1.本发明涉及步行动作辅助装置。
背景技术:
2.作为腿不便利的人或由于中风等而有麻痹的人的步行辅助用或康复用的器具,提出了辅助腿的动作的具备电动马达等致动器的步行动作辅助装置(参照下述专利文献1)。
3.所述步行动作辅助装置构成为,能够相对于膝踝足支具装卸,能够向所述膝踝足支具中的小腿支架赋予前后方向的步行辅助力。
4.所述步行动作辅助装置具备:壳体,所述壳体以能够装卸的方式安装于所述膝踝足支具;所述致动器,所述致动器被支承于所述壳体;驱动臂,所述驱动臂利用来自所述致动器的旋转动力而向前后推动所述膝踝足支具中的小腿支架;大腿姿势检测单元,所述大腿姿势检测单元检测作为使用者的大腿的前后摆动角度的髋关节角度;大腿相位角算出单元,所述大腿相位角算出单元基于来自所述大腿姿势检测单元的髋关节角度算出大腿相位角;辅助转矩算出单元,所述辅助转矩算出单元具有规定了一个步行周期中的步行动作定时与应输出的转矩值的关系的输出转矩模式,将基于所述大腿相位角识别出的一个步行周期中的步行动作定时应用于所述输出转矩模式来算出应输出的转矩值;以及工作控制单元,所述工作控制单元进行所述致动器的工作控制以使得所述致动器输出由所述辅助转矩算出单元算出的转矩值的辅助力。
5.所述大腿相位角算出单元基于从所述大腿姿势检测单元输入的髋关节角度θ和对所述髋关节角度θ进行微分而得到的髋关节角速度ω,算出大腿相位角φ(=-arctan(ω/θ) π)。
6.在图10中,示意性地示出通过将由髋关节角度θ及髋关节角速度ω划定的大腿相位角φ(步行状态)遍及一个步行周期地标绘而得到的轨迹线图。
7.如图10所示,由髋关节角度θ及髋关节角速度ω划定的大腿相位角φ在一个步行周期中在0~2π之间变化。
8.详细而言,在将大腿位于比使用者的沿着铅垂方向的体轴靠前方及后方处的状态下的髋关节角度θ分别设为“正”及“负”,将大腿朝向前方及后方摆动的状态下的髋关节角速度ω分别设为“正”及“负”的情况下,当将髋关节角度θ在“负”的方向上成为最大且髋关节角速度ω为“零”的状态下的大腿相位角φ设为0时,在从大腿向后方侧最大摆动的状态(髋关节角度θ在“负”的方向上成为最大且髋关节角速度ω为“零”的状态、图10中的采样定时s(1))起到大腿以抬腿(自由腿,日文:遊脚)状态相对地向前方侧移动而与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“正”的方向上成为最大的状态)为止的期间(图10的步行区域a1)中,大腿相位角φ从0向π/2变化。
9.接着,在从提起的抬腿状态的大腿与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“正”的方向上成为最大的状态)起到进一步相对地向前方侧最大摆动的状态(髋关节角度θ在“正”的方向上成为最大且髋关节角速度ω为“零”的状态)为止
的期间(图10的步行区域a2)中,大腿相位角φ从π/2向π变化。
10.并且,在从抬腿状态的大腿向前方侧最大摆动的状态(髋关节角度θ在“正”的方向上成为最大且髋关节角速度ω为“零”的状态)起到经由脚后跟着地(英文:heel contact)而接地而成为立腿(日文:立脚)状态且该立腿状态的大腿相对地向后方侧摆动而与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“负”的方向上成为最大的状态)为止的期间(图10的步行区域a3)中,大腿相位角φ从相位角π向3π/2变化。
11.而且,在从立腿状态的大腿与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“负”的方向上成为最大的状态)起到相对地向后方侧摆动而向后方侧最大摆动的状态(髋关节角度在“负”的方向上成为最大且髋关节角速度为“零”的状态)为止的期间(图10的步行区域a4)中,大腿相位角φ从3π/2向2π变化。
12.在图10中示意性地记载的轨迹线图为了易于理解,使髋关节角度θ的标度(即,髋关节角度θ的振幅)与髋关节角速度ω的标度(即,髋关节角速度ω的振幅)一致,但实际上,髋关节角度θ的标度与髋关节角速度ω的标度不一致,而且两者的差异的程度按每个使用者而不同,更严格地说,即使在同一使用者中也可能根据步行周期而不同。
13.图11中示出一个使用者在某一步行周期中的轨迹线图的示意图。
14.在图11所示的例子中,髋关节角速度ω的标度成为髋关节角度θ的标度的约2倍。
15.从图10及图11的比较可知,图11与图10相比,在髋关节角度θ的绝对值大的区域(例如,采样定时s(1)~s(3))中,大腿相位角φ相对于时间经过的变化比例(即,一个采样定时与下一个采样定时之间的大腿相位角φ的移位比例)大,另一方面,在髋关节角度θ的绝对值小的区域(例如,采样定时s(7)~采样定时s(12))中,大腿相位角φ相对于时间经过的移位比例小。
16.在此,大腿相位角φ和步行周期中的周期步行动作定时t(即,使用相对于步行周期的百分率来表示大腿相位角φ位于一个步行周期中的哪个定时的定时)具有
17.t=(φ/2π)
×
100(%)
18.的关系。
19.因此,当髋关节角度θ的标度与髋关节角速度ω的标度不同时,基于大腿相位角φ算出的周期步行动作定时的变化比例根据一个步行周期中的大腿的摆动位置(即,髋关节角度θ的绝对值的大小)而大不同,无法准确地识别周期步行动作定时,结果,难以准确地得到基于周期步行动作定时算出的所述致动器应输出的转矩值。
20.这样,所述专利文献1所记载的步行动作辅助装置不是基于作为步行辅助力的赋予对象部位的小腿而是基于大腿的相位角φ来识别步行周期中的周期步行动作定时,由此,与基于小腿的动作来识别周期步行动作定时的结构相比,在具有不需要复杂的构造就能够识别周期步行动作定时这样的效果这一点上是有效的,但在准确地识别周期步行动作定时这一点上存在改善的余地。
21.现有技术文献
22.专利文献
23.专利文献1:日本专利第6148766号公报
技术实现要素:
24.本发明是鉴于该现有技术而完成的,其目的在于提供如下步行动作辅助装置,该步行动作辅助装置构成为基于大腿相位角来识别作为相对于步行周期的百分率的周期步行动作定时,并向小腿赋予与周期步行动作定时相应的步行辅助力,该步行动作辅助装置能够提高周期步行动作定时的识别精度。
25.为了达成所述目的,本发明提供一种步行动作辅助装置,所述步行动作辅助装置具备:致动器,所述致动器对使用者的步行动作赋予辅助力;大腿姿势检测单元,所述大腿姿势检测单元按每个采样定时检测与作为使用者的大腿的前后摆动角度的髋关节角度相关联的角度关联信号;大腿相位角算出单元,所述大腿相位角算出单元使用基于来自所述大腿姿势检测单元的角度关联信号而得到的髋关节角度及对该髋关节角度进行微分而得到的髋关节角速度来算出大腿相位角;辅助转矩算出单元,所述辅助转矩算出单元具有规定了一个步行周期中的周期步行动作定时与应输出的转矩值的关系的输出转矩模式,将基于所述大腿相位角识别出的一个步行周期中的周期步行动作定时应用于所述输出转矩模式来算出应输出的转矩值;以及工作控制单元,所述工作控制单元进行所述致动器的工作控制以使得所述致动器输出由所述辅助转矩算出单元算出的转矩值的辅助力,所述大腿相位角算出单元构成为,将基于来自所述大腿姿势检测单元的角度关联信号而得到的未正规化髋关节角度除以所存储的髋关节角度用正规化系数而算出正规化(规格化,日文:正規化)髋关节角度,并且将对所述未正规化髋关节角度进行微分而得到的未正规化髋关节角速度除以所存储的髋关节角速度用正规化系数而算出正规化髋关节角速度,使用所述正规化髋关节角度及所述正规化髋关节角速度来算出大腿相位角。
