1.本发明涉及果蔬无损检测领域,尤其是一种基于视触觉的无损瓜果损伤识别与硬度检测装置。
背景技术:
2.现阶段瓜果硬度检测方法分为有损检测和无损检测。有损检测通常使用硬度计的探针插入果肉内部,然而这种方法会损伤果实,大大降低其贮藏时间。无损检测通常采用仪器,例如光谱或质构仪,这种检测方法速度快,而且果实无损,所以得到广泛关注,但是光谱仪器和质构仪等仪器成本高,很难得到广泛推广。
技术实现要素:
3.本发明的目的在于克服现有技术的缺点,提供一种基于视触觉的无损瓜果损伤识别与硬度检测装置,不会损伤瓜果,结构简单,生产成本低,可重复使用,使用寿命长。
4.为解决以上技术问题,本发明的技术方案为:一种基于视触觉的无损瓜果损伤识别与硬度检测装置,其不同之处在于:
5.其包括能开合的采样盒,所述采样盒包括下盒体和上盒体,所述上盒体可上下移动地设于所述下盒体的上方,所述上盒体的下端开口,所述下盒体的上端设有瓜果放置腔;
6.硅胶件,固定于所述上盒体的开口处,所述硅胶件包括硅胶膜和若干个硅胶突触,所述硅胶膜覆盖于所述开口处,所述若干个硅胶突触均匀间隔排布于所述硅胶膜上;
7.摄像头,与所述上盒体固定,用于采集待检测瓜果外观和所述硅胶件与瓜果接触过程中所述若干个硅胶突触与所述上盒体的相对移动轨迹视频;
8.及
9.处理器,与所述摄像头连接,采用深度学习网络模型进行损伤识别和硬度检测。
10.按以上技术方案,所述硅胶膜采用软质硅胶制成。
11.按以上技术方案,所述硅胶膜的硬度为12a。
12.按以上技术方案,所述硅胶膜为片状的透明硅胶膜。
13.按以上技术方案,所述硅胶膜的厚度为1mm。
14.按以上技术方案,所述硅胶突触固定于所述硅胶膜的下表面。
15.按以上技术方案,所述硅胶突触采用硬质硅胶制成。
16.按以上技术方案,所述硅胶突触的硬度为20a。
17.按以上技术方案,所述硅胶突触为有色硅胶。
18.按以上技术方案,其还包括驱动件,用于驱动所述上盒体上下移动以与所述下盒体打开或闭合。
19.对比现有技术,本发明的有益特点:该基于视触觉的无损瓜果损伤识别与硬度检测装置,在上盒体下压至与下盒体闭合的过程中,瓜果与硅胶件接触并挤压硅胶件,使硅胶突触发生移动,摄像头采集所有硅胶突触在上盒体下压过程中的移动轨迹和待检测瓜果外
观视频,并将所采集的视频传输给处理器,处理器采用深度学习网络模型进行损伤识别和硬度检测,不会损伤瓜果,结构简单,生产成本低,可重复使用,使用寿命长。
附图说明
