1.本发明属于光学设计技术领域,涉及一种离轴两反多光合一光学主系统。
背景技术:
2.目前,我国机载吊舱多探测距离和分辨率仅满足低空或中低空使用。要满足高空、超远距离全天时探测,光学载荷必须加大焦距和口径,同时增加探测波段,高分辨可见用于白天精细观察与识别;红外中波和长波用于夜晚不同观测环境的远距离探测与识别;激光用于距离确定,为系统增加距离维度的探测信息。在航空吊舱中光学载荷的体积和重量尤为重要,多种长焦距、大口径光学载荷分立布置,很难实现空间的有效合理布置,导致各系统间相互制约,无法达到最优的系统性能。
3.为了解决各机载吊舱光学系统各谱段载荷无法实现最大化设计的矛盾,越来越多的系统采用主系统反射式共口径,后组独立分光成像的体制进行系统规划,很好的解决了系统各谱段成像制约的难题。但大多主系统采用了rc同轴折反射式光学结构形式,虽然能够保证系统各波段同时经过主系统后分别成像,降低了系统体量大的矛盾问题,但系统中存在的次镜遮拦,大大降低了系统的有效通光口径和成像性能;而无中心遮拦的离轴三反光学系统结构形式,在光学性能上最优,但是其先天的缺陷就是体量大,在y方向的离轴布置的主镜和三镜导致系统体积过大,很难适应机载吊舱环境的应用。
技术实现要素:
4.本发明要解决的技术问题是提供一种离轴两反多光合一光学主系统,该系统能够对入射光线进行有效的缩束,实现机载环境无中心遮拦,大口径全谱段的成像探测,并且且体量小。
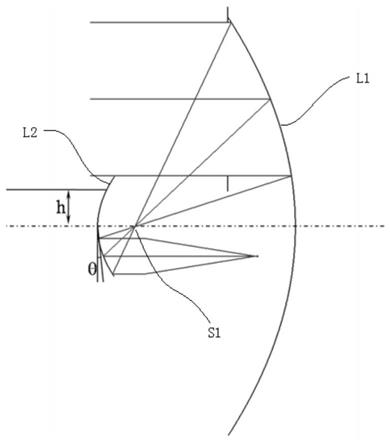
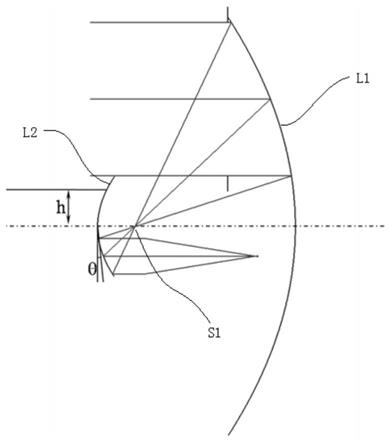
5.为了解决上述技术问题,本发明的离轴两反多光合一光学主系统包括离轴主镜l1和离轴次镜l2;所述的离轴主镜l1和离轴次镜l2均为正光焦度反射镜,且反射面均为旋转对称偶次非球面;离轴主镜l1将入射的平行光线汇聚在自身的焦点处,该焦点处设置一次像面视场光阑s1;离轴次镜l2焦点与离轴主镜l1焦点重合,经过焦点的光线通过离轴次镜l2反射后出射平行光线。
6.所述离轴主镜l1和离轴次镜l2的反射面均为抛物面。
7.所述离轴主镜l1的曲率半径为
‑
295mm~
‑
275mm;离轴次镜l2的曲率半径为60mm~70mm;离轴主镜与离轴次镜的顶点沿光轴负方向的距离为
‑
172mm~
‑
176mm。
8.所述离轴次镜l2的x向alpha旋转角度为
‑
0.1
°
~
‑
0.5
°
,y向偏心量为0.1~0.5mm。
9.所述离轴主镜l1的反射面采用高次非球面,离轴次镜l2的反射面为抛物面。
10.所述离轴主镜l1的曲率半径为
‑
295mm~
‑
275mm;离轴次镜l2的曲率半径为60mm~70mm;离轴主镜与离轴次镜的顶点沿光轴负方向的距离为
‑
172mm~
‑
176mm。
11.所述离轴主镜l1的反射面面型参数为k=
‑
1.05~
‑
0.57,a=0,b=1e
‑
17~9e
‑
17,c=1e
‑
22~9e
‑
22,d=1e
‑
26~9e
‑
26。
12.所述离轴主镜l1的反射面为抛物面,离轴次镜l2的反射面为双曲面。
13.所述离轴主镜l1的曲率半径为
‑
295mm~
‑
275mm;离轴次镜l2的曲率半径为60mm~70mm;离轴主镜与离轴次镜的顶点沿光轴负方向的距离为
‑
172mm~
‑
176mm。
14.所述离轴次镜l2的面型参数为k=
‑
1.024~
‑
3.5。
15.本发明提出了一种适合机载光学载荷离轴两反主光学系统,其作用是将位于无穷远目标发出的能量进行准直缩束,用于后组各路波段探测系统分光成像。同时解决了目前机载光学载荷主系统存在中心遮拦和系统体量大的技术难题,系统采用全反射式光学方案,理论上可以实现全谱段成像探测,系统对于无限远目前进行有效缩束,用于后组分光,有效的抑制了各谱段分别成像的相互干扰,各系统均能实现最优像质,简化系统的结构形式,适合机载环境的大口径长焦距系统的应用。
16.本发明采用离轴两反射式光学结构形式,作为机载吊舱多光合一光学载荷主系统,对入射光线进行有效的缩束,进而进行分光各波段分别成像,可实现机载环境无中心遮拦,大口径全谱段的成像探测,兼顾系统大口径、小型化、轻量化的需求。