26.根据本发明的步行动作辅助装置,算出大腿相位角的大腿相位角算出单元构成为,将基于来自大腿姿势检测单元的角度关联信号而得到的未正规化髋关节角度除以所存储的髋关节角度用正规化系数来算出正规化髋关节角度,并且将对所述未正规化髋关节角度进行微分而得到的未正规化髋关节角速度除以所存储的髋关节角速度用正规化系数来算出正规化髋关节角速度,使用所述正规化髋关节角度及所述正规化髋关节角速度来算出大腿相位角,因此,能够使一个采样定时及下一个采样定时之间的大腿相位角的移位的程度遍及一个步行周期地均匀化,能够提高基于大腿相位角识别的周期步行动作定时的精度。
27.在一方式中,所述大腿相位角算出单元构成为,将在预定期间内基于来自所述大腿姿势检测单元的角度关联信号而得到的未正规化髋关节角度中的绝对值的最大值存储为所述髋关节角度用正规化系数,并且将对在所述预定期间内得到的未正规化髋关节角度进行微分而算出的未正规化髋关节角速度中的绝对值的最大值存储为所述髋关节角速度用正规化系数。
28.在其他方式中,所述大腿相位角算出单元将预先输入的人为输入髋关节角度及人为输入髋关节角速度分别存储为所述髋关节角度用正规化系数及所述髋关节角速度用正规化系数。
29.在所述其他方式中,优选的是,所述大腿相位角算出单元构成为,将在预定期间内基于来自所述大腿姿势检测单元的角度关联信号而得到的未正规化髋关节角度中的绝对值的最大值代替所述人为输入髋关节角度而覆写保存为所述髋关节角度用正规化系数,并
且将对在所述预定期间内得到的未正规化髋关节角度进行微分而算出的未正规化髋关节角速度中的绝对值的最大值代替所述人为输入髋关节角速度而覆写保存为所述髋关节角速度用正规化系数。
30.在所述一方式及所述其他方式中,所述预定期间是最近(最接近当前,日文:直近)完成的预定次数的步行周期。
31.取而代之,所述预定期间设为从该步行动作辅助装置的主电源被接通的时间点到最近完成的步行周期为止的期间。
32.本发明的步行动作辅助装置可以具备步行动作定时算出单元,该步行动作定时算出单元具有规定了大腿相位角与步行周期中的周期步行动作定时的关系的步行动作定时函数,将从所述大腿相位角算出单元发送来的大腿相位角应用于所述步行动作定时函数来算出步行周期中的周期步行动作定时。
33.在该情况下,所述辅助转矩算出单元构成为,将由所述步行动作定时算出单元算出的周期步行动作定时应用于所述输出转矩模式来算出应输出的转矩值。
附图说明
34.图1是能够安装本发明的步行动作辅助装置的膝踝足支具的主视图。
35.图2是图1中的ii部放大立体图。
36.图3是图2的分解立体图。
37.图4是图2的纵向剖视立体图。
38.图5是从使用者宽度方向内侧且前方观察本发明的一实施方式的步行动作辅助装置安装于膝踝足支具的状态的立体图。
39.图6是从安装面侧(使用者宽度方向内侧)观察所述步行动作辅助装置的分解立体图。
40.图7是从使用者宽度方向外侧观察所述步行动作辅助装置及所述膝踝足支具的分解立体图。
41.图8是所述步行动作辅助装置及所述膝踝足支具的分解纵向剖视图。
42.图9是所述步行动作辅助装置的控制框图。
43.图10是通过将由所述步行动作辅助装置中的控制装置算出的髋关节角度θ及髋关节角速度ω遍及一个步行周期地标绘而得到的轨迹线图,以使髋关节角度θ的标度(振幅)与髋关节角速度ω的标度(振幅)一致的状态示出。
44.图11是通过将由所述步行动作辅助装置中的控制装置算出的髋关节角度θ及髋关节角速度ω遍及一个步行周期地标绘而得到的轨迹线图,是将髋关节角速度ω的标度(振幅)设为髋关节角度θ的标度(振幅)的2倍的使用者的轨迹线图。
45.图12是以时间序列表示一个步行周期中的步行姿势的示意图。
46.图13是由所述步行动作辅助装置中的控制装置执行的致动器工作控制模式的流程图。
具体实施方式
47.以下,参照附图对本发明的步行动作辅助装置的一实施方式进行说明。
48.本实施方式的步行动作辅助装置100对穿戴有膝踝足支具1的使用者提供步行辅助力,能够安装于左腿用的膝踝足支具及右腿用的膝踝足支具中的任一个。
49.首先,关于所述膝踝足支具1,以左腿用膝踝足支具为例进行说明。
50.图1示出穿戴于使用者的左腿的左腿用膝踝足支具的主视图。
51.此外,左腿用膝踝足支具及右腿用膝踝足支具以通过使用者的沿着铅垂方向的体轴并在前后方向上延伸的中央垂直面为基准而左右对称。
52.所述膝踝足支具1是腿不便利的人或由于中风等而有麻痹的人为了步行辅助或为了康复而穿戴的器具,与使用者的体格相匹配地定制。
53.如图1所示,所述膝踝足支具1具有穿戴于使用者的大腿的大腿穿戴体11、以支承所述大腿穿戴体11的状态大致在上下方向上延伸的大腿支架20、穿戴于使用者的小腿的小腿穿戴体31、以及以支承所述小腿穿戴体31的状态大致在上下方向上延伸的小腿支架40。
54.所述大腿穿戴体11及所述小腿穿戴体31只要能够分别穿戴于使用者的大腿及小腿即可,能够采取各种形态。
55.在本实施方式中,所述大腿穿戴体11设为具有能够供使用者的大腿插入且对于大腿来说合身这样的大小的穿戴孔的筒状。
56.同样,所述小腿穿戴体31设为具有能够供使用者的小腿插入且对于小腿来说合身这样的大小的穿戴孔的筒状。
57.在本实施方式中,如图1所示,所述大腿支架20具有在所述大腿穿戴体11的使用者宽度方向w的外侧处大致在上下方向上延伸的第1大腿支架20(1)和在所述大腿穿戴体11的使用者内侧处大致在上下方向上延伸的第2大腿支架20(2)。
58.同样,所述小腿支架40具有在所述小腿穿戴体31的使用者宽度方向w的外侧处大致在上下方向上延伸的第1小腿支架40(1)和在所述小腿穿戴体31的使用者宽度方向w的内侧处大致在上下方向上延伸的第2小腿支架40(2)。
59.在图2中示出图1中的ii部放大立体图。
60.另外,在图3中示出图2的分解立体图。
61.此外,在图3中,为了容易理解,省略了构成构件的一部分的图示。
62.而且,在图4中示出图2的纵向剖视立体图。
63.如图1~图4所示,所述小腿支架40经由支具侧转动连结部50而以能够绕与使用者的膝关节在同轴上的支具侧枢支轴线x摆动的方式连结于所述大腿支架20。
64.如前所述,在本实施方式中,所述大腿支架20具有所述第1及第2大腿支架20(1)、20(2),所述小腿支架40具有所述第1及第2小腿支架40(1)、40(2)。
65.在该情况下,所述第1小腿支架40(1)的上端部经由第1支具侧转动连结部50(1)而以能够绕支具侧枢支轴线x摆动的方式连结于所述第1大腿支架20(1)的下端部,所述第2小腿支架40(2)的上端部经由第2支具侧转动连结部50(2)而以能够绕支具侧枢支轴线x摆动的方式连结于所述第2大腿支架20(2)的下端部。
66.详细而言,如图2~图4所示,所述大腿支架20具有在上下方向上延伸的支架主体21c、和通过销连结或焊接等而固定接合于所述支架主体21c的下端部的使用者宽度方向w的两侧处的一对连结片21a、21b,对应的所述小腿支架40的上端部介于所述一对连结片21a、21b之间。
67.大腿支架安装孔20a以与支具侧枢支轴线x在同轴上的方式设置于所述一对连结片21a、21b,小腿支架安装孔40a以与支具侧枢支轴线x在同轴上的方式设置于所述小腿支架40。
68.所述支具侧转动连结部50具有支具侧连结件51,所述支具侧连结件51插通于由所述大腿支架安装孔20a及所述小腿支架安装孔40a形成的支具侧支架安装孔而使对应的所述大腿支架20及所述小腿支架40彼此以能够绕支具侧枢支轴线x转动的方式连结。
