1.本发明涉及磁偏角测量技术领域,具体为一种基于高精度电子罗盘的磁偏角测量方法。
背景技术:
2.近年,伴随我国经济的高速发展,机场作为解决交通出行、物流运输的有效手段,各地机场建筑方兴未艾,截止2020年我国通用机场总数超过340个,未来五年机场总数将很快突破500个。
3.磁偏角是机场建设中一个重要的测量数据,目前的机场规范要求磁偏角的测量精度优于0.1
°
,而目前教科书和有关测量规范并未给出相关方案,综合目前的实践,比较多的方法有1、无磁经纬仪 高精度磁力仪;2、无磁经纬仪 磁针。但是由于1和2方案中都涉及无磁经纬仪,可是由于无磁经纬仪应用场景少,厂家基本处于停产状态,对于日益增加的机场数据测量,各个检测单位显得捉襟见肘,而使用常规的经纬仪的测量方式方法难以满足人们的要求。
技术实现要素:
4.(一)解决的技术问题
5.针对现有技术的不足,本发明提供了一种基于高精度电子罗盘的磁偏角测量方法,解决了目前使用常规的经纬仪的测量方式方法难以满足人们的要求,不能很好的测量机场磁偏角的问题。
6.(二)技术方案
7.为实现上述目的,本发明提供如下技术方案:
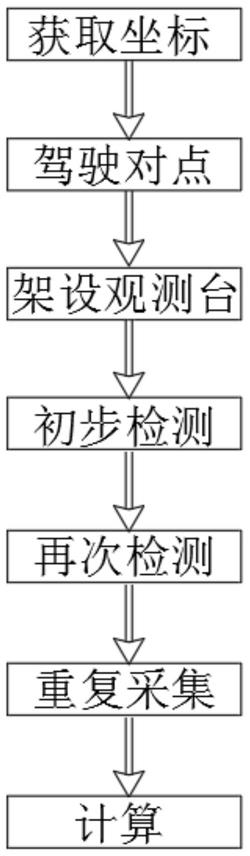
8.一种基于高精度电子罗盘的磁偏角测量方法,包括以下步骤:
9.s1:获取坐标,在机场跑道区域,选择无磁环境良好的空旷场地,布设定位桩a和b,使用全站仪或者gps对定位桩进行观测,获取本地控制坐标成果和wgs84的经纬度坐标;
10.s2:架设对点,将常规经纬仪架和后视目标对点,然后固定;
11.s3:架设观测台,在a
‑
b的连线方向,远离a点至少30米,使用无磁材料设置高精度电子罗盘测量杆观测台,高精度电子罗盘使用至少5米的线缆连接计算机;
12.s4:初步检测,在无磁高精度电子罗盘测量杆的瞄准线和望远镜视准线重合的情况下,记录高精度电子罗盘的磁场角示值a1;
13.s5:再次检测,转动无磁高精度电子罗盘测量杆180度,在无磁高精度电子罗盘测量杆的瞄准线和望远镜视准线重合时,记录高精度电子罗盘的磁场角示值a2;
14.s6:重复采集,重复s4、s5步骤的磁场角示值观测过程,采集6组12个示值;
15.s7:计算,a
‑
b单边测量结束完毕后,将数据导入到表格中,通过最小二乘法计算a
‑
b连线的磁场角,评估测量的精度,结合a
‑
b的真北角度数据,计算得到机场跑道的磁偏角。
16.作为本发明再进一步的方案,所述s1中的无磁环境良好的空旷场地为远离铁、镍
的强磁金属构建物至少5
‑
20米。
17.进一步的,所述s2中常规经纬仪优选为全站仪。
18.在前述方案的基础上,所述s3中检测时需要清除随身的金属附件、电子设备、眼镜。
19.进一步的,所述s7中使用最小二乘法,对测量数据进行处理时,需要剔除粗差,评估测量结果的精度,提交合格磁场角数据,最终计算机场跑道方向的磁偏角。
20.在前述方案的基础上,所述s4中检测时左右移动的距离为1
‑
50米。
21.本发明再进一步的方案,所述s4中无磁高精度电子罗盘测量杆包括测量杆本体、电子罗盘、前v型瞄准器和后v型瞄准器,电子罗盘位于测量杆本体的一侧,前v型瞄准器和后v型瞄准器位于测量杆本体的上表面。
22.(三)有益效果
23.与现有技术相比,本发明提供了一种基于高精度电子罗盘的磁偏角测量方法,具备以下有益效果:
24.1、本发明将无磁高精度电子罗盘测量杆的瞄准线和望远镜视准线重合,记录高精度电子罗盘的磁场角示值a1,方便观测视准线与测量杆的平行时的磁场角的角度测量。
