1.本发明涉及自主车辆(尤其是电动或混合动力推进式的自主车辆)的照明的领域。
背景技术:
2.电动推进式或混合动力推进式的包括电动机的车辆的续航能力是一个重要标准,制造商一直致力于改善该重要标准。为了增加驾驶员的视觉舒适度和/或不同使用者的安全,目前市场上销售的车辆通常包括照明系统,所述照明系统良好地比现行的各种法规所要求的照明系统性能更好。增加的该性能必然表现为更高的电消耗和因此在电动或混合动力车辆的情况下的降低的续航能力。
技术实现要素:
3.本发明的目的在于通过提供一种能够增加车辆续航能力的照明管理方法来克服现有技术的缺陷(更具体地上文提及的缺陷),所述照明管理方法用于管理包括电动或混合动力推进系统的自主车辆的照明。
4.为此,本发明涉及一种管理方法,所述管理方法用于管理能够在自主驾驶模式中运行的机动车辆的照明,所述机动车辆在下文中称作主车辆(v
é
hicule),所述方法包括多个步骤,所述多个步骤旨在:
5.‑
当所述主车辆的车灯激活时,确定所述主车辆是否处在自主驾驶模式中;
6.‑
在自主驾驶模式中,降低所述主车辆的照明强度直到阈值,所述阈值小于手动驾驶所述车辆时所设置的照明强度。
7.由此,根据本发明的方法使得能够当车辆处在自主驾驶模式中时大大地限制所述车辆的照明强度。该降低不会损害驾驶员的利益,因为在自主驾驶模式中既不需要驾驶员的干预也不需要驾驶员的关注。照明强度的该降低表现为由于车辆照明系统的电消耗的降低,这导致了所述车辆的续航能力的增加。
8.在实施例中,所述阈值对应于由地方性法规(即所述主车辆所行驶在的地方的现行法规)规定的最小化照明强度。
9.在实施例中,所述阈值对应于由集合中最严格的法规规定的最小化照明强度,所述集合包括多个地理区域的法规,例如欧洲法规和美国法规。
10.在实施例中,当所述主车辆处在自主驾驶模式中时,并且当在所述主车辆后方检测到车辆时,不降低后车灯的照明强度。
11.在实施例中,前车灯和后车灯的照明强度降低。
12.本发明还涉及一种包括指令的电脑程序产品,当程序由电脑执行时,所述指令引导所述电脑实施如上文限定的方法的步骤
13.本发明还涉及一种自主驾驶系统,所述自主驾驶系统包括配置用于实施如上文限定的方法的计算机、至少一个传感器和致动器。
14.本发明还涉及一种机动车辆,所述机动车辆装配有如上文限定的并且/或者实施
如更上面限定的方法的自主驾驶系统。
15.在实施例中,所述机动车辆包括电动或混合动力电动推进系统。
附图说明
16.通过阅读下文中的详细说明和附图,将更好地理解本发明,在所述附图中:
17.‑
图1示出了装配有自主驾驶系统的车辆,所述自主驾驶系统能够实施根据本发明的方法。
18.‑
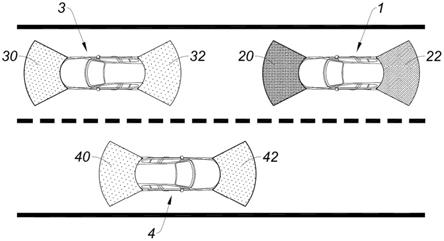
图2是示出了实施根据本发明的方法的自主车辆的示意图。
具体实施方式
19.图1示出了一种机动车辆,所述机动车辆能够实施自主驾驶模式,为此,所述机动车辆装配有自主驾驶系统2。在下文中,该车辆称作主车辆1。所述自主驾驶系统2尤其包括计算机10、致动器12以及分布在所述主车辆1的前部、后部和侧面上的多个传感器14a、14b、16a、16b、18。这些传感器可包括一个或多个以下传感器类型的传感器:超声波传感器、雷达传感器、激光雷达传感器、日视摄像机、夜视摄像机等。在示例中,自主驾驶系统2包括四个摄像机18(即一个前摄像机、一个后摄像机和两个侧向摄像机)以及超音波传感器和/或雷达传感器和/或激光雷达传感器类型的多个传感器14a、14b、16a、16b。所述计算机10接收由所有传感器14a、14b、16a、16b和所有摄像机18提供的数据。
20.由于所有这些传感器,所述计算机10能够检测在所述主车辆的环境中是否存在障碍物,尤其是在该环境中是否存在车辆,该车辆是处在所述主车辆1的当前车道上还是邻近车道上。