17.本发明的目的是解决机载环境,空间体积有限的情况下实现大口径、长焦距、多光谱成像的设计问题,系统较传统的同轴折反和离轴三反系统不存在中心遮拦,同时体量更为紧凑适合机载环境应用。本发明采用反射式结构形式,将多谱段成像口径进行显著压缩,不存在色差问题,同时解决了多谱段大口径和大体量的矛盾。本发明采用离轴光学结构形式,消除了同轴反射式主系统中心遮拦导致的有效口径下降和成像质量降低的情况。采用两反结构形式,明显降低了离轴三反结构体量大的问题。与现有技术相比,具有以下的优点和产生的积极效果如下:
18.1.本发明离轴两反多光合一光学主系统采用采用离轴两反结构形式,工作波段可以实现全谱段,放大倍率可以达到4倍以上;
19.2.本发明离轴两反多光合一光学主系统具有紧凑的结构形式,体积小巧、重量轻;
20.3.本发明离轴两反多光合一光学主系统所有元件均采用反射元件,无色差、无中心遮拦、畸变低等技术特点。
附图说明
21.图1是本发明的结构示意图。
22.图2是本发明实施例1的调制传递函数曲线。
具体实施方式
23.下面结合附图和实施例对本发明作进一步详细说明,可以理解的是,此处所描述的具体实施例仅仅用于解释本发明,而非对本发明的限定。另外还需说明的是,为了便于描述,附图中仅示出了与本发明相关的部分而非全部结构。
24.在本发明的描述中,除非另有明确的规定和限定,术语“相连”、“连接”、“固定”应做广义的理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接连接,也可以通过中间媒介间接连接,可以是两个元件内部的连通或两个元件的相互作用关系。对于本领域的普通技术人员而言,可以具体情况具体理解上述术语在本发明中的具体含义。
25.在本发明中,除非另有明确的规定和限定,第一特征在第二特征之“上”或之“下”可以包括第一和第二特征直接接触,也可以包括第一和第二特征不是直接接触而是通过它们之间的另外的特征接触。而且,第一特征在第二特征“之上”、“上方”和“上面”包括第一特征在第二特征正上方和斜上方,或者仅仅表示第一特征水平高度高于第二特征。第一特征在第二特征“之下”、“下方”、“下面”包括第一特征在第二特征正下方和斜下方,或仅仅表示第一特征水平高度小于第二特征。
26.在本实施例的描述中,术语“上”、“下”、“左”、“右”等方位或者位置关系为基于附图所示的方位或位置关系,仅是为了便于描述和简化操作,而不是指示或暗示所指的装置或元件必须具有特定的方位,以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”仅仅用于在描述上加以区分,并没有特殊的含义。
27.实施例1
28.如图1所示,本发明的离轴两反多光合一光学主系统包括离轴主镜l1和离轴次镜l2;所述的离轴主镜l1和离轴次镜l2均为正光焦度反射镜,反射面为旋转对称偶次非球面,其面型方程如下所示:
[0029][0030]
其中z为非球面的旋转对称轴,c为旋转对称偶次非球面的曲率半径,h为径向坐标,k为圆锥二次曲线系数。
[0031]
所述的离轴主镜l1作用是将无穷远目标成像到一次像面,离轴次镜l2作用是将离轴主镜l1所成的像缩束出射一定倍率的平行光线。
[0032]
离轴主镜l1将入射的平行光线汇聚在自身的焦点处,该焦点处设置一次像面视场光阑s1,一次像面视场光阑s1倾斜设置,可以遮挡超出系统成像视场的外部杂散辐射;离轴次镜l2焦点与离轴主镜l1焦点重合,经过焦点的光线通过离轴次镜l2反射后出射平行光线,用于后组分光分别成像。
[0033]
所述离轴主镜l1和离轴次镜l2的反射面均为抛物面,即k=
‑
1。
[0034]
所述离轴主镜l1的曲率半径为
‑
295mm~
‑
275mm;离轴次镜l2的曲率半径为60mm~70mm;离轴主镜与离轴次镜的顶点沿光轴负方向的距离为
‑
172mm~
‑
176mm。
[0035]
实施例2、3与实施例1的区别在于反射面参数不同,其他均相同。
[0036]
实施例1
‑
3的离轴主镜l1和离轴次镜l2反射面参数见表1。表中r为反射面的曲率半径,d为离轴主镜l1与离轴次镜l2的顶点沿光轴负方向的距离。
[0037]
表1
[0038][0039]
本实施例1
‑
3的技术指标见表2:
[0040]
表2
[0041][0042]
如图2所示为实施例1的各个波段波像差随视场的变化情况,整个视场的波像差小于0.029λ(λ=632nm)。
[0043]