20.图1为本发明实施例基于视触觉的无损瓜果损伤识别与硬度检测装置采样盒打开状态示意图;
21.图2为图1的a向视图;
22.图3为本发明实施例基于视触觉的无损瓜果损伤识别与硬度检测装置采样盒闭合状态示意图,其中采样盒中未放置瓜果;
23.图4为图3的b
‑
b剖视图;
24.图5为本发明实施例基于视触觉的无损瓜果损伤识别与硬度检测装置采样盒闭合状态示意图,其中采样盒中放置有瓜果;
25.图6为图5的c
‑
c剖视图;
26.其中:1
‑
下盒体、2
‑
上盒体、3
‑
瓜果放置板(301
‑
瓜果放置腔)、4
‑
硅胶膜、5
‑
硅胶突触、6
‑
摄像头、7
‑
数据传输线、8
‑
固定框、9
‑
螺钉、10
‑
底座、11
‑
步进电机(1101
‑
输出轴)、12
‑
滚珠丝杆、13
‑
螺母、14
‑
直线滑轨、15
‑
滑块、16
‑
猕猴桃。
具体实施方式
27.下面通过具体实施方式结合附图对本发明作进一步详细说明。
28.请参考图1至图6,基于视触觉的无损瓜果损伤识别与硬度检测装置,其包括采样盒、硅胶件、摄像头和处理器。采样盒能开合,采样盒包括下盒体1和上盒体2,其中下盒体1固定,上盒体2能上下移动地设于下盒体1的正上方。上盒体2向上移动时,采样盒逐渐打;上盒体2向下移动时,采样盒逐渐闭合。上盒体2的下端开口。下盒体1的上端固定有瓜果放置板3,瓜果放置板3上形成有向下凹陷的瓜果放置腔301。硅胶件固定于上盒体2的开口处,硅胶件包括固定成一体的硅胶膜4和硅胶突触5,硅胶膜4覆盖于上盒体2开口处,硅胶突触5有多个且呈矩形阵列状排布在硅胶膜上4。摄像头6与上盒体2固定,用于采集待检测瓜果外观以及硅胶件与瓜果接触过程中硅胶突触5与上盒体2的相对移动轨迹视频。处理器通过usb数据传输线7与摄像头6连接,数据传输线7将摄像头6采集到的视频传输给处理器后,处理器采用深度学习网络模型进行损伤识别和硬度检测。
29.优选地,为了使摄像头6更稳定,摄像头6固定于上盒体2内。更优选地,为了使摄像头6的拍摄效果更好,摄像头6位于瓜果放置腔301的正上方。为了避免摄像头6干涉硅胶件,摄像头6位于上盒体2内的上端。
30.优选地,为了避免压伤水果,硅胶膜4采用软质硅胶制成。
31.优选地,硅胶突触5固定于硅胶膜4的下表面。更优选地,为了使硅胶件与瓜果接触过程中,硅胶突触5的移动更明显,硅胶突触5采用硬质硅胶制成。
32.优选地,硅胶膜4的硬度为12a,为了避免压伤瓜果,硅胶突触5的硬度为20a。
33.优选地,为了使摄像头6拍摄更清晰,硅胶膜4为片状的透明硅胶膜。
