1.本实用新型涉及搬运机技术领域,具体为自动化机械抓手搬运机。
背景技术:
2.物料搬运机械的应用在生产中有着重要的意义,这主要因为物料搬运的量十分巨大,在人力搬运不能承担的重物和在高温或有放射性物质的区域作业时,必须利用机械进行搬运,因此,在生产中应对物料搬运系统给予足够的重视,并尽量采用先进适用的物料搬运机械,现有的技术中,现有的装置结构单一,自动化程度较低,工作人员不便于远程操控,且在抓取物料时,不便观察抓取时的压力情况,有的物料压力过大会容易造成损坏,不便操作。
技术实现要素:
3.本部分的目的在于概述本实用新型的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和实用新型名称中可能会做些简化或省略以避免使本部分、说明书摘要和实用新型名称的目的模糊,而这种简化或省略不能用于限制本实用新型的范围。
4.鉴于上述和/或现有搬运机中存在的问题,提出了本实用新型。
5.因此,本实用新型的目的是提供自动化机械抓手搬运机,能够便于对物料进行搬运,防止人员搬运影响搬运效率,自动化程度较高,便于工作人员远程操控,提高了搬运效率,便于在抓取物料时,远程观察抓取时的压力情况,防止有的物料压力过大造成的损坏,方便操作。
6.为解决上述技术问题,根据本实用新型的一个方面,本实用新型提供了如下技术方案:
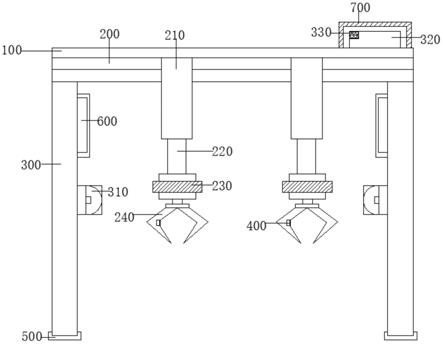
7.自动化机械抓手搬运机,包括机架、直线电机、支撑架和压力传感器,所述直线电机固定安装在机架内腔的底部,所述直线电机的输出端固定安装有液压缸,所述液压缸的输出端固定安装有推杆,所述推杆的底部固定安装有驱动电机,所述驱动电机的输出端固定安装有机械抓手,所述支撑架固定安装在机架的底部,所述支撑架的侧壁固定安装有摄像头,所述机架的顶部固定安装有控制器,所述控制器内腔的顶部嵌入安装有无线通讯模块,所述压力传感器嵌入安装在机械抓手内腔的侧壁。
8.作为本实用新型所述的自动化机械抓手搬运机的一种优选方案,其中:所述支撑架的底部固定安装有防滑垫,所述防滑垫与支撑架的底部胶接。
9.作为本实用新型所述的自动化机械抓手搬运机的一种优选方案,其中:所述支撑架的侧壁固定安装有照明灯,所述照明灯与支撑架的侧壁通过螺栓螺纹连接。
10.作为本实用新型所述的自动化机械抓手搬运机的一种优选方案,其中:所述控制器的侧壁设置有散热外壳,所述散热外壳与控制器的侧壁通过螺栓螺纹连接。
11.作为本实用新型所述的自动化机械抓手搬运机的一种优选方案,其中:所述摄像
头和压力传感器与控制器的输入端通过连接线连接,所述直线电机、液压缸和驱动电机与控制器的输出端通过连接线连接,所述无线通讯模块与控制器的输入端和输出端通过连接线连接。
12.与现有技术相比:现有的技术中,现有的装置结构单一,自动化程度较低,工作人员不便于远程操控,且在抓取物料时,不便观察抓取时的压力情况,有的物料压力过大会容易造成损坏,不便操作,本技术文件中,能够便于对物料进行搬运,防止人员搬运影响搬运效率,自动化程度较高,便于工作人员远程操控,提高了搬运效率,便于在抓取物料时,远程观察抓取时的压力情况,防止有的物料压力过大造成的损坏,方便操作。
附图说明
13.为了更清楚地说明本实用新型实施方式的技术方案,下面将结合附图和详细实施方式对本实用新型进行详细说明,显而易见地,下面描述中的附图仅仅是本实用新型的一些实施方式,对于本领域普通技术人员来讲,在不付出创造性劳动性的前提下,还可以根据这些附图获得其它的附图。其中:
14.图1为本实用新型自动化机械抓手搬运机的结构示意图;
15.图2为本实用新型自动化机械抓手搬运机的压力传感器示意图。
16.图中:100机架、200直线电机、210液压缸、220推杆、230驱动电机、240机械抓手、300支撑架、310摄像头、320控制器、330无线通讯模块、400压力传感器、500防滑垫、600照明灯、700散热外壳。
具体实施方式
17.为使本实用新型的上述目的、特征和优点能够更加明显易懂,下面结合附图对本实用新型的具体实施方式做详细的说明。
18.在下面的描述中阐述了很多具体细节以便于充分理解本实用新型,但是本实用新型还可以采用其他不同于在此描述的其它方式来实施,本领域技术人员可以在不违背本实用新型内涵的情况下做类似推广,因此本实用新型不受下面公开的具体实施方式的限制。
19.其次,本实用新型结合示意图进行详细描述,在详述本实用新型实施方式时,为便于说明,表示器件结构的剖面图会不依一般比例作局部放大,而且所述示意图只是示例,其在此不应限制本实用新型保护的范围。此外,在实际制作中应包含长度、宽度及深度的三维空间尺寸。