69.如图2~图4所示,所述支具侧连结件51具有在所述支具侧支架安装孔内互相能够分离地螺纹接合的内螺纹构件52及外螺纹构件55。
70.所述内螺纹构件52具有从使用者宽度方向一方侧插入于所述支具侧支架安装孔的筒部53、和从所述筒部53的使用者宽度方向一方侧比所述支具侧支架安装孔向径向外侧延伸的凸缘部54,在所述筒部53形成有向自由端侧开放的螺纹孔。
71.另一方面,所述外螺纹构件55具有从使用者宽度方向另一方侧螺入于所述螺纹孔的形成有外螺纹的筒部56、和从所述筒部56的使用者宽度方向另一方侧比所述支具侧支架安装孔向径向外侧延伸的凸缘部57。
72.如图2~图4所示,在本实施方式中,所述内螺纹构件52从插入于所述大腿穿戴体11的使用者的大腿侧插入于所述支具侧支架安装孔,所述外螺纹构件55从与使用者的大腿相反的一侧与所述内螺纹构件52螺纹接合。
73.此外,图3及图4中的附图标记54a是设置于所述凸缘部53的径向外侧突起,通过与形成于所述内侧连结片21b的凹部22(参照图3)卡合,从而所述内螺纹构件52被保持为不能相对于所述内侧连结片21b(即,所述大腿支架20)绕轴线相对旋转。
74.在本实施方式中,使用者的小腿的最大伸展时的所述小腿支架40的绕支具侧枢支轴线x的摆动位置设为所述小腿支架40相对于所述大腿支架20绕支具侧枢支轴线x向前方侧的摆动端。
75.详细而言,如图3所示,所述小腿支架40的上端面(与所述大腿支架20相对的端面)设为随着绕支具侧枢支轴线x从一方侧去向另一方侧而距支具侧枢支轴线x的径向距离增大这样的倾斜面,所述大腿支架20的下端面25(与所述小腿支架40相对的端面)设为与所述小腿支架40的上端面45对应的倾斜面。
76.通过该结构,在小腿最大伸展时,所述小腿支架40仅容许相对于所述大腿支架20绕支具侧枢支轴线x向一方侧(使用者的小腿相对于大腿弯曲的方向)的转动,禁止向另一方侧(使用者的小腿相对于大腿伸展的方向)的转动。
77.在本实施方式中,如图1~图4所示,所述膝踝足支具1还具有用于禁止所述小腿支架40相对于所述大腿支架20绕支具侧枢支轴线x向双向的转动的锁定构件70。
78.所述锁定构件70构成为能够取锁定状态(图2所示的状态)和解除状态,在所述锁定状态下,围绕所述大腿支架20及所述小腿支架40将两支架20、40连结而防止所述小腿支架40相对于所述大腿支架20绕支具侧枢支轴线x相对旋转,在所述解除状态下,解除所述大腿支架20与所述小腿支架40的连结而容许所述小腿支架40相对于所述大腿支架20绕支具侧枢支轴线x相对旋转。
79.此外,在本实施方式中,所述锁定构件70具有对所述第1大腿支架20(1)及所述第1小腿支架40(1)进行作用的第1锁定构件70(1)和对所述第2大腿支架20(2)及所述第2小腿
支架40(2)进行作用的第2锁定构件70(2)。
80.在本实施方式中,如图1所示,所述膝踝足支具1还具有使用者载置脚的脚支架60。
81.在该情况下,所述小腿支架40的下端部连结于所述脚支架60。
82.以下,对本实施方式的步行动作辅助装置100进行说明。
83.图5示出从使用者宽度方向内侧且前方观察所述步行动作辅助装置100安装于左腿用的所述膝踝足支具1的状态的立体图。
84.另外,图6示出从安装面侧观察所述步行动作辅助装置100的分解立体图。
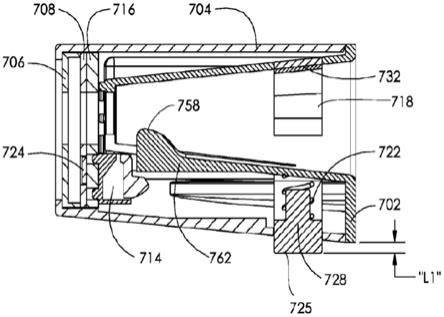
85.而且,图7及图8分别示出从使用者宽度方向外侧且前方观察所述步行动作辅助装置100及所述膝踝足支具1的分解立体图及分解纵向剖视图。
86.如图5~图8所示,所述步行动作辅助装置100具备以能够装卸的方式与所述膝踝足支具1连结的壳体110、收容于所述壳体110并输出针对小腿的步行辅助力的致动器、由所述致动器工作地驱动而摆动的驱动臂150、检测一个步行周期中的步行动作状态的步行动作状态检测传感器170、以及进行所述致动器的工作控制的控制装置500。
87.所述壳体110具有支承所述致动器的支架115和围绕所述支架115及所述致动器的罩120。
88.所述支架115具有在所述壳体110安装于所述膝踝足支具1的状态下大致在上下方向上延伸的上下方向延伸壁117、以及从所述上下方向延伸壁117大致水平地延伸的水平方向延伸壁119。
89.所述罩120具有:下罩122,所述下罩122形成与所述第1大腿支架20(1)相对的安装面112;和上罩125,所述上罩125以能够装卸的方式与所述下罩122连结并与所述下罩122协作而形成收容所述支架115及所述致动器的收容空间。
90.在本实施方式中,通过所述上下方向延伸壁117利用螺栓等紧固连结构件连结于所述下罩122的内表面,从而所述支架115固定于所述罩120的收容空间内。
91.此外,在本实施方式中,所述上罩125具有与所述下罩122能够装卸地连结的第1上罩125a和与所述第1上罩125a能够装卸地连结的第2上罩125b。
92.在本实施方式中,作为所述致动器,采用了电动马达130。
93.如图6所示,所述电动马达130具有马达主体132和与所述马达主体132连结的输出轴135,并构成为能够从所述输出轴135输出绕轴线向一方侧的第1方向及绕轴线向另一方侧的第2方向这双向的旋转动力。
94.在本实施方式中,所述马达主体132在载置于所述水平方向延伸壁119的状态下被支承于所述支架115,所述输出轴135比所述水平方向延伸壁119向下方延伸。
95.如图6及图7所示,本实施方式的所述步行动作辅助装置100还具有电池等所述电动马达130的动力源190。
96.所述动力源190以位于所述电动马达130的上方的方式被支承于所述上下方向延伸壁117。
97.所述驱动臂150与所述输出轴135工作连结,并根据所述输出轴135的第1及第2方向的旋转输出,而绕驱动侧枢支轴线y向一方侧的第1方向及另一方侧的第2方向摆动。
98.如图8所示,在本实施方式中,所述驱动臂150经由传动齿轮机构140与所述输出轴135工作连结。
99.所述传动齿轮机构140具有以不能相对旋转的方式被支承于所述输出轴135的驱动侧锥齿轮142和以与所述驱动侧锥齿轮142啮合的状态配置在驱动侧枢支轴线y上的从动侧锥齿轮144。
100.所述从动侧锥齿轮144在使用者宽度方向w上配置于比所述输出轴135接近所述膝踝足支具1的一侧。
101.并且,所述驱动臂150的基端部与所述从动侧锥齿轮144连结,由此,根据所述输出轴135的输出来使所述驱动臂150绕驱动侧枢支轴线y摆动。
102.此外,如图8所示,在所述下罩122设置有接触(英文:access)开口123,所述从动侧锥齿轮144及所述驱动臂150的基端部经由所述接触开口123而连结。
103.所述驱动臂150的顶端部在使所述步行动作辅助装置100安装于所述膝踝足支具1的状态下与所述第1小腿支架40(1)工作连结,并根据所述驱动臂150的绕驱动侧枢支轴线y的摆动来绕支具侧枢支轴线x推动所述第1小腿支架40(1)。
104.本实施方式的所述步行动作辅助装置100还具有检测所述驱动臂150的摆动位置的旋转传感器160。
105.详细而言,如图8所示,在所述从动侧锥齿轮144,以不能绕驱动侧枢支轴线y相对旋转的方式连结有被检测轴146,所述旋转传感器160配置成检测所述被检测轴146绕轴线的旋转角度。
106.所述步行动作辅助装置100在上部、下部及上下中间部这3个部位装卸自如地安装于所述膝踝足支具1。
107.详细而言,如图6所示,所述步行动作辅助装置100具有上部连结机构220、下部连结机构260及中间连结机构250。
