1.本发明涉及牲畜位置的判定。
背景技术:
2.牲畜电子识别标签可用于牲畜识别。标签牢固附连至牲畜,通常是牲畜耳朵上。通过读取标签就可对牲畜进行唯一识别。
技术实现要素:
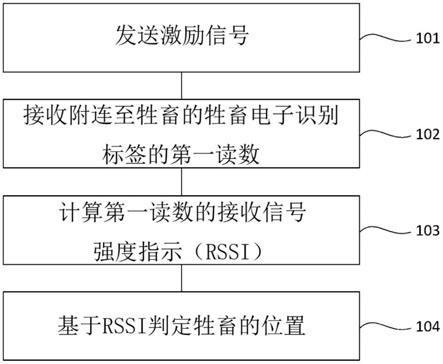
3.在第一示例性实施例中,提供了一种方法,该方法包括:接收来自第一电子标签识读器的附连至牲畜的牲畜电子识别标签的第一读数;计算该第一读数的接收信号强度指示(rssi);以及基于rssi判定牲畜的位置。
4.在第二示例性实施例中,提供了一种方法,该方法包括:接收附连至第一牲畜的第一牲畜电子识别标签的第一读数;计算该第一读数的接收信号强度指示(rssi);接收附连至第二牲畜的第二牲畜电子识别标签的第二读数;计算该第二读数的接收信号强度指示;以及基于第一读数的rssi和第二读数的rssi判定第一牲畜的位置。
附图说明
5.下面通过示例的方式参照附图对本发明进行描述,附图中仅示出了本发明的一些实施例。但是,这些实施例仅供说明之用。本发明并不限于附图和相应说明书中的具体细节。
6.图1是根据第一实施例的一种用于判定牲畜位置的示例性方法的示图;
7.图2是可使用图1中方法的牲畜标签读取系统的示图;
8.图3是根据第二实施例的用于判定牲畜位置的示例性方法的示图;和
9.图4是可使用图3中方法的牲畜标签读取系统的示图。
具体实施方式
10.在一些实施例中,提供了一种用于判定牲畜位置并由此判定附连标签的牲畜的位置的方法。附连牲畜的电子标签的第一读数由第一标签识读器接收。计算该第一读数的rssi。然后基于该rssi判定电子标签的位置。在其他实施例中,提供了一种用于在指定位置识别牲畜电子识别标签的方法。识读器接收附连至第一牲畜的第一标签的第一读数和附连至第二牲畜的第二标签的第二读数。基于每个读数的rssi,可推导出第一牲畜的位置(至少相对于第二牲畜)。
11.使用rssi使得标签与位置相关联。在不同的情况下,这可用于识别特定牲畜的位置,或识别特定位置的牲畜。
12.例如,一些畜牧场的入口或出口有多条跑道(race),并且每条跑道均有识读器以读取经过跑道的牲畜的标签。不同的牲畜在不同的跑道中并行前进。与只有一个入口或出
口的畜牧场相比,这提高了吞吐量。但是,由于跑道相距很近,存在交叉读取的风险,也就是说,识读器可能会读取相邻跑道中牲畜身上的标签。这导致难以判定牲畜经过的跑道。然而,牲畜电子识别标签的读取rssi通常随距离的增加而降低,因此,靠近标签的识读器的读数rssi往往高于远离标签的识读器的读数rssi。牲畜经过跑道时,其标签应该更靠近该跑道的识读器,而不是任何其他跑道的识读器。因此,rssi可用于判定标签的位置,并由此判定附连标签的牲畜的位置。
13.牲畜位置的判定:第一实施例
14.图1示出了一种用于判定牲畜位置的示例性方法。该方法使用包括至少一个电子标签识读器的系统来执行。
15.在步骤101中,电子标签识读器发送激励信号。激励信号用于为附连至牲畜的牲畜电子识别标签供电。激励信号可周期性地产生,例如每100ms产生一次,并且可在周期的预设部分持续,例如周期的40%。
16.在步骤102中,电子标签识读器(可与执行步骤101的电子标签识读器相同)接收牲畜电子识别标签的第一读数。该读数包括标识符,如96位电子产品代码。该标识符用于唯一识别其附连的牲畜。例如,如果多个牲畜电子识别标签附连在同一牲畜身上,则每个标签具有相同的标识符。