25.2、本发明中,能够通过对无磁高精度电子罗盘测量杆的全圆观测法的观测,计算出符合规范要求的磁偏角,实现了无需无磁经纬仪、高精度磁力仪的磁偏角测量,可以大大提高应用场景,为机场的建设、运维、导航提供可靠的数据支持。
26.3、本发明使用最小二乘法,对测量数据进行处理时,需要剔除粗差,评估测量结果的精度,提交合格磁场角数据,最终计算机场跑道方向的磁偏角,通过最小二乘法的全圆观测法数据处理,实现高精度级别磁偏角测量的系统。
附图说明
27.图1为本发明提出的一种基于高精度电子罗盘的磁偏角测量方法的流程结构示意图;
28.图2为本发明提出的一种基于高精度电子罗盘的磁偏角测量方法的模块结构示意图;
29.图3为本发明提出的一种基于高精度电子罗盘的磁偏角测量方法的无磁高精度电子罗盘测量杆主视结构示意图;
30.图4为本发明提出的一种基于高精度电子罗盘的磁偏角测量方法的无磁高精度电子罗盘测量杆侧视结构示意图。
31.图中:1、测量杆本体;2、电子罗盘;3、前v型瞄准器;4、后v型瞄准器。
具体实施方式
32.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
33.实施例1
34.参照图1
‑
4,一种基于高精度电子罗盘的磁偏角测量方法,包括以下步骤:
35.s1:获取坐标,在机场跑道区域,选择无磁环境良好的空旷场地,在平行于机场跑道方向至少20米处,使用无磁材料布设间隔400米的定位桩a和b,使用全站仪或者gps对定位桩进行观测,获取本地控制坐标成果和wgs84的经纬度坐标;
36.s2:架设对点,将常规经纬仪架设在定位桩a上,完成向下对点,同时将后视目标架设在另一个定位桩b上,完成向下对点,然后转动经纬仪a指向后视目标b,固定经纬仪视准轴望远镜方向;
37.s3:架设观测台,在a
‑
b的连线方向,远离a点至少30米,使用无磁材料架设高精度电子罗盘测量杆观测台,高精度电子罗盘使用至少5米的线缆连接计算机;
38.s4:初步检测,经纬仪观测员指挥检测时左右移动和旋转转动,将无磁高精度电子罗盘测量杆的瞄准线和望远镜视准线重合,记录高精度电子罗盘的磁场角示值a1,方便观测视准线与测量杆的平行时的磁场角的角度测量;
39.s5:再次检测,将无磁高精度电子罗盘测量杆旋转180度,经纬仪观测员指挥检测时左右移动和旋转转动,将无磁高精度电子罗盘测量杆的瞄准线和望远镜视准线重合,记录高精度电子罗盘的磁场角示值a2,能够通过对无磁高精度电子罗盘测量杆的全圆观测法的观测,计算出符合规范要求的磁偏角,实现了无需无磁经纬仪、高精度磁力仪的磁偏角测量,可以大大提高应用场景,为机场的建设、运维、导航提供可靠的数据支持;
40.s6:重复采集,重复s4、s5步骤的磁场角示值观测过程,采集6组12个示值;
41.s7:计算,a
‑
b单边测量结束完毕后,将数据导入到表格中,通过最小二乘法计算a
‑
b连线的磁场角,评估测量的精度,结合a
‑
b的真北角度数据,计算得到机场跑道的磁偏角,通过最小二乘法的全圆观测法数据处理,实现高精度级别磁偏角测量的系统。
42.本发明的s1中的无磁环境良好的空旷场地为远离铁、镍的强磁金属构建物至少5米,这样能够排除磁干扰,提高测量的准确性,s2中常规经纬仪优选为全站仪,s3中检测时需要清除随身的金属附件、电子设备、眼镜,s7中使用最小二乘法,对测量数据进行处理时,需要剔除粗差,评估测量结果的精度,提交合格磁场角数据,最终计算机场跑道方向的磁偏角,s4中无磁高精度电子罗盘测量杆包括测量杆本体1、电子罗盘2、前v型瞄准器3和后v型瞄准器4,电子罗盘2位于测量杆本体1的一侧,前v型瞄准器3和后v型瞄准器4位于测量杆本体1的上表面。