108.如图8所示,所述中间连结机构250具有设置于所述膝踝足支具1的球头销251、以及设置于所述步行动作辅助装置100并供所述球头销251球接(英文:ball joint)的收容凹部258。
109.如图8所示,所述球头销251具有与所述膝踝足支具1的支具侧枢支轴线x同轴地立起设置并朝向所述步行动作辅助装置100延伸的轴部252、以及设置于所述轴部252的顶端部的球头部255。
110.在本实施方式中,所述球头销251利用所述支具侧连结件51而立起设置于所述膝踝足支具1。
111.详细而言,如图4及图8所示,所述球头销251通过代替所述支具侧连结件51中的所述内螺纹构件52及所述外螺纹构件55中的位于使用者宽度方向外侧处的外侧螺纹构件(在本实施方式中为所述外螺纹构件55)而与所述内螺纹构件52及所述外螺纹构件55中的位于使用者宽度方向内侧处的内侧螺纹构件(在本实施方式中为所述内螺纹构件52)螺纹连结而立起设置于所述膝踝足支具1。
112.所述球头销251与所述内侧螺纹构件的螺纹连结能够通过各种结构来呈现。
113.例如,能够在所述球头销251形成在轴线方向上贯通的带台阶的轴线孔。所述带台阶的轴线孔具有在所述球头部255所在的一侧开口的大径孔、在轴线方向上向与所述球头部相反的一侧开口的小径孔、以及将所述大径孔及所述小径孔相连的台阶部。并且,能够经由插通于所述带台阶的轴线孔且与所述内侧螺纹构件螺纹连结的螺栓等紧固连结构件而
使所述球头销251与所述内侧螺纹构件连结。
114.根据该结构,能够容易地使所述球头销251与支具侧枢支轴线x同轴地立起设置于现有的膝踝足支具1。
115.在本实施方式中,如图8所示,所述收容凹部258形成于所述驱动臂150的基端部。
116.根据该结构,能够实现所述步行动作辅助装置100的使用者宽度方向上的小型化,并且使支具侧枢支轴线x及驱动侧枢支轴线y可靠地位于同轴上。
117.如图6所示,所述上部连结机构220具备以向使用者宽度方向内侧延伸的方式设置于所述安装面112的上部转动轴222、以及以能够绕轴线转动的方式被支承于所述上部转动轴222的上部紧固连结构件225。
118.所述上部紧固连结构件225具有被支承于所述上部转动轴222的轴承部227和从所述轴承部227向径向外侧延伸的凸轮部229。
119.所述凸轮部229构成为,外周面与所述上部转动轴222的轴线之间的径向距离随着绕所述上部转动轴222的轴线去向一方侧而变长。
120.所述上部连结机构220还具备在如下位置设置于所述安装面112的上部承受构件246,该位置是从所述上部转动轴222在使用者前后方向上离开了在与所述上部转动轴222之间能够供所述第1大腿支架20(1)介于之间的距离的位置。
121.在本实施方式中,所述上部连结机构220具备以从所述安装面112向使用者宽度方向内侧延伸的方式设置的上部承受轴247,被支承于所述上部承受轴247的弹性辊248作为所述上部承受构件246发挥作用。
122.通过在所述上部紧固连结构件225绕所述上部转动轴222位于释放位置的状态下,使所述步行动作辅助装置100向接近所述膝踝足支具1的方向移动,从而能够使所述第1大腿支架20(1)位于所述上部紧固连结构件225与所述上部承受构件246之间的空间内,且通过在所述第1大腿支架20(1)位于所述空间内的状态下使所述步行动作辅助装置100a向离开所述膝踝足支具1的方向移动,从而能够使所述第1大腿支架20(1)从所述空间退出。
123.而且,当在所述第1大腿支架20(1)位于所述空间内的状态下使所述上部紧固连结构件225绕所述上部转动轴222从释放位置向紧固连结位置转动时,所述凸轮部229与所述上部承受构件246协作而在使用者前后方向上夹持所述第1大腿支架20(1),由此,呈现所述步行动作辅助装置100的上部与所述第1大腿支架20(1)连结的状态。
124.如图6所示,在本实施方式中,所述上部紧固连结构件225还具有从所述轴承部227向径向外侧延伸的操作臂230。
125.所述操作臂230构成为,自由端与所述上部转动轴222的轴线之间的径向长度比所述凸轮部229的径向最外端与所述上部转动轴222的轴线之间的径向长度大。
126.根据该结构,能够经由所述操作臂230使所述上部紧固连结构件225绕所述上部转动轴222容易地转动,并且在向所述第1大腿支架20(1)及所述步行动作辅助装置100的上部附加了违背意愿的外力的情况下,能够有效地防止所述上部紧固连结构件225经由所述凸轮部229绕所述上部转动轴222转动而解除所述步行动作辅助装置100的上部及所述第1大腿支架20(1)的连结状态的情形。
127.另外,如图6所示,在本实施方式中,所述上部紧固连结构件225在比所述凸轮部229靠使用者宽度方向内侧的位置具有从所述轴承部227向径向外侧延伸的卡合臂232。
128.所述卡合臂232以位于比位于所述上部紧固连结构件225及所述上部承受构件246之间的空间内的状态的所述第1大腿支架20(1)靠使用者宽度方向内侧的位置的方式设置于所述上部紧固连结构件225。
129.在所述卡合臂232设置有卡合槽233,所述卡合槽233在所述上部紧固连结构件225绕所述上部转动轴222被从释放位置向紧固连结位置转动操作且所述凸轮部229与所述上部承受构件246协作而在使用者前后方向上夹持所述第1大腿支架20(1)的状态下,与所述上部承受轴247中的比所述上部承受构件246向使用者宽度方向内侧延伸的部位卡合,通过使所述上部承受轴247的内侧延伸部位卡入于所述卡合槽233,从而能够防止所述步行动作辅助装置100的上部及所述第1大腿支架20(1)的违背意愿的沿使用者宽度方向的相对移动。
130.接着,对所述下部连结机构260进行说明。
131.如图5~图8所示,在本实施方式中,在所述驱动臂150的顶端部设置有能够绕沿着使用者前后方向的转动轴205摆动的摆动构件200,所述下部连结机构260设置于所述摆动构件200。
132.通过具备这样的结构,能够适当地调整所述上部连结机构220及所述中间连结机构250与所述下部连结机构260在使用者宽度方向上的相对位置,能够以适当的状态将所述步行动作辅助装置100安装于与使用者的体格相应地定制的各种形状的膝踝足支具1。
133.即,所述膝踝足支具1与使用者的体格相匹配地定制,所述第1大腿支架20(1)相对于所述第1小腿支架40(1)的使用者宽度方向w(参照图1)上的倾斜角度和/或弯曲形状按每个膝踝足支具1而不同。
134.关于这一点,通过使所述摆动构件200以能够在使用者宽度方向上摆动的方式与所述驱动臂150的顶端部连结,并在所述摆动构件200设置所述下部连结机构260,从而能够将所述步行动作辅助装置100适当地安装于所述第1大腿支架20(1)相对于所述第1小腿支架40(1)的使用者宽度方向w上的倾斜角度和/或弯曲形状不同的各种膝踝足支具1。
135.所述下部连结机构260具有与所述上部连结机构220实质上相同的结构。
136.具体而言,如图6所示,所述下部连结机构260具备以向使用者宽度方向内侧延伸的方式设置于所述摆动构件200的下部转动轴262、以及以能够绕轴线转动的方式被支承于所述下部转动轴262的下部紧固连结构件265。
137.所述下部紧固连结构件265具有被支承于所述下部转动轴262的轴承部(未图示)和从所述轴承部向径向外侧延伸的凸轮部(未图示)。
138.所述凸轮部构成为,外周面与所述下部转动轴262的轴线之间的径向距离随着绕所述下部转动轴262的轴线去向一方侧而变长。
139.如图6所示,所述下部连结机构260还具备在如下位置被支承于所述摆动构件200的下部承受构件286,所述位置是从所述下部转动轴262在使用者前后方向上离开了在与所述下部转动轴262之间能够供所述第1小腿支架40(1)介于之间的距离的位置。
