1.本发明涉及水声参数估计技术领域,具体涉及一种基于深海垂直阵的波导不变量估计方法。
背景技术:
2.在低频声场中存在稳定的干涉结构,蕴含了丰富的目标运动信息和海洋环境信息。自1982年波导不变量理论问世,chuprov仅通过一个标量就描述了浅海声场中复杂的干涉结构,提出后各国研究学者从不同角度对声场的波导不变量性展开大量研究。brekhovskikh等人对波导不变量理论进行了简明的阐述,并对海洋声场空频干涉进行分析;rouseff等认为在海洋环境影响下,波导不变量应建模成一种分布形式,而不是一个常数;目前,声场波导不变量理论被广泛地应用在被动测距、水声通信、水声目标识别、海洋参数监测、海底参数估计等方面。而波导不变量值随波导环境、模态阶数的改变而变化,因此准确提取不同波导环境下的波导不变量具有重要的应用价值。
3.波导不变量的提取方法中常需要获得海洋环境参数或目标运动信息,很大程度上限制了算法的应用。现有的波导不变量提取方法包括利用频移补偿方法计算波导不变量、基于hough变换的波导不变量提取方法、利用lofar谱的二维傅里叶变换脊计算波导不变量、基于干涉条纹的波束形成提取波导不变量的方法等。针对于频移补偿方法计算声场的波导不变量,该方法通过将波导不变量设定在一定范围内进行搜索,最终选取波导不变量的值为使两个水听器所接收声信号的经频移补偿后的空间相关系数取最大值时对应的数值,从而估计出波导不变量。但是仿真和实验都表明在频率较低时,频率对波导不变量的取值有一定影响,波导不变量随频率变化剧烈。针对基于hough变换的波导不变量提取方法,其利用波束域信号进行处理,抗噪声能力强。缺点是该方法要求目标必须是运动的,目标方位变化要明显并且观测时间要足够长,不能进行实时处理。针对利用lofar谱的二维傅里叶变换脊计算波导不变量方法,该方法对海洋环境参数依赖性小,方便提取波导不变量,但是需要预知目标距离。此外,基于干涉条纹的波束形成提取波导不变量的方法仅适用于目标方位与阵列正横方向夹角小于30
°
的情况,工程上实现意义较小。
4.因此目前缺少一种在目标距离已知和未知两种情况下对波导不变量进行估计的简便方法。
技术实现要素:
5.有鉴于此,本发明提供了一种基于深海垂直阵的波导不变量估计方法,能够在目标距离已知和未知两种情况下对波导不变量进行估计,方法简便。
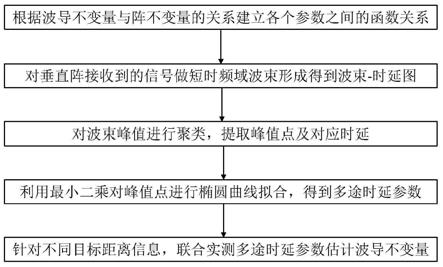
6.为达到上述目的,本发明的技术方案包括如下步骤:
7.s1建立波导不变量β、多途时延参数b
v
、信号到达掠射角θ、到达时延t和目标距离r之间的函数关系。
8.s2利用部署在深海海底的垂直水听器阵列接收到的目标辐射声信号,对其做短时
频域波束形成处理得到波束时延图。
9.s3对波束时延图进行聚类并提取波束峰值点及对应的时延值。
10.s4针对所提取的波束峰之巅利用最小二乘法进行曲线拟合从而求解多途时延参数。
11.s5针对不同的目标距离先验信息,联合实测多途时延参数估计波导不变量。
12.进一步地,基于深海垂直阵的波导不变量估计方法,其特征在于,s1具体包括如下步骤:
13.s11:根据波导不变量的定义据此推导出波导不变量的具体表达式,式中群速度相速度c为声速;s用于指代sinθ;s
g
为群慢度;s
p
为相慢度。
14.s12:根据步骤s11,得到
15.s13:对s12步骤中的公式左右整理并进行积分得式中定义b
v
为多途时延参数b
v
=r/(cβ);在横坐标为时间t,纵坐标为sinθ的波束—时间图中,直达声和多途到达信号拟合的曲线满足椭圆方程,且拟合椭圆的中心位于(0,t
c
),拟合椭圆的水平长半轴等于b
v
。
16.s14:由s13中的关系,推导出波导不变量、距离、声速和多途时延参数关系为
17.进一步地,基于深海垂直阵的波导不变量估计方法,其特征在于,s2包括如下具体步骤:
18.s21:选定某通道信号和时间窗t,对限定时间段内的信号做傅里叶变换分析目标信号的频率成分分布。
19.s22:选定信号频段f
l
‑
f
h
,f
l
、f
h
分别为信号频段的下限和上限;对所有通道信号做短时频域波束形成得到波达俯仰角φ,取余数得到各时间段接收声信号掠射角θ及其正弦值sinθ。
20.做一次短时频域波束形成,得到波束
‑
时延图并将峰值分贝化。
21.进一步地,基于深海垂直阵的波导不变量估计方法,其特征在于,s3包括如下步骤:
22.s31:经过s2步骤得到波束时延图后,找到其中峰值高于设定门限的峰值点。
23.s32:对到达时间紧邻的多个峰值点进行归类,即当两个峰值点到达时间间隔小于设定时间门限时,将两个峰值点视作一个集合。
24.s3:从聚类后的多个峰值集合中挑选峰值最大值的点
25.{s
max
(t1),s
max
(t2),...,s
max
(t
n
)};其中s
max
(t1),s
max
(t2),...,s
max
(t
n
)分别为第1~第n个峰值最大点,t1~t
n
分别为第1~第n个峰值最大点的时延值。
26.进一步地,基于深海垂直阵的波导不变量估计方法,其特征在于,s4包括如下子步
骤:
27.s41:利用最小二乘估计对s33中的峰值最大点进行椭圆拟合。
28.s42:得到拟合椭圆方程后计算椭圆水平长半轴的值。
29.s43:s42得到的椭圆水平长半轴的值即为多途时延参数b
v
。
30.进一步地,基于深海垂直阵的波导不变量估计方法,其特征在于,s5包括如下子步骤:
31.针对目标距离已知情况,结合s14步骤中各参数的关系,将r,b
v
,c三个参数带入到公式中得到该距离下的波导不变量。
32.针对目标距离未知情况,结合试验所测声速分布,利用bellhop仿真声信号到达俯仰角随距离变化曲线;结合s2步骤估计目标俯仰角,利用匹配俯仰角的方法估计目标距离,再带入到s14步骤公式中估计波导不变量。
33.有益效果:
34.1.本发明考虑目标距离已知和未知情况下波导不变量的计算,利用不同距离下波导不变量与多途到达时延的几何关系,在目标距离已知和未知两种情况下对波导不变量进行估计,方法简便。
35.2.本发明提出的基于深海垂直阵的波导不变量估计方法充分利用了阵列增益,且对海洋环境依赖性小,计算复杂度较低,可以节省大量的算法计算时间,更符合工程实际应用。
附图说明
36.图1为基于深海垂直阵的波导不变量估计方法流程图;
37.图2为实验装备部署图;
38.图3最小二乘椭圆曲线拟合结果图;
39.图4实验海区声速分布图;
40.图5声信号到达俯仰角随距离变化曲线;
41.图6波导不变量估计结果图;
42.图7波导不变量估计结果相对误差图。
具体实施方式
43.下面结合附图并举实施例,对本发明进行详细描述。
44.本发明提供了一种图1为本发明所述基于深海垂直阵的波导不变量估计方法流程图,以此为依据,对不同距离下的波导不变量进行估计。本例中考虑部署在海底附近的垂直水听器线阵,阵元数目为15,阵元间距为7.5m,垂直阵等效深度为4105.5m,海深4262m。实验船只拖曳气枪声源由近及远做匀速直线运动,运动速度约4节。气枪每90s发射一次信号,气枪等效深度约10m,声源距离约为5km
‑
20km。实验装备部署如图2所示。
45.选取目标距离为10.006km为例,深海垂直阵估计波导不变量步骤如下:
46.s1根据波导量和多途时延参数的关系,建立波导值β、多途时延参数b
v
、信号到达掠射角θ、到达时延t和距离r之间的函数关系;各参数之间的关系为
[0047][0048]
上式中,定义b
v
=r/(cβ)为多途时延参数。在横坐标为时间t,纵坐标为sinθ的波束—时间图中,直达声和多途反射信号拟合的曲线满足椭圆方程,并且椭圆中心位于(0,t
c
),b
v
为椭圆的水平长半轴。推导出波导不变量、距离、声速和多途时延参数关系为
[0049]
