮;2、膝关节训练机构;21、大腿固定支撑板;22、小腿支撑板;23、第二驱动装置;231、第二驱动电机;232、第二滚珠丝杠;233、第二滑台;234、第二驱动杆;24、第三驱动装置;25、连接件;26、滑动组件;261、转轴;262、滑轮;263、第三滑轨;27、大腿滑动支撑板;28、脚部支撑板;3、阻尼器;4、头枕;41、头枕本体;42、第一滑块;5、背枕;51、背枕本体;52、第二滑块;6、固定板;61、固定座。
具体实施方式
35.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
36.实施例
37.参照图1所示,本发明公开了一种多位姿膝关节康复训练机器人,包括:
38.床体1;床体1的一端设置有可枢转的靠背11;所述靠背11的下部设置有用于驱动所述靠背11转动的第一驱动装置12;
39.2个膝关节训练机构2;每个膝关节训练机构2均包括大腿固定支撑板21、小腿支撑板22、用于驱动大腿固定支撑板21转动的第二驱动装置23、用于驱动小腿支撑板22转动的第三驱动装置24、连接件25和滑动组件26;大腿固定支撑板21的一端铰接于床体1上靠近靠背11的位置,且其另一端铰接于小腿支撑板22的一端;小腿支撑板22的另一端通过可拆卸的连接件25可转动地连接于滑动组件26的中部;滑动组件26的两端可滑动地连接于床体1上;第二驱动装置23设置于大腿固定支撑板21的外侧;第三驱动装置24设置于床体1的下方。
40.床体1包括床板101和均布于床板101底端的4个床腿102;靠背11铰接于于床板101的一端;相应的,床板101上设置有与靠背11相适配的靠背放置槽13;第一驱动装置12固定连接于所述床板101的底端。
41.第一驱动装置12包括第一驱动电机121、第一滚珠丝杠122、第一滑台123和第一驱动杆124;第一驱动电机121的输出端与第一滚珠丝杠122相连接;第一滚珠丝杠122的螺母
与第一滑台123的底端相连接;第一驱动杆124的一端与第一滑台123铰接,且其另一端铰接于靠背11的底端。
42.靠背放置槽13的左右两侧均设置有一阻尼器容纳槽131;每个所述阻尼器容纳槽131内均铰接有一阻尼器3;每个阻尼器3另一端均铰接于靠背11的底端。
43.靠背11的顶端可滑动地设置有头枕4和背枕5。
44.头枕4包括头枕本体41和设置于头枕本体41左右两侧的第一滑块42;相应地,床板101上设置有与第一滑块42相适配的第一滑轨14,用于调节头枕本体41在床板101上的相对位置,以此适应不同患者的使用需求,增强患者的舒适。
45.背枕5包括背枕本体51和设置于背枕本体51左右两侧的第二滑块52;相应地,床板101上设置有与第二滑块52相适配的第二滑轨15,用于调节背枕本体51在床板101上的相对位置,以此适应不同患者的使用需求,增强患者的舒适。
46.床板101上还设置用于放置大腿固定支撑板21的大腿放置槽16和用于放置小腿支撑板22的小腿放置槽17;大腿固定支撑板21的一端铰接于大腿放置槽16靠近靠背11的一端;大腿固定支撑板21的底端与大腿放置槽16的槽底表面平行接触,对大腿固定支撑板21起到支撑作用;第二驱动装置设置于大腿放置槽16的外侧;小腿放置槽17贯穿床板101,便于小腿支撑板22转动。
47.第二驱动装置23包括第二驱动电机231、第二滚珠丝杠232、第二滑台233和第二驱动杆234;第二驱动电机231的输出端与第二滚珠丝杠232相连接;第二滚珠丝杠232的螺母与第二滑台233的底端相连接;第二驱动杆234的一端与第二滑台233铰接,且其另一端铰接于大腿固定支撑板21的外侧。
48.大腿固定支撑板21和小腿支撑板22之间还设置有大腿滑动支撑板27;大腿滑动支撑板27的一端可滑动地连接于大腿固定支撑板21的一端,且其另一端铰接于小腿支撑板22的一端。
49.大腿滑动支撑板27与小腿支撑板22铰接的一端位于小腿放置槽17内,防止小腿支撑板22向下转动时与大腿放置槽16的底部干涉。
50.滑动组件26包括转轴261、设置于转轴261两端的2个滑轮262和2条第三滑轨263;连接件25的一端可转动地连接于转轴261的中部;2条第三滑轨263设置于小腿放置槽17的左右两侧壁上;2个滑轮262对应设置于2条第三滑轨263内。
51.小腿支撑板22上可滑动地设置有脚部支撑板28。
52.床板101的底端靠近小腿放置槽17处设置有固定板6;第三驱动装置24的一端铰接于固定板6的下端,且其另一端可拆卸地铰接于小腿支撑板22的底端。
53.在本实施例中,固定板6的上端还设置有2个固定座61;当第三驱动装置处于闲置状态时,固定座61通过插销可拆卸地将对应的第三驱动装置24固定于固定板6的表面,避免第三驱动装置24晃动。
54.在本实施例中,第三驱动装置24为电动伸缩杆。
55.在本实施例中,每个床腿102的底端均设置有滚轮18。
56.训练方法:
57.(1)坐式和卧式两种训练姿势:首先,通过调整头枕本体41、背枕本体51、大腿滑动支撑板27以及脚部支撑板28的位置,使不同患者处于最舒适的训练状态,其次,当第一驱动
装置12处于初始状态时,患者可平躺在床板101上进行训康复练,然后,通过启动第一驱动电机121带动第一滑台123移动,从而带动第一驱动杆124驱使靠背11转动,使患者坐于床板101上进行康复训练。
58.(2)弯腿屈膝康复训练:首先,通过螺栓将连接件25与小腿支撑板22固定连接在一起,同时将第三驱动装置24的输出端通过插销固定于固定座61上,然后第二驱动电机231通过第二滚珠丝杠232驱动第二滑台233往复移动,从而带动第二驱动杆234驱动大腿固定支撑板21往复摆动,进而带动小腿支撑板22绕与大腿滑动支撑板27铰接处转动,同时,滑轮262在小腿支撑板22的带动下沿第三滑轨263进行往复运动,以此完成弯腿屈膝康复训练。
59.(3)小腿抬升康复训练:首先,通过第二驱动装置23将大腿固定支撑板21和小腿支撑板22恢复到初始状态,其次,将连接件25从小腿支撑板22上拆下,使小腿支撑板22处于自由下垂状态,然后,将第三驱动装置24的输出端铰接于小腿支撑板22的底端,最后,启动第三驱动装置24驱使小腿支撑板22绕大腿滑动支撑板27铰接处进行往复旋转运动,以此完成小腿抬升康复训练。
60.本发明能够以坐、卧两种姿势分别进行弯腿屈膝及小腿抬升两种康复训练,膝关节康复训练模式更加全面,能够最大限度的满足患者的康复训练需求,适应性强,康复训练效果好。
61.以上所述,仅是本发明较佳实施例而已,并非对本发明的技术范围作任何限制,故凡是依据本发明的技术实质对以上实施例所作的任何细微修改、等同变化与修饰,均仍属于本发明技术方案的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。