140.在本实施方式中,所述下部连结机构260具备以向使用者宽度方向内侧延伸的方式设置于所述摆动构件200的下部承受轴287,被支承于所述下部承受轴287的弹性辊288作为所述下部承受构件286发挥作用。
141.通过在所述下部紧固连结构件265绕所述下部转动轴262位于释放位置的状态下,
使所述步行动作辅助装置100向接近所述膝踝足支具1的方向移动,从而能够使所述第1小腿支架40(1)位于所述下部紧固连结构件265与所述下部承受构件286之间的空间内,并且通过在所述第1小腿支架40(1)位于所述空间内的状态下使所述步行动作辅助装置100向离开所述膝踝足支具1的方向移动,能够使所述第1小腿支架40(1)从所述空间退出。
142.而且,当在所述第1小腿支架40(1)位于所述空间内的状态下使所述下部紧固连结构件265绕所述下部转动轴262从释放位置向紧固连结位置转动操作时,所述凸轮部与所述下部承受构件286协作而在使用者前后方向上夹持所述第1小腿支架40(1),由此,呈现所述步行动作辅助装置100的下部与所述第1小腿支架40(1)连结的状态。
143.如图6所示,在本实施方式中,所述下部紧固连结构件265还具有从所述轴承部向径向外侧延伸的操作臂270。
144.所述操作臂270构成为,自由端与所述下部转动轴262的轴线之间的径向长度比所述凸轮部269的径向最外端与所述下部转动轴262的轴线之间的径向长度大。
145.根据该结构,能够经由所述操作臂270使所述下部紧固连结构件265绕所述下部转动轴262容易地转动,并且在向所述第1小腿支架40(1)及所述步行动作辅助装置100的下部附加了违背意愿的外力的情况下,能够有效地防止所述下部紧固连结构件265经由所述凸轮部绕所述下部转动轴262转动而解除所述步行动作辅助装置100的下部及所述第1小腿支架40(1)的连结状态的情形。
146.另外,如图6所示,在本实施方式中,所述下部紧固连结构件265在比所述凸轮部269靠使用者宽度方向内侧的位置具有从所述轴承部267向径向外侧延伸的卡合臂272。
147.所述卡合臂272以位于比位于所述下部紧固连结构件265及所述下部承受构件286之间的空间内的状态的所述第1小腿支架40(1)靠使用者宽度方向内侧的位置的方式设置于所述下部紧固连结构件265。
148.在所述卡合臂272设置有卡合槽273,所述卡合槽273在所述下部紧固连结构件265绕所述下部转动轴262被从释放位置向紧固连结位置转动操作且所述凸轮部与所述下部承受构件286协作而在使用者前后方向上夹持所述第1小腿支架40(1)的状态下,与所述下部承受轴287中的比所述下部承受构件286向使用者宽度方向内侧延伸的部位卡合,通过使所述下部承受轴287的内侧延伸部位卡入于所述卡合槽273,从而能够防止所述步行动作辅助装置100的下部及所述第1小腿支架40(1)的违背意愿的沿使用者宽度方向的相对移动。
149.接着,对所述步行动作辅助装置100的控制构造进行说明。
150.图9示出所述步行动作辅助装置100的控制框图。
151.所述步行动作辅助装置100构成为,作为所述步行动作状态检测传感器170而具有大腿姿势检测单元510,所述控制装置500基于大腿相位角φ来识别步行周期中的步行状态(周期步行动作定时),进行所述电动马达130的工作控制以使得所述电动马达130向小腿赋予与该步行状态相应的步行辅助力。
152.即,所述步行动作辅助装置100构成为,不检测作为赋予辅助力的部位的小腿而是检测作为与小腿不同的部位的大腿的动作,基于该大腿的动作识别步行周期中的步行状态,对作为辅助力赋予对象部位的小腿赋予与该步行状态相应的步行辅助力。
153.具体而言,所述大腿姿势检测单元510能够在每个采样定时检测与作为使用者的大腿的前后摆动角度的髋关节角度关联的角度关联信号。
154.在此基础上,如图9所示,所述步行动作辅助装置100具备基于所述角度关联信号算出大腿相位角φ的大腿相位角算出单元550、算出在基于所述大腿相位角φ而识别出的步行状态下应输出的转矩值的辅助转矩算出单元570、以及进行所述致动器的工作控制的工作控制单元580。
155.如图9所示,本实施方式的步行动作辅助装置100具有步行动作定时算出单元560,该步行动作定时算出单元560基于大腿相位角φ,算出该大腿相位角φ相当于一个步行周期中的哪个步行状态(即,用相对于步行周期的百分率规定的步行动作定时),所述辅助转矩算出单元570构成为基于步行动作定时算出应输出的辅助力的转矩值。
156.所述辅助转矩算出单元570构成为,具有规定了一个步行周期中的周期步行动作定时与应输出的转矩值的关系的输出转矩模式,将由所述步行动作定时算出单元560算出的周期步行动作定时应用于所述输出转矩模式来算出应输出的转矩值。
157.如图9所示,在本实施方式的所述步行动作辅助装置100中,所述控制装置500作为所述大腿相位角算出单元550、所述步行动作定时算出单元560、所述辅助转矩算出单元570及所述工作控制单元580发挥作用。
158.即,所述控制装置500具有:运算部,所述运算部包括基于从所述大腿姿势检测单元510、人为操作构件等输入的信号来执行运算处理的控制运算单元;以及存储部,所述存储部包括存储控制程序、控制数据等的rom、以即使切断电源也不会丢失的状态保存设定值等且能够改写所述设定值等的非易失性存储单元及将在由所述运算部进行的运算中生成的数据暂时地进行保持的ram等。
159.所述大腿姿势检测单元510在一个步行周期中按每个预先确定的预定采样定时检测所述角度关联信号。
160.所述大腿姿势检测单元510只要能够直接或间接地检测大腿的前后摆动角度(髋关节角度θ)即可,可以具有陀螺仪传感器、加速度传感器、旋转编码器、以及测定肌肉电流、肌肉的硬度的传感器等各种方式。
161.在本实施方式的所述步行动作辅助装置100中,所述大腿姿势检测单元510具有能够检测大腿的前后摆动角速度的3轴角速度传感器(陀螺仪传感器)511(参照图9),所述大腿相位角算出单元550构成为通过对由所述3轴角速度传感器511检测出的大腿的角速度进行积分,从而算出作为大腿的前后摆动角度的髋关节角度θ。
162.此外,本实施方式的步行动作辅助装置100具有3轴加速度传感器515,所述大腿相位角算出单元550构成为基于在静止时由所述3轴加速度传感器515检测出的检测值,算出以使用者的体轴(铅垂轴)为基准的髋关节角度(大腿的前后摆动角度)。
163.取而代之,也可以构成为不具有所述3轴加速度传感器515。
164.在该情况下,由所述大腿相位角算出单元550算出的髋关节角度θ(大腿的前后摆动角度)成为以所述步行动作辅助装置100的主电源被接通的时间点为基准的大腿前后摆动角度。
165.因此,在该情况下,所述大腿相位角算出单元550能够使用高通滤波器,以使得髋关节角度θ(大腿的前后摆动角度)的基准成为该大腿前后摆动角度的中央值的方式进行修正。
166.或者,所述大腿相位角算出单元550能够代替使用高通滤波器,而是检测所算出的
髋关节角度θ(大腿的前后摆动角度)的正方向最大值与负方向最大值之间的偏差,并基于所述偏差以使得髋关节角度θ(大腿的前后摆动角度)的基准成为该大腿前后摆动角度的中央值的方式进行修正。
167.也可以利用旋转编码器检测大腿相对于体轴的前后摆动角度,将该检测值用作髋关节角度θ,但在本实施方式中,通过基于由所述3轴角速度传感器511检测出的角速度来算出髋关节角度,从而提高所述步行动作辅助装置100的设计自由度。