21.另外,所述计算机10与多个致动器12联接,所述多个致动器包括能够尤其是作用在加速器上和所述主车辆的制动系统上的装置,以便控制所述主车辆的速度(allure)。所述致动器12还包括能够作用在车辆的方向上的装置,以便控制所述车辆的轨迹。
22.所述自主驾驶系统构造用于实施根据本发明的方法。由此,当车辆处在自主驾驶模式中时,不再需要驾驶员的干预和关注。因此,可以降低由所述车辆的照明系统(未示出)提供的照明强度,而不打扰所述驾驶员(该驾驶员将更有可能忙于所述车辆上所设置的车载娱乐系统),所述照明强度由计算机10控制。降低所述照明强度直到阈值,该阈值对应于由(一个或多个)现行法规规定的最小化值。有利地,所述最小化值根据地方性法规(即所述主车辆1所行驶在的地方的现行法规,所述车辆经定位地理位置)来确定。替代地,所述最小化值可对应于由在不同的地理区域(例如欧洲和美国)中的现行法规确定的最小化值中的最大值。
23.图2示出了包括两个通行车道的道路,包括主车辆1在内的多个车辆在所述道路上通行。在图2的示例中,主车辆1处在自主驾驶模式中,根据本发明,前车灯和后车灯的照明强度降低,而其它车辆3、4(所述其它车辆是传统车辆)并非如此情况。因此,可看到,主车辆1的前光束20和后光束22没有传统车辆3、4的光束30、32、40、42强烈。
24.如上文所述,在附图的示例中,同时对前车灯和后车灯修改照明强度。然而,可设置,当检测到跟随主车辆1的车辆时,仅降低前车灯的照明强度,以便保持所述主车辆1对于跟随所述主车辆的车辆来说更可见。
25.因此,本发明的方法使得能够当主车辆处在自主驾驶模式中时大大地限制照明强度。所述车辆的该照明管理自动地表现为电消耗的降低和因此所述自主车辆的续航能力由于更少地使用电池的增加。估计到,在本发明的方法的范围中,可容易地实现30%的照明强度降低。
技术特征:
1.一种管理方法,所述管理方法用于管理能够在自主驾驶模式中运行的机动车辆的照明,所述机动车辆在下文中称作主车辆(1),所述管理方法包括多个步骤,所述多个步骤旨在:
‑
当所述主车辆(1)的车灯激活时,确定(32)所述主车辆(1)是否处在自主驾驶模式中;
‑
在自主驾驶模式中,降低所述主车辆(1)的照明强度直到阈值,所述阈值小于手动驾驶所述主车辆时所设置的照明强度。2.根据权利要求1所述的管理方法,其中,所述阈值对应于由地方性法规规定的最小化照明强度,所述地方性法规即所述主车辆(1)所行驶在的地方的现行法规。3.根据权利要求2所述的管理方法,其中,所述阈值对应于由集合中最严格的法规规定的最小化照明强度,所述集合包括多个地理区域的法规,例如欧洲法规和美国法规。4.根据上述权利要求中任一项所述的管理方法,其中,当所述主车辆(1)处在自主驾驶模式中时,并且当在所述主车辆(1)后方检测到车辆时,不降低后车灯的照明强度。5.根据权利要求1至3中任一项所述的管理方法,其中,前车灯和后车灯的照明强度降低。6.一种包括指令的电脑程序产品,当程序由电脑执行时,所述指令引导所述电脑实施根据上述权利要求中任一项所述的管理方法的步骤。7.一种自主驾驶系统(2),所述自主驾驶系统包括配置用于实施根据权利要求1至5中任一项所述的管理方法的计算机(10)、至少一个传感器(14a,14b,16a,16b,18)和致动器(12)。8.一种机动车辆(1),所述机动车辆装配有根据权利要求7所述的并且/或者实施根据权利要求1至5中任一项所述的管理方法的自主驾驶系统(2)。9.根据权利要求8所述的机动车辆(1),所述机动车辆包括电动或混合动力电动推进系统。
技术总结
本发明涉及一种管理方法,所述管理方法用于管理能够在自主驾驶模式中运行的机动车辆的照明,所述机动车辆在下文中称作主车辆(1),所述管理方法包括多个步骤,所述多个步骤旨在:
技术研发人员:J
受保护的技术使用者:标致雪铁龙汽车股份有限公司
技术研发日:2019.12.16
技术公布日:2021/11/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。