如图2中横坐标为空间频率,单位是lp/mm,最大为733.7,纵坐标为归一化调制传递函数,从图2可以看出0视场子午方向(实线)和弧矢方向(点线)的调制传递函数、y方向1视场子午方向(虚线)和弧矢方向(星线)调制传递函数均接近衍射极限。离轴两反多光合一光学主系统各视场准直度见表3。
[0044]
表3
[0045][0046][0047]
表3中,第一列为对应探测视场,第二列为不同视场出射光线的发散角;表3中显示,出射光线准直度小于0.047mrad,能够满足后组不同波段接收成像使用。
[0048]
实施例4
[0049]
如图1所示,本实施例与实施例1的区别之处在于所述的离轴主镜l1的反射面采用高次非球面,高次非球面的面型参数为k:
‑
1.05~
‑
0.57;a:0;b:1e
‑
17~9e
‑
17;c:1e
‑
22~9e
‑
22;d:1e
‑
26~9e
‑
26,其目的是进一步增大离轴两反多光合一光学主系统成像视场,高次非球面对于轴外非对称的彗差与像散具有较强的校正能力,轴外像差随着系统视场的增大显著增加,加入高次非球面有利于主系统视场的增大。
[0050]
实施例5、6与实施例4的区别在于反射面参数不同,其他均相同。
[0051]
实施例5
‑
6的所述离轴主镜l1和离轴次镜l2反射面参数见表4。表中r为反射面的
曲率半径,d为离轴主镜l1与离轴次镜l2的顶点沿光轴负方向的距离。
[0052]
表4
[0053][0054][0055]
本实施例4的技术指标见表5:
[0056]
表5
[0057][0058]
实施例7
[0059]
如图1所示,本实施例与实施例1区别之处在于所述的离轴次镜l2加入倾斜量(即x向alpha旋转角度)和y向偏心量代替仅离轴,其目的是校正系统中离轴主镜l1和离轴次镜l2均为正光焦度所带来的离轴非对称场曲,后组分光系统的场曲校正更为容易,同时可将出射光线光轴与入射光线光轴处理平行,更为适合后组光学元件布局;x向alpha旋转角度为
‑
0.1
°
~
‑
0.5
°
,y向偏心量为0.1~0.5mm。
[0060]
实施例8、9与实施例7的区别在于反射面参数、倾斜量(即x向alpha旋转角度)和y向偏心量不同,其他均相同。
[0061]
实施例7
‑
9的所述离轴主镜l1和离轴次镜l2反射面参数、y向偏心量,x向alpha旋转角度见表6。表中r为反射面的曲率半径,d为离轴主镜l1与离轴次镜l2的顶点沿光轴负方向的距离,h为y向偏心量(即离轴次镜顶点偏离离轴主镜l1母线(图1中的点划线)的距离),
θ为x向alpha旋转角度(即离轴次镜l2顶点切面与垂直面之间的夹角)。
[0062]
表6
[0063][0064]
本实施例7的技术指标见表7:
[0065]
表7
[0066][0067]
实施例10
[0068]
如图1所示,本实施例与实施例1区别之处在于所述离轴次镜l2的反射面采用双曲面,采用双曲面能够进一步提升离轴次镜l2对系统轴外像差的校正能力,同时平衡离轴主镜l1所产生的球差;k=
‑
1.024~
‑
3.5。
[0069]
实施例11、12与实施例10的区别在于反射面参数、k的数值不同,其他均相同。
[0070]
实施例10
‑
12的所述离轴主镜l1和离轴次镜l2反射面参数、k的数值见表8。表中r为反射面的曲率半径,d为离轴主镜l1与离轴次镜l2的顶点沿光轴负方向的距离。
[0071]
本实施例10的技术指标见表9。
[0072]
表8
[0073][0074]
表9
[0075][0076]
发明人还曾经采用多种离轴主镜l1和离轴次镜l2的面型组合方式,效果均不理想。
[0077]
离轴主镜l1和离轴次镜l2的面型采用椭球面与双曲面组合方式时,经过优化,波像差最好只能达到0.064λ(λ=632nm),相对畸变最好只能达到0.08%。
[0078]
离轴主镜l1和离轴次镜l2的面型采用双曲面与双曲面组合方式时,经过优化,波像差最好只能达到0.058λ(λ=632nm),相对畸变最好只能达到0.09%。
[0079]
离轴主镜l1和离轴次镜l2的面型采用椭球面与椭球面组合方式时,经过优化,波像差最好只能达到0.085λ(λ=632nm),相对畸变最好只能达到0.09%。
[0080]
离轴主镜l1和离轴次镜l2的面型均采用高次非球面组合方式时,经过优化,系统波像差和相对畸变与仅主镜采用高次非球面相当,但离轴次镜采用高次非球面增加了加工和检测难度。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。