168.即,在利用旋转编码器检测髋关节角度θ(相对于体轴的大腿前后摆动角度)的情况下,需要检测固定于躯干的躯干侧检测件和以与大腿一体地摆动的方式固定于大腿的大腿侧检测件的相对移动角度,因此需要以使所述固体侧检测件及所述大腿侧检测件分别相对于躯干及大腿不发生位置偏移的方式安装所述两检测件。
169.相对于此,根据基于由所述3轴角速度传感器511检测出的角速度来算出髋关节角度θ的方法,不会受到上述那样的限制,能够提高所述步行动作辅助装置100的设计自由度。
170.如上所述,在本实施方式的步行动作辅助装置100中,所述大腿姿势检测单元510除了所述3轴角速度传感器511以外,还具有3轴加速度传感器515。
171.在该情况下,所述大腿相位角算出单元550构成为,将基于来自所述3轴角速度传感器511的角速度数据而算出的第1欧拉角的高频成分和基于来自所述3轴加速度传感器515的加速度数据而算出的第2欧拉角的低频成分合计而算出合计欧拉角,并基于根据所述合计欧拉角算出的髋关节角度θ和根据所述髋关节角度θ算出的髋关节角速度ω,算出大腿相位角φ。
172.详细而言,如图9所示,所述大腿相位角算出单元550按每个采样定时从所述3轴角速度传感器511输入以传感器坐标轴为基准的角速度数据,使用预定的变换式将所述角速度数据变换为表示传感器坐标轴与全局坐标轴(以铅垂方向为基准的空间坐标轴)之间的相关性的角速度数据(欧拉角速度)。
173.并且,所述大腿相位角算出单元550通过对所述角速度数据(欧拉角速度)进行积分来算出所述第1欧拉角。
174.优选的是,所述大腿相位角算出单元500使用在静止时从所述3轴角速度传感器511输入的角速度数据,按每个预定采样定时进行从所述3轴角速度传感器511输入的以传感器坐标轴为基准的角速度数据的漂移去除。
175.另外,所述大腿相位角算出单元550按每个采样定时从所述3轴加速度传感器515经由低通滤波器520输入以传感器轴为基准的加速度数据,基于在静止时输入的加速度数据和重力加速度,根据经由所述低通滤波器520输入的所述加速度数据,算出表示传感器坐标轴与全局坐标轴(以铅垂方向为基准的空间坐标轴)的相关性的所述第2欧拉角。
176.并且,所述大腿相位角算出单元550根据将经由高通滤波器530得到的所述第1欧拉角的高频成分和经由低通滤波器535得到的所述第2欧拉角的低频成分合计而得到的所述合计欧拉角及表示大腿的朝向的单位向量,算出髋关节角度θ。
177.优选的是,所述大腿相位角算出单元550基于来自所述加速度传感器515的加速度数据来检测脚后跟着地,通过在检测脚后跟着地时将根据来自所述3轴角速度传感器511的角速度数据算出的修正欧拉角与所述合计欧拉角相加,从而能够实现漂移去除。
178.大腿相位角φ通过下述算法算出。
179.所述大腿相位角算出单元550按每个采样定时算出髋关节角度θ,并且对其进行微分来算出髋关节角速度ω。
180.例如,所述大腿相位角算出单元550在算出从步行周期基准定时起第k个采样定时s(k)(k为1以上的整数)下的髋关节角度θ(k)时,对其进行微分来算出该采样定时s(k)下的髋关节角速度ω(k)。
181.所述步行周期基准定时可以设为例如脚后跟着地或从脚后跟着地起经过预定时间后的定时。
182.脚后跟着地的定时能够通过各种方法来识别。
183.例如,能够构成为,在将以使用者的体轴(铅垂轴)为基准而使大腿朝向前方侧及后方侧摆动时的髋关节角速度ω分别设为正及负的情况下,将从所算出的髋关节角速度ω从正值转变为零的定时起行进了预定相位角δα的时间点识别为脚后跟着地时间点。
184.取而代之,也可以在所述步行动作辅助装置100中具备检测脚后跟着地的脚后跟着地检测单元,所述大腿相位角检测单元550将由所述脚后跟着地检测单元检测出的定时识别为脚后跟着地时间点。所述脚后跟着地检测单元例如可以是能够检测脚后跟的接地的压力传感器。
185.而且,如本实施方式的步行动作辅助装置100那样,在具备所述加速度传感器515的情况下,能够将所述加速度传感器515兼用作所述脚后跟着地检测单元。
186.并且,所述大腿相位角算出单元550基于所述采样定时s(k)下的髋关节角度θ(k)及髋关节角速度ω(k),算出所述采样定时s(k)下的大腿相位角φ(k)(=-arctan(ω(k)/θ(k)) π)。
187.在本实施方式中,所述大腿相位角算出单元550构成为,代替髋关节角度θ(k)及髋关节角速度ω(k)而使用正规化髋关节角度θa(k)及正规化髋关节角速度ωa(k)来进行大腿相位角φ(k)的算出,但在以下,为了容易理解大腿相位角φ(k)的算出算法,首先,对使用髋关节角度θ(k)及髋关节角速度ω(k)来算出大腿相位角φ(k)的构成进行说明,关于正规化髋关节角度θa(k)及正规化髋关节角速度ωa(k)在后面叙述。
188.图10示意性地示出通过将由髋关节角度θ及髋关节角速度ω划定的大腿相位角φ(步行状态)遍及一个步行周期地标绘而得到的轨迹线图。
189.如图10所示,由髋关节角度θ及髋关节角速度ω划定的大腿相位角φ在一个步行周期中在0~2π之间变化。
190.详细而言,在将大腿位于比使用者的沿着铅垂方向的体轴靠前方及后方处的状态下的髋关节角度θ分别设为“正”及“负”,并将大腿朝向前方及后方摆动的状态下的髋关节角速度ω分别设为“正”及“负”的情况下,当将髋关节角度θ在“负”的方向上成为最大且髋关节角速度ω为“零”的状态下的大腿相位角φ设为0时,在从大腿向后方侧最大摆动的状态(髋关节角度θ在“负”的方向上成为最大且髋关节角速度ω为“零”的状态、图10中的采样定时s(1))起到大腿以抬腿状态相对地向前方侧移动而与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“正”的方向上成为最大的状态)为止的期间(图10的步行区域a1)中,大腿相位角φ从0向π/2变化。
191.接着,在从提起的抬腿状态的大腿与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“正”的方向上成为最大的状态)起到进一步相对地向前方侧最大
摆动的状态(髋关节角度θ在“正”的方向上成为最大且髋关节角速度ω为“零”的状态)为止的期间(图10的步行区域a2)中,大腿相位角φ从π/2向π变化。
192.并且,在从抬腿状态的大腿向前方侧最大摆动的状态(髋关节角度θ在“正”的方向上成为最大且髋关节角速度ω为“零”的状态)起到经由脚后跟着地而接地而成为立腿状态且该立腿状态的大腿相对地向后方侧摆动而与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“负”的方向上成为最大的状态)为止的期间(图10的步行区域a3)中,大腿相位角φ从相位角π向3π/2变化。
193.而且,在从立腿状态的大腿与使用者的体轴一致的状态(髋关节角度θ为“零”且髋关节角速度ω在“负”的方向上成为最大的状态)起到相对地向后方侧摆动而向后方侧最大摆动的状态(髋关节角度在“负”的方向上成为最大且髋关节角速度为“零”的状态)为止的期间(图10的步行区域a4)中,大腿相位角φ从3π/2向2π变化。
194.所述步行动作定时算出单元560具有将大腿相位角φ变换为作为相对于步行周期的百分率的周期步行动作定时的变换函数,将从所述大腿相位角算出单元550发送来的采样定时s(k)下的大腿相位角φ(k)应用于所述变换函数,算出所述采样定时s(k)相当于步行周期中的哪个周期步行动作定时t(k)(即,在将一个步行周期设为100%的情况下,大腿相位角φ(k)相当于哪个周期步行动作定时t(k))。
195.在此,所述周期步行动作定时t(k)通过