17.在步骤103中,计算读数的接收信号强度指示(rssi)。这可由执行步骤102的电子标签识读器或单独的控制器来执行。rssi反映了从标签接收到的信号的强度。信号强度越强,rssi越大。rssi可作为信号功率电平的函数(例如,以毫瓦或毫瓦分贝为单位)来计算。rssi往往随距离而变化。因此,在其他条件相同的情况下,距离识读器较近的标签的rssi往往比距离识读器较远的标签的rssi大。
18.在某些情况下,rssi是一个相对数,例如,与识读器接收到的平均信号强度(可能是最近一段时间内的)相对的信号强度。在这种情况下,rssi为正数则意味着接收到的读数的信号强度大于平均信号强度。
19.在步骤104中,基于rssi判定牲畜的位置。这可由控制器执行。
20.位置可以是相对粗放的区域,例如,畜牧场中的围栏或多跑道标签识读器系统中的跑道。在某些情况下,这些区域与多个识读器中一个相关联。例如,每个围栏或跑道有一个相应的识读器。
21.当单个识读器对一标签有一个或多个读数时,一个或多个读数的rssi可判定该标签是否位于对应于该识读器的位置。在某些情况下,如果至少一个读数的rssi高于阈值,则判定该标签位于该位置。该阈值可基于预期阈值距离进行判定。由于rssi较大往往意味着标签靠近识读器,因此,只有当标签距离识读器更近时,在阈值较高的情况下才能做出明确的判定。
22.在其他情况下,rssi可用于估算与识读器之间的距离。rssi通常与标签和识读器之间的距离相关。使用这种相关性可计算出与识读器之间的近似距离。例如,可使用在rssi样本值和相应距离上训练的模型。
23.这样,使用rssi可更准确地判定牲畜电子识别标签的位置,并由此判定牲畜的位置。
24.当多个识读器中的每一个有一个或多个读数且每个识读器与不同的位置相关联
时,可使用rssi判定标签所在的位置。在某些情况下,仅基于rssi最高的读数来判定位置。
25.然而,在某些情况下,可基于多个读数来判定位置以提高准确性。因此,可将每个读数放在一起考虑以判定位置。
26.例如,如果接收到来自一识读器序列中的多个识读器的读数,则rssi可形成一曲线,曲线的最大值对应于该识读器序列中心的识读器。在这种情况下,标签的位置可以是中心识读器的位置。
27.在某些情况下,位置判定实时发生。这在识读器系统中的某些部分基于读数自动受控时适用。在一些配置中,牲畜可进入出口门关闭的跑道中。在读取牲畜的标签时,相应的门打开,允许牲畜离开跑道。这种系统需要实时判定电子标签的位置(即时滞小于几秒),以使系统有效运行。
28.在某些情况下,基本上在接收读数之后发生。存储每个读数。这些读数可本地存储在识读器内存中。或者另外地,可将这些读数发送给远程设备,如控制器。该远程设备可接收多个识读器的读数,并基于多个读数判定位置。
29.例如,在所有牲畜都经过带有多个跑道的识读器系统后,可分析读数以判定牲畜经过系统时的路径,尤其是牲畜经过的跑道。
30.行为与移动
31.上述技术可用于判定标签的位置(并由此判定附连标签的牲畜的位置)。
32.在某些情况下,可基于rssi确定其他信息。
33.标签通常附连至牲畜头部(如耳朵)。因此,rssi通常与牲畜头部和识读器之间的距离相关。
34.在某些情况下,这可用于判定牲畜的行为,例如,牲畜是否将头部放置在特定位置,如食槽或饮水点。如果识读器设置在该位置或其下方,则rssi通常会随牲畜低头(例如,进食或饮水)而增加。这可用于帮助辨别牲畜何时是在进食或饮水,而不是仅站在食槽或饮水点附近。
35.在一些实施例中,可随时监测标签的位置(并由此监测牲畜的位置)。该监测可显示位置变化,位置变化指示出方向、路径或移动与否。这样即可通过识读器系统或其他基础设施使用一系列读数来跟踪牲畜的移动。
36.标签读取系统