s2利用部署在深海海底附近的垂直水听器阵列接收到的目标辐射声信号,对其做频域波束形成处理得到波束—时延图。
[0050]
步骤s2中得到波束
‑
时延图具体步骤如下:
[0051]
s21选定某通道信号和时间窗t,对限定时间段内的信号做傅里叶变换分析目标信号的频率成分分布,本例中选取5通道分析信号频率成分,时间窗选取t=30s。
[0052]
s22选定信号频段f
l
‑
f
h
,对15通道信号做短时频域波束形成得到波达俯仰角φ,取余数得到各时间段接收声信号掠射角θ及其正弦值sinθ;本例中,φ=21
°
,f
l
=20hz,f
h
=500hz,每隔0.2秒做一次短时频域波束形成,得到波束
‑
时延图并将峰值分贝化。
[0053]
s3对波束时延图进行聚类并提取波束峰值点及对应的时延值;具体步骤如下:
[0054]
s31找出峰值点中峰值高于设定门限
‑
10db的峰值点;
[0055]
s32对达到时间相近的多个峰值点进行聚类。当两个峰值点达到时间间隔小于2ms时,讲个峰值点视作一个集合;
[0056]
s33从聚类后的各个峰值点集合中挑选最大值{s
max
(t1),s
max
(t2),...,s
max
(t
n
)}。
[0057]
s4利用最小二乘法进行曲线拟合从而求解多途时延参数;具体步骤如下:
[0058]
s41假设椭圆方程为ax2 2bxy cy2 2(dx ey) f=0,式中
[0059]
f=1,
[0060]
a c=1,
[0061]
a2 b2 c2 d2 e2 f2=1,
[0062]
a2 2b2 c2=1,
[0063]
ac
‑
b2=1.
[0064]
即对椭圆方程进行归一化;
[0065]
s42定义向量ξ=(x2,2xy,y2,2x,2y,1)
t
,θ=(a,b,c,d,e,f)
t
,则椭圆方程可以表示为(ξ,θ)=0,式中(α,β)表示α,β的内积。
[0066]
s43利用最小二乘法计算系数a,b,c,d,e,f从而得到椭圆方程,之后用椭圆方程来拟合步骤s33得到的峰值点。当最小二乘估计器使得最小时,对应的椭圆方程即为拟合得到椭圆方程,方程的水平半长轴即为多途时延参数b
v
。本例中对峰值点进行椭圆拟合,结果如图3所示。
[0067]
s5针对不同的目标距离先验信息,联合实测多途时延参数估计波导不变量;
[0068]
具体步骤如下:
[0069]
s51针对目标距离已知情况,结合s14步骤中各参数的关系,将r,b
v
,c三个参数带入到公式中得到该距离下的波导不变量;本例中r=10.006km,b
v
=5.8693,c=1530m/s,计
算出波导不变量β=1.1143。
[0070]
s52针对目标距离未知情况,结合试验所测声速分布(如图4),利用bellhop仿真声信号到达俯仰角随距离变化曲线(如图5)。结合s2步骤估计目标俯仰角匹配俯仰角估计目标距离r≈9.85km,再带入到s1步骤公式中估计波导不变量β=1.0969。
[0071]
本例利用目标距离范围为5km
‑
20km的气枪声信号进行距离估计,并将所提方法估计不同距离的波导不变量和仿真值进行对比,结果和误差对比如图6、7所示。针对目标距离已知情况,波导不变量估计值与理论计算值基本吻合,相对误差在10%以内,估计精度较高;针对目标距离未知情况,在小于17km范围内估计效果较好,相对误差在15%以内。在大于17km距离时,波导不变量估计结果较差。结合图5分析可知,目标距离未知情况下,利用匹配俯仰角方法估计目标距离时,在中近距离条件下垂直阵接受信号俯仰角随距离变化明显,估计距离准确,因此解算的波导不变量精度高。对于较远距离(大于17km)的目标,俯仰角随距离变化缓慢,方位估计精度极大影响距离的解算,因此对于后续波导不变量的求解也有较大影响。
[0072]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。