196.t(k)=(φ(k)/2π)
×
100(%)
197.算出。
198.所述辅助转矩算出单元570具有规定了周期步行动作定时与应输出的转矩值的关系的输出转矩模式,将从所述步行动作定时算出单元560发送来的周期步行动作定时应用于所述输出转矩模式,算出在该采样定时s(k)下应输出的转矩值p(k)。
199.所述输出转矩模式按每个使用者制作,并预先存储于所述辅助转矩算出单元570。
200.所述工作控制单元580执行所述致动器(所述电动马达130)的工作控制,以使得所述致动器(所述电动马达130)输出由所述辅助转矩算出单元570算出的转矩值的辅助力。
201.这样,本实施方式的步行动作辅助装置100构成为,基于与作为步行辅助力的赋予对象部位的小腿不同的大腿的相位角(大腿相位角φ)来掌握步行周期中的步行状态(周期步行动作定时),并对小腿输出与所述步行状态相应的辅助力。
202.因此,与基于在步行时进行复杂的动作的小腿的动作来识别步行状态(周期步行动作定时)的结构相比,能够准确地识别步行状态,能够输出与步行状态相应的辅助力。
203.另外,本实施方式的步行动作辅助装置100构成为,将大腿相位角φ应用于在该时间点下存储着的相位模式函数,算出步行状态(周期步行动作定时)。
204.因此,即使在步行周期中产生不规则的步行动作,也能够输出修正后的状态的辅助力。
205.另外,在本实施方式的步行动作辅助装置100中,所述大腿相位角算出单元550仅在由髋关节角度θ及髋关节角速度ω划定的轨迹线图上的标绘点的向量长度超过预定的阈值的情况下,算出基于髋关节角度θ及髋关节角速度ω的大腿相位角φ,将大腿相位角φ向所述步行动作定时算出单元发送,另一方面,在所述向量长度为预定的阈值以下的情况下,输出致动器工作禁止信号。
206.因此,在穿戴了所述步行动作辅助装置100的使用者违背意愿地发生了姿势变动的情况下,能够有效地防止虽然未开始步行动作但所述致动器(所述电动马达130)输出步行辅助力的情况。
207.而且,如上所述,本实施方式的步行动作辅助装置100构成为,在基于大腿相位角φ识别出一个步行周期中的步行状态的基础上,利用所述致动器(所述电动马达130)对小腿赋予步行辅助力。
208.因此,对于由于中风等而有偏瘫的使用者,也能够提供准确的步行辅助力。
209.即,以利用电动马达等致动器赋予步行辅助力的方式构成的以往的步行辅助装置构成为,检测由所述致动器赋予辅助力的控制对象部位的动作,基于其检测结果进行所述致动器的工作控制。
210.例如,在对大腿供给步行辅助力的以往的步行辅助装置中,基于大腿的动作的检测结果,进行对大腿赋予步行辅助力的致动器的工作控制。
211.另外,在对小腿供给步行辅助力的以往的步行辅助装置中,基于小腿的动作的检测结果,进行对小腿赋予步行辅助力的致动器的工作控制。
212.然而,在是由于中风等而有偏瘫的患者的情况下,虽然大腿的步行动作(绕髋关节的前后摆动动作)能够比较正常地进行,但大多无法正常地进行小腿的步行动作(绕膝关节的前后摆动动作)。
213.当欲对这样的患者赋予向小腿的步行辅助力时,在所述以往的步行辅助装置中,基于无法进行正常的步行动作的小腿的动作来进行对小腿提供步行辅助力的致动器的工作控制,有可能无法提供准确的步行辅助力。
214.相对于此,如上所述,本实施方式的所述步行动作辅助装置100构成为基于大腿相位角φ来进行对小腿赋予步行辅助力的所述致动器(所述电动马达130)的工作控制。
215.因此,即使在使用者由于中风等而有偏瘫的情况下,也能够对小腿供给准确的步行辅助力。
216.在此,对所述正规化髋关节角度θa(k)及所述正规化髋关节角速度ωa(k)进行说明。
217.如上所述,在本实施方式中,所述大腿相位角算出单元550构成为,在算出所述大腿相位角φ(k)时,使用所述正规化髋关节角度θa(k)及所述正规化髋关节角速度ωa(k),来代替基于来自所述大腿姿势检测单元510的角度关联信号而算出的髋关节角度θ(k)(以下也适当地称为未正规化髋关节角度θ(k))及对所述未正规化髋关节角度θ(k)进行微分而得到的髋关节角速度ω(k)(以下也适当地称为未正规化髋关节角速度ω(k))。
218.详细而言,所述大腿相位角算出单元550将未正规化髋关节角度θ(k)除以所存储的髋关节角度用正规化系数a来算出所述正规化髋关节角度θa(k),并且将未正规化髋关节角速度ω(k)除以所存储的髋关节角速度用正规化系数b来算出所述正规化髋关节角速度ωa(k),使用所述正规化髋关节角度θa(k)及所述正规化髋关节角速度ωa(k)来算出大腿相位角φ(k)(=-arctan(ωa(k)/θa(k)) π)。
219.根据该结构,能够准确地识别步行周期中的步行状态(周期步行动作定时)。
220.即,在图10中,为了容易理解,在使髋关节角度θ的标度(振幅)与髋关节角速度ω的标度(振幅)一致的状态下示意性地示出大腿相位角φ的轨迹线图,但实际上,髋关节角
度θ的标度(振幅)与髋关节角速度ω的标度(振幅)不一致,两者按每个使用者而不同,更严格地说,即使在同一使用者中也可能根据步行周期而不同。
221.图11示出一个使用者在某一步行周期中的轨迹线图的示意图。
222.在图11所示的例子中,髋关节角速度ω的标度(振幅)成为髋关节角度θ的标度(振幅)的约2倍。
223.此外,图10及图11中的s(1)是髋关节角度θ在“负”的方向上成为最大且髋关节角速度ω为“零”时的采样定时,采样定时s(2)~s(12)是接续在采样定时s(1)之后的采样定时。
224.另外,大腿相位角φ(2)~φ(12)分别是基于采样定时s(2)~s(12)下的测定值得到的大腿相位角。
225.从图10及图11的比较可知,图11与图10相比,在髋关节角度θ的绝对值大的区域(例如,采样定时s(1)~s(3))中,大腿相位角φ相对于时间经过的变化比例(即,一个采样定时与下一个采样定时之间的大腿相位角φ的偏差)大,另一方面,在髋关节角度θ的绝对值小的区域(例如,采样定时s(7)~采样定时s(12))中,大腿相位角φ相对于时间经过的移位比例小。
226.如上所述,在用使用相对于步行周期的百分率而规定的步行动作定时(周期步行动作定时t(k))来表示采样定时s(k)下的大腿相位角φ(k)时,
227.t(k)=(φ(k)/2π)
×
100(%)。
228.因此,当髋关节角度θ的标度(振幅)与髋关节角速度ω的标度(振幅)不同时,基于大腿相位角φ算出的周期步行动作定时的变化比例根据一个步行周期中的大腿的摆动位置(即,髋关节角度θ的绝对值的大小)而大幅变动,结果,无法准确地识别周期步行动作定时,难以准确地得到所述致动器应输出的转矩值。
229.考虑这一点,在本实施方式中,将未正规化髋关节角度θ(k)除以髋关节角度用正规化系数a来算出正规化髋关节角度θa(k),并且将对未正规化髋关节角度θ(k)进行微分而得到的未正规化髋关节角速度ω(k)除以髋关节角速度用正规化系数b来算出正规化髋关节角速度ωa(k),使用正规化髋关节角度θa(k)及正规化髋关节角速度ωa(k)来算出大腿相位角φ(k)(=-arctan(ωa(k)/θa(k)) π)。
230.根据该结构,能够防止或减少成为大腿相位角φ(k)的算出基础的髋关节角度θa(k)及髋关节角速度ωa(k)之间的标度(振幅)的差异,能够遍及步行周期而高精度地识别周期步行动作定时。
231.在本实施方式中,所述大腿相位角算出单元550构成为,将在预定期间内基于来自所述大腿姿势检测单元510的角度关联信号而得到的未正规化髋关节角度θ中的绝对值的最大值存储为所述髋关节角度用正规化系数a,并且将对在所述预定期间内得到的未正规化髋关节角度θ进行微分而算出的未正规化髋关节角速度ω中的绝对值的最大值存储为所述髋关节角速度用正规化系数b。