37.上述方法在电子标签读取系统具有多条跑道的情况下适用。该系统可设置在畜牧场或牧场内不同区域的入口或出口处,或在将牲畜装载到卡车等运输工具或从卡车等运输工具卸下时设置。使用多条跑道可增加吞吐量。还可使用多条跑道将一群牲畜分隔在不同的区域,其中,第一跑道通向第一区域,第二跑道通向第二区域。
38.只设有单条跑道时,在标签读取系统中判定牲畜的位置相对简单,因为牲畜必然在该条跑道中。然而,有多条跑道时,判定则不再准确,因为第一跑道中的识读器可能会无意间读取第二跑道中牲畜身上的标签。这些“交叉读取”意味着识读器在特定位置的读数并不直接对应于牲畜的位置。因此,判定牲畜经过标签读取系统的位置(即牲畜通行的跑道)非常有用。
39.图2示出了依次设有三条跑道201、202、203的示例性标签读取系统200。每条跑道201、202、203具有一对相对的跑道壁,限定通行跑道201、202、203的路径。在某些情况下,跑
道壁可与相邻跑道201、202、203共享。每条跑道201、202、203的宽度可仅略大于牲畜的最大预期宽度,以鼓励牲畜排成单行依次通行,而这可提高标签读数的准确性。
40.一个或多个识读器211、212、213与每条跑道相关联。每个识读器211、212、213可安装在每条相应跑道201、202、203的跑道壁内。例如,识读器的线圈可穿过相应跑道的两个相对的跑道壁。这样的设置可提供大致均匀的穿过跑道201、202、203的磁场,例如,通过在亥姆霍兹配置中进行操作。
41.在使用中,牲畜经由入口进入跑道201、202、203,然后经过相应的识读器211、212、213并通过出口离开跑道201、202、203。牲畜经过时,识读器211、212、213中的一个或多个生成该牲畜标签的一个或多个读数。根据牲畜的标签与各识读器之间的距离,这些读数中的每一个均有一个不同的rssi。
42.例如,如图2中所示,牲畜220在跑道202中。识读器211、212和213每个均接收到来自附连至牲畜220耳朵的牲畜电子识别标签230的读数。识读器212可获得rssi相对较高的第一读数,因为牲畜识别标签230与识读器212之间的距离相对较近。识读器213可获得一个rssi相对较低的第二读数,因为牲畜识别标签230与识读器213之间的距离相对较远。识读器211可能根本未获得读数。
43.这些读数可通过有线或无线的方式发送至控制器250。控制器250可实时或在一段延迟后分析读数,以判定标签的位置,并由此判定标签附连的牲畜的位置。
44.因此,通过使用rssi来区分相同标签的读数,可判定牲畜所在的位置(即跑道)。
45.在某些情况下,标签读取系统可包括物理结构以增大信号衰减。这可随距离进一步降低rssi,并由此提高位置判定的整体准确度。
46.例如,可在相邻跑道之间设置屏蔽装置241、242。因此,屏蔽装置241可位于跑道201和202之间,屏蔽装置242可位于跑道202和203之间。屏蔽装置可配置为阻挡电磁信号和(或)射频信号,并由此使得通行跑道之间的信号的强度衰减。例如,在相应跑道的跑道壁上或跑道壁内设置铜制或钢制等金属网。因此,交叉读取(即第一跑道内的识读器读取第二跑道内的标签)导致rssi明显低于相同跑道内的标签读数。
47.牲畜位置的判定:第二实施例
48.图3示出了根据第二实施例的一种用于判定牲畜位置的示例性方法。该方法使用包括至少一个电子标签识读器的系统来执行。该电子标签识读器配置为在特定位置读取牲畜。该位置成为读取区。或者,该位置可相对于其他牲畜。例如,第一牲畜的位置可在一列中的第二牲畜之前。
49.在步骤301中,电子标签识读器发送激励信号。激励信号用于为附连至牲畜(例如读取区内的牲畜)的牲畜电子识别标签供电。激励信号可周期性地产生,例如每100ms产生一次,并且可在周期的预设部分持续,例如周期的40%。