20.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的实施方式作进一步地详细描述。
21.本实用新型提供自动化机械抓手搬运机,请参阅图1
‑
图2,包括机架100、直线电机200、支撑架300和压力传感器400,直线电机200固定安装在机架 100内腔的底部,直线电机200的输出端固定安装有液压缸210,液压缸210的输出端固定安装有推杆220,推杆220的底部固定安装有驱动电机230,驱动电机230的输出端固定安装有机械抓手240,支撑架300固定安装在机架100的底部,支撑架300的侧壁固定安装有摄像头310,机架100的顶部固定安装有控制器320,控制器320内腔的顶部嵌入安装有无线通讯模块330,压力传感器 400嵌入安装在机械抓手240内腔的侧壁,具体的,直线电机200通过螺栓螺纹安装在机架100内腔的
底部,直线电机200的输出端通过螺栓螺纹安装有液压缸210,液压缸210的输出端嵌入安装有推杆220,推杆220的底部通过螺栓螺纹安装有驱动电机230,驱动电机230的输出端通过螺栓螺纹安装有机械抓手240,支撑架300通过螺栓螺纹安装在机架100的底部,支撑架300的侧壁通过螺栓螺纹安装有摄像头310,机架100的顶部通过螺栓螺纹安装有控制器 320,控制器320内腔的顶部通过螺栓螺纹安装有无线通讯模块330,压力传感器400通过螺栓螺纹安装在机械抓手240内腔的侧壁,机架100用于放置装置,直线电机200用于调节机械抓手240的位置进行运输,液压缸210用于推动推杆220,推杆220用于调节机械抓手240的高度,驱动电机230用于操作机械抓手240,机械抓手240用于抓取物料,便于对物料进行搬运,防止人员搬运影响搬运效率,自动化程度较高,支撑架300用于固定装置,摄像头310用于采集图像信息,通过控制器320传达到无线通讯模块330,无线通讯模块330传达到远程终端,工作人员在远程终端观察方便操控装置,便于工作人员远程操控,提高了搬运效率,压力传感器400用于检测机械抓手240抓取时的压力值,通过控制器320传达到无线通讯模块330,无线通讯模块330传达到无线终端,工作人员在远程终端观察,便于在抓取物料时,远程观察抓取时的压力情况,防止有的物料压力过大造成的损坏,方便操作。
22.请参阅图1,支撑架300的底部固定安装有防滑垫500,防滑垫500与支撑架300的底部胶接,具体的,防滑垫500用于增大平面的摩擦力,提高了装置的稳定性。
23.请再次参阅图1,支撑架300的侧壁固定安装有照明灯600,照明灯600与支撑架300的侧壁通过螺栓螺纹连接,具体的,照明灯600用于提供亮度,便于观察。
24.请再次参阅图1,控制器320的侧壁设置有散热外壳700,散热外壳700与控制器320的侧壁通过螺栓螺纹连接,具体的,散热外壳700用于帮助控制器 320散热,提高了装置的散热效果。
25.请参阅图1和图2,摄像头310和压力传感器400与控制器320的输入端通过连接线连接,直线电机200、液压缸210和驱动电机230与控制器320的输出端通过连接线连接,无线通讯模块330与控制器320的输入端和输出端通过连接线连接,具体的,摄像头310和压力传感器400与控制器320的输入端连接,直线电机200、液压缸210和驱动电机230与控制器320的输出端连接,无线通讯模块330与控制器320的输入端和输出端连接,提高了装置的稳定性。
26.在具体使用过程中,使用直线电机200调节机械抓手240的位置进行运输,使用液压缸210推动推杆220,通过推杆220调节机械抓手240的高度,使用驱动电机230操作机械抓手240,使用机械抓手240抓取物料,使用摄像头310采集图像信息,通过控制器320传达到无线通讯模块330,无线通讯模块330传达到远程终端,工作人员在远程终端观察进行操控装置,使用压力传感器400 检测机械抓手240抓取时的压力值,通过控制器320传达到无线通讯模块 330,无线通讯模块330传达到无线终端,工作人员在远程终端观察,根据需求操控装置。
27.虽然在上文中已经参考实施方式对本实用新型进行了描述,然而在不脱离本实用新型的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件。尤其是,只要不存在结构冲突,本实用新型所披露的实施方式中的各项特征均可通过任意方式相互结合起来使用,在本说明书中未对这些组合的情况进行穷举性的描述仅仅是出于省略篇幅和节约资源的考虑。因此,本实用新型并不局限于文中公开的特定实施方式,而是包括落入
权利要求的范围内的所有技术方案。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。