232.根据该结构,能够得到与按每个使用者而不同的步行的“癖好”相应的所述髋关节角度用正规化系数a及所述髋关节角速度用正规化系数b,能够提高周期步行动作定时的识别精度。
233.取而代之,也可以是,所述大腿相位角算出单元550以将预先输入的人为输入髋关
节角度及人为输入髋关节角速度分别存储为所述髋关节角度用正规化系数a及所述髋关节角速度用正规化系数b的方式进行变形。
234.在该变形例中,所述人为输入髋关节角度及所述人为输入髋关节角速度能够基于使用者的过去的步行数据而按每个使用者进行设定。
235.在所述变形例中,优选的是,所述大腿相位角算出单元550可以构成为,将在预定期间内基于来自所述大腿姿势检测单元510的角度关联信号而得到的未正规化髋关节角度θ中的绝对值的最大值覆写保存为所述髋关节角度用正规化系数a来代替所述人为输入髋关节角度,并且将对在所述预定期间内得到的未正规化髋关节角度θ进行微分而算出的未正规化髋关节角速度ω中的绝对值的最大值覆写保存为所述髋关节角速度用正规化系数b来代替所述人为输入髋关节角速度。
236.在本实施方式及所述变形例中,所述预定期间例如可以是最近完成的预定次数的步行周期、或者从该步行动作辅助装置100的主电源被接通的时间点到最近完成的步行周期为止的期间。
237.所述预定次数能够以1次以上的整数适当设定。
238.接着,对步行动作所需的步行辅助力进行说明。
239.图12示出以时间序列表示一个步行周期中的步行姿势的示意图。
240.如图12所示,一个步行周期包括:脚后跟着地期(迈出的脚接地的前后的期间)x1,所述脚后跟着地期x1包含在比使用者的体轴(铅垂轴)靠前方侧的位置使脚后跟接地的脚后跟着地时间点;立腿期(接地的小腿相对于身体相对地向后方移动的期间)x2,所述立腿期x2在脚后跟着地后使该脚后跟着地了的腿在接地的状态下向后方侧相对移动;抬腿期的初期阶段x3a,所述抬腿期的初期阶段x3a从立腿期x2的结束时间点起提起立腿着的腿的小腿;以及抬腿期的后期阶段x3b,所述抬腿期的后期阶段x3b使所提起的小腿向前方侧相对移动而向脚后跟着地引导。
241.步行辅助力包括将小腿相对于大腿向伸展方向推动的力和将小腿相对于大腿向弯曲方向推动的力,根据步行周期中的动作定时所需的步行辅助力的方向不同。
242.例如,在所述脚后跟着地期x1及立腿期x2中,需要使小腿绕膝关节向膝伸展方向转动而防止膝弯折的伸展方向的步行辅助力。
243.在抬腿期的初期阶段x3a中,需要使小腿绕膝关节向膝弯曲方向转动来对腿的提起进行辅助的弯曲方向的步行辅助力。
244.另外,在所述抬腿期的后期阶段x3b中,需要使小腿绕膝关节向膝伸展方向转动的步行辅助力。
245.并且,在所述4个阶段的哪个阶段或全部的阶段中需要步行辅助力、和/或、在必要的阶段中需要何种程度的大小的步行辅助力,根据每个使用者和/或使用者的恢复程度而不同。
246.鉴于这一点,根据每个使用者及使用者的每个恢复程度来设定所述输出转矩模式。
247.图13示出所述步行动作辅助装置100中的所述控制装置500的致动器工作控制模式的流程。
248.所述控制装置500根据起动信号输入而起动所述致动器工作控制模式。
249.起动信号例如根据使用者对起动按钮等人为操作构件的人为操作而被输入。
250.当所述致动器工作控制模式被起动时,所述大腿相位角算出单元550在步骤s11中判断预定次数的步行周期是否完成。
251.对在后述的步骤s18中算出的大腿相位角φ(k)返回到预先设定的步行周期基准角的次数进行计数,能够根据该计数次数是否达到预定次数来判断预定次数的步行周期是否完成。
252.在步骤s11为“是”的情况下,移向步骤s12,在步骤s11为“否”的情况下,绕过步骤s12而移向步骤s13。
253.在所述致动器工作控制模式刚起动后,在步骤s11中判定为“否”,并移向步骤s13。
254.此外,关于步骤s12在后面叙述。
255.在步骤s13中,所述大腿相位角算出单元550基于来自所述大腿姿势检测单元510的一个采样定时s(k)下的角度关联信号,算出该一个采样定时s(k)下的非正规化髋关节角度θ(k),在步骤s14中,基于未正规化髋关节角度θ(k)算出所述一个采样定时s(k)下的未正规化髋关节角速度ω(k)。
256.在步骤s15中,所述大腿相位角算出单元550将未正规化髋关节角度θ(k)除以所存储的髋关节角度用正规化系数a来算出采样定时s(k)下的正规化髋关节角度θa(k),并且将未正规化髋关节角速度除以所存储的髋关节角速度用正规化系数b来算出采样定时s(k)下的正规化髋关节角速度ωa(k)。
257.所述大腿相位角算出单元550在步骤16中,基于正规化髋关节角度θa(k)及正规化髋关节角速度ωa(k)来制作轨迹线图,在步骤s17中,判断轨迹线图上的标绘点的向量长度(标绘点与原点的距离)是否超过阈值。
258.在所述步骤s17为“否”的情况下,所述大腿相位角算出单元550判断为未开始步行动作,输出致动器工作禁止信号(步骤s25)。
259.在该情况下,所述致动器工作控制模式返回到步骤s11。
260.在所述步骤s17为“是”的情况下,所述大腿相位角算出单元550判断为正在进行步行动作,基于正规化髋关节角度θa(k)及正规化髋关节角速度ωa(k)算出大腿相位角φ(k),并发送给所述步行动作定时算出单元560(步骤s18)。
261.所述步行动作定时算出单元560根据来自所述大腿相位角算出单元550的大腿相位角φ(k)算出周期步行动作定时t(k),并发送给所述辅助转矩算出单元570(步骤s19)。
262.所述辅助转矩算出单元570将来自所述步行动作定时算出单元560的保存周期步行动作定时t(k)应用于存储的输出转矩模式,在该定时(采样定时s(k))下取得所述致动器应输出的步行辅助力的大小及方向,并发送给所述工作控制单元580(步骤s20)。
263.所述工作控制单元580进行所述致动器的工作控制以使得所述致动器输出由所述辅助转矩算出单元570算出的大小及方向的步行辅助力(步骤s21)。
264.在步骤s22中,所述控制装置500判断是否被输入了所述致动器工作控制模式的结束信号,在没有结束信号的输入的情况下返回到步骤s11,在被输入了结束信号的情况下结束该控制模式。
265.此外,结束信号例如根据使用者对结束按钮等人为操作构件的人为操作而被输入。
266.当从步骤s22返回到步骤s11时,所述大腿相位角算出单元550判定在所述步骤s18中计数出的步行周期的次数是否达到预定次数,在“是”的情况下移向步骤s12。
267.在步骤s12中,所述大腿相位角算出单元550将在预定次数的步行周期内基于来自所述大腿姿势检测单元510的角度信号而得到的未正规化髋关节角度θ中的绝对值的最大值覆写为所述髋关节角度用正规化系数a,并且将对在预定次数的步行周期内基于来自所述大腿姿势检测单元的角度信号而得到的未正规化髋关节角度θ进行微分而算出的未正规化髋关节角速度ω中的绝对值的最大值覆写为所述髋关节角速度用正规化系数b。
268.附图标记说明
269.100 步行动作辅助装置
270.130 电动马达(致动器)
271.510 大腿姿势检测单元
272.550 大腿相位角算出单元
273.560 步行动作定时算出单元
274.570 辅助转矩算出单元
275.580 工作控制单元
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。