50.在步骤302中,电子标签识读器(可与执行步骤101的电子标签识读器相同)接收第一牲畜电子识别标签的第一读数。该读数包括第一标识符,如96位电子产品代码。该标识符用于唯一识别其附连的牲畜。例如,如果多个牲畜电子识别标签附连在同一牲畜身上,则每个标签具有相同的标识符。
51.在步骤303中,计算第一读数的接收信号强度指示(rssi)。这可由执行步骤302的电子标签识读器或单独的控制器来执行。rssi反映了从标签接收到的信号的强度。信号强
度越强,rssi越大。rssi可作为信号功率电平的函数(例如,以毫瓦或毫瓦分贝为单位)来计算。rssi往往随距离而变化。因此,在其他条件相同的情况下,距离识读器较近的标签的rssi往往比距离识读器较远的标签的rssi大。
52.在步骤304中,电子标签识读器(可与执行步骤102的电子标签识读器相同)接收第二牲畜电子识别标签的第二读数。这可通过与步骤302相同的方式且与步骤302同时发生。第二读数包括不同于第一标识符的第二标识符。
53.由于接收到两个(或更多)读数,每个读数有不同的标识符,所以无法判定牲畜的读取区。这可能在牲畜间相隔很近时或者由于基础设施或其他环境条件使得第二标签的信号读取比预期的要远的情况下发生。
54.在步骤305中,计算第二读数的rssi。这可由执行步骤304的电子标签识读器或单独的控制器来执行。否则,也可通过与步骤303相同的方式且与步骤305同时发生。
55.在步骤306中,第一牲畜的位置基于第一读数的rssi和第二读数的rssi来判定。
56.例如,可判定第一牲畜在“读取区内”或“读取区外”。或者,可判定第一牲畜在第二牲畜之前。
57.在某些情况下,这可通过选择具有最高rssi的读数来实现。因为识读器配置为从读取区读取(因此,识读器可能靠近读取区),所以从读取区中的标签读取的读数的rssi可能会高于从读取区外的标签读取的读数。因此,如果第一读数的rssi最高,则可判定第一牲畜在读取区内。否则,可判定第一牲畜在读取区外。
58.如果随时间推移而获得多个读数,则这有助于判定第一牲畜相对于第二牲畜的位置。例如,如果在一固定周期读取多个读数,则特定标签的读数的rssi会随其靠近识读器而升高,然后随其远离识读器而下降。因此,rssi可随时间形成一rssi曲线。通过比较第一标签和第二标签相对于时间的曲线,可判定经过识读器的牲畜的队列。也就是说,最大值出现的时间较早的曲线与队列中出现较早的牲畜相关。由此可判定牲畜的相对位置。
59.以这种方式,可使用一个或多个读数的rssi来判定牲畜的位置。这使得可在预定位置内识别牲畜,如读取区。
60.标签读取系统
61.上述方法在标签读取系统的设定点有一列牲畜经过的情况下适用。
62.例如,在屠宰场中,牲畜挂在有规律间隔开的挂钩上。这些经过预定位置读取区的挂钩用于判定移动通过屠宰场该点位的牲畜。
63.在某些情况下,会同时读取两个或多头牲畜的标签。这在识读器的激励信号足够强可为多个标签供电的情况下发生。这也可能会受到信号传导远于预期的基础设施的影响。
64.接收到多个标签的读数时,会存在无法正确识别牲畜的风险。这可影响牲畜的可追溯性,其中,识读器将第一牲畜识别为第二牲畜。
65.此外,在某些情况下,只有在已识别读取区中的当前牲畜时,一列牲畜才能穿过读取区。这种系统需要准确识别牲畜才能有效运行。
66.图4示出了可使用图3中方法的示例性标签读取系统。
67.每头牲畜401、402、403挂在相应的挂钩411、412、413上,而挂钩又连接至皮带410。挂钩411、412、413等距间隔开。牲畜电子识别标签421、422、423附连至每头牲畜401、402、