43.实施例2
44.参照图1
‑
4,一种基于高精度电子罗盘的磁偏角测量方法,包括以下步骤:
45.s1:获取坐标,在机场跑道区域,选择无磁环境良好的空旷场地,在平行于机场跑道方向至少20米处,使用无磁材料布设间隔400米的定位桩a和b,使用全站仪或者gps对定位桩进行观测,获取本地控制坐标成果和wgs84的经纬度坐标;
46.s2:架设对点,将常规经纬仪架设在定位桩a上,完成向下对点,同时将后视目标架设在另一个定位桩b上,完成向下对点,然后转动经纬仪a指向后视目标b,固定经纬仪视准轴望远镜方向;
47.s3:架设观测台,在a
‑
b的连线方向,远离a点至少30米,使用无磁材料架设高精度电子罗盘测量杆观测台,高精度电子罗盘使用至少5米的线缆连接计算机;
48.s4:初步检测,经纬仪观测员指挥检测时左右移动和旋转转动,将无磁高精度电子
罗盘测量杆的瞄准线和望远镜视准线重合,记录高精度电子罗盘的磁场角示值a1,方便观测视准线与测量杆的平行时的磁场角的角度测量;
49.s5:再次检测,将无磁高精度电子罗盘测量杆旋转180度,经纬仪观测员指挥检测时左右移动和旋转转动,将无磁高精度电子罗盘测量杆的瞄准线和望远镜视准线重合,记录高精度电子罗盘的磁场角示值a2,能够通过对无磁高精度电子罗盘测量杆的全圆观测法的观测,计算出符合规范要求的磁偏角,实现了无需无磁经纬仪、高精度磁力仪的磁偏角测量,可以大大提高应用场景,为机场的建设、运维、导航提供可靠的数据支持;
50.s6:重复采集,重复s4、s5步骤的磁场角示值观测过程,采集6组12个示值;
51.s7:计算,a
‑
b单边测量结束完毕后,将数据导入到表格中,通过最小二乘法计算a
‑
b连线的磁场角,评估测量的精度,结合a
‑
b的真北角度数据,计算得到机场跑道的磁偏角,通过最小二乘法的全圆观测法数据处理,实现高精度级别磁偏角测量的系统。
52.本发明的s1中的无磁环境良好的空旷场地为远离铁、镍的强磁金属构建物至少20米,这样能够排除磁干扰,提高测量的准确性,s2中常规经纬仪优选为全站仪,s3中检测时需要清除随身的金属附件、电子设备、眼镜,s7中使用最小二乘法,对测量数据进行处理时,需要剔除粗差,评估测量结果的精度,提交合格磁场角数据,最终计算机场跑道方向的磁偏角,s4中检测时左右移动的距离为1
‑
50米,s4中无磁高精度电子罗盘测量杆包括测量杆本体1、电子罗盘2、前v型瞄准器3和后v型瞄准器4,电子罗盘2位于测量杆本体1的一侧,前v型瞄准器3和后v型瞄准器4位于测量杆本体1的上表面。
53.在该文中的描述中,需要说明的是,诸如第一和第二等之类的关系术语仅仅用来将一个实体或者操作与另一个实体或操作区分开来,而不一定要求或者暗示这些实体或操作之间存在任何这种实际的关系或者顺序。而且,术语“包括”、“包含”或者其任何其他变体意在涵盖非排他性的包含,从而使得包括一系列要素的过程、方法、物品或者设备不仅包括那些要素,而且还包括没有明确列出的其他要素,或者是还包括为这种过程、方法、物品或者设备所固有的要素。
54.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。