403上。随着皮带向前移动,每头牲畜穿过具有识读器431的读取区430。
68.在使用中,皮带410可暂停直至成功接收到读取区中标签的读数。可通过判定接收到的读数的每个标签的位置来识别对应于读取区中标签的读数。一旦成功接收到读数,则皮带410移动,使得后面的牲畜进入读取区。
69.或者另外地,可使用该标识来提供牲畜的路径记录。在使用中,牲畜可在不同的方向上移动,例如发送到不同的目的地。通过记录多个读取区的牲畜,可判定每头牲畜的路径。这为路经屠宰场的牲畜提供了可追溯性。
70.预测算法
71.如上所述,可仅基于rssi进行位置判定。然而,在某些情况下,可基于rssi并结合一个或多个其他因素来判定位置。
72.在某些情况下,可将识读器或其他基础设施的物理距离或配置纳入判定中。例如,基础设施中的某些金属制品可能会以特定方式传导信号。这可导致远处的识读器的读数rssi高于仅根据距离预期的rssi。
73.在某些情况下,一个或多个物理传感器(例如重量传感器或运动传感器)的输出可用于指示牲畜处于特定位置时的时间。如果特定识读器的读数的rssi较高,这通常表明牲畜位于相应的位置。然而,如果重量传感器指示此处没有牲畜,则该牲畜必定在其他不同的位置。
74.在某些情况下,标签先前的位置和(或)自上次位置判定以来的时间可用于相应位置的判定。如果之前判定牲畜位于第一位置,则该牲畜不可能处于从第一位置无法物理到达的第二位置。同样地,牲畜的预期移动速度可基于先前的位置限制其可能的位置范围。
75.在某些情况下,可对某些识读器的数据的信赖度赋予不同的权重。如果存在一个识读器序列,则序列外的识读器可赋予更高的权重。这是因为序列外的识读器不太可能进行交叉读取,因其只有一个相邻的识读器。在其他情况下,可基于可靠性对识读器加权:由于技术或结构差异,一些识读器往往可提供更准确的读数。
76.实际上,为了判定位置,这些因素中的一个或多个可结合rssi向预测算法提供。使用多个因素可增加位置判定的准确性。
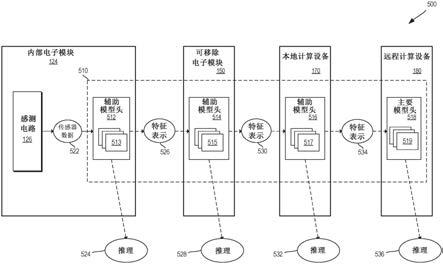
77.在某些情况下,预测算法可包括使用人工智能开发的模型。例如,可基于包含样本数据的训练集开发和训练神经网路。在使用过程中,可将rssi及其他数据提供给模型,然后由模型基于训练的神经网络输出判定的位置。
78.在某些情况下,存在多个可用的模型,可基于一个或多个标准做选择。在一般情况下,可使用第一模型,而在接收到预定数量的读数(例如超过50个读数)或从预定数量的不同识读器(例如超过三个识读器)接收到读数时,可使用第二模型。在不同的时间使用不同的判定模型可以提高位置判定的总体精度。
79.说明
80.一种用于判定牲畜位置的两个实施例在上文中已有述及。在某些情况下,这些实施例可并入单个实施方式中。
81.虽然描述了一系列步骤,但并非一定要按照规定的顺序执行这些步骤(除非上下文另有要求)。也就是说,在不同的实施例中,可乱序或并行执行这些步骤。
82.除非另有说明,否则术语“包括”及其他语法形式具有包含性含义。也就是说,这些
术语和语法形式应被视为包含列出的组件,并且也可能包含其他未列明的组件或元素。
83.已通过描述一些实施例来对本发明做了说明。虽然已经对这些实施例做了详细描述,但不能视为权利要求的范围受这些详细描述的约束或限制。本领域技术人员更容易明白另外的优点和修改。所以本发明在更广泛的层面上并不限于所示出或描述的具体细节。因此,可在不脱离发明总体构思的精神或范围的情况下对这些细节进行修改。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。