34.优选地,硅胶膜4的长度为150mm、宽度为120mm、厚度为1mm。硅胶突触5的直径为2.5mm、厚度为3mm,相邻两个硅胶突触5之间的间距为8mm。
35.优选地,为了使视频中硅胶突触5更清楚,硅胶突触5为有色硅胶。更优选地,为了更加突出硅胶突触5,硅胶突触5为黑色。
36.具体地,采样盒还包括用于将硅胶膜4固定在上盒体2上的固定框8,硅胶膜4被夹在固定框8和上盒体2之间,固定框8和上盒体2通过螺钉9固定。
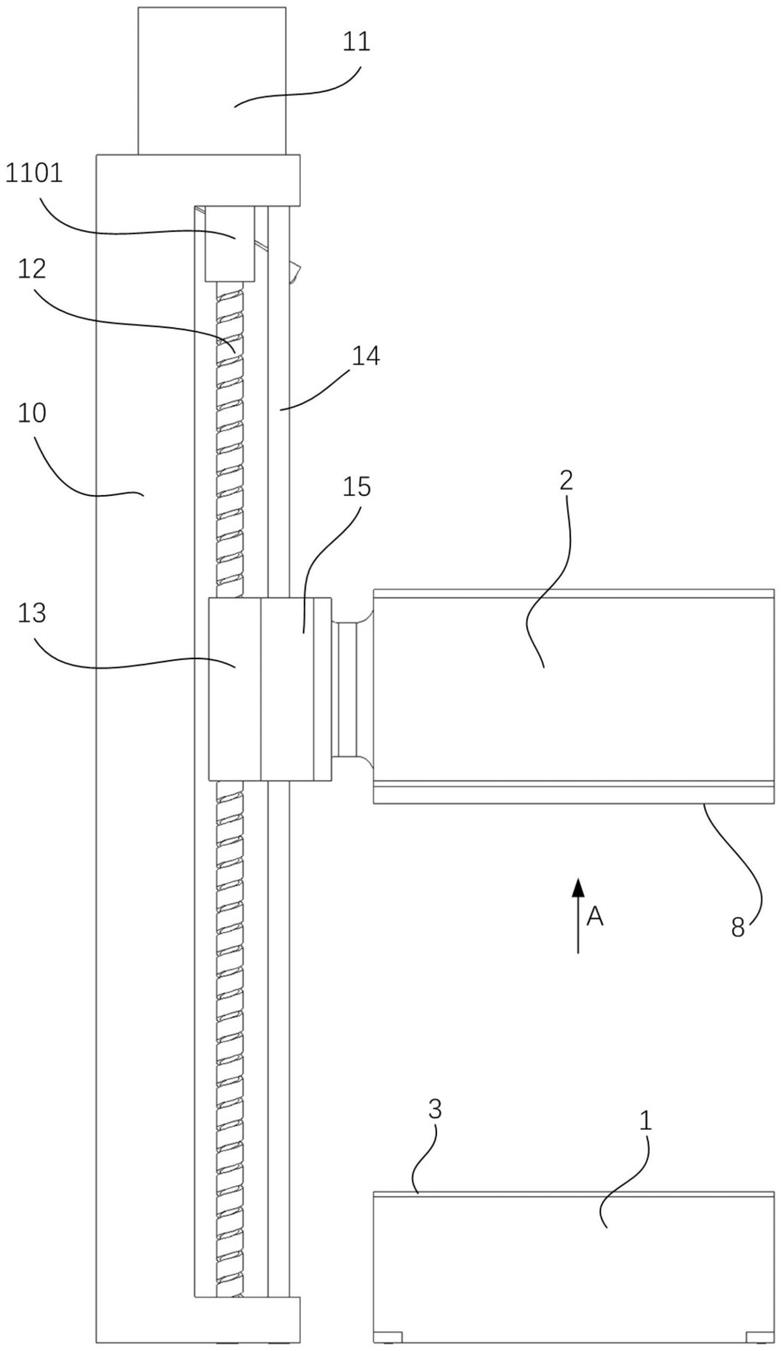
37.优选地,为了便于稳定地移动上盒体2,该装置还包括驱动件,用于驱动上盒体2上下移动以与下盒体1打开或闭合。在本发明的一些实施方式中,驱动件包括底座10、步进电机11、滚珠丝杆12、螺母13、直线滑轨14和滑块15,底座10竖直延伸,下盒体1固定于底座10的下端,步进电机11固定于底座10的上端,步进电机11的输出轴1101固定连接有滚珠丝杆12,滚珠丝杆12竖直延伸,滚珠丝杆12的表面螺纹连接有螺母13,直线滑轨14与底座10固定且与滚珠丝杆12平行设置,滑块15套设于直线滑轨14上,滑块15的一端与螺母13固定,滑块15的另一端与上盒体2固定,在步进电机11的作用下,滑块15可带动上盒体2沿直线滑轨14上下移动。更优选地,直线滑轨14有两条且关于滚珠丝杆12对称设置,滑块15有一个且分别与两个直线滑轨14配合。
38.请参考图1至图6,以猕猴桃16为例,本发明实施例的基于视触觉的无损瓜果损伤识别与硬度检测装置使用步骤为:请参考图1,打开采样盒,将猕猴桃16放入瓜果放置腔301内,使猕猴桃16的上半部分表面正对摄像头6放置,然后闭合采样盒,请参考图5和图6,在采样盒闭合过程中,摄像头6采集猕猴桃16外观、以及硅胶件与猕猴桃16接触过程中硅胶突触5与上盒体2的相对移动轨迹视频并传输给处理器,采样完成,处理器采用深度学习网络模型进行损伤识别和硬度检测。采集视频完成后,上下翻转猕猴桃16,使猕猴桃16的下半部分翻转至朝上即朝向摄像头6放置,然后闭合采样盒,在采样盒闭合过程中,摄像头6采集猕猴桃16外观、以及硅胶件与猕猴桃16接触过程中硅胶突触5与上盒体2的相对移动轨迹视频并传输给处理器,采样完成,处理器采用深度学习网络模型进行损伤识别和硬度检测。猕猴桃16的硬度为两次硬度检测所得结果的平均值。
39.在本发明一个优选的实施例中,深度学习模型为一种基于序列多成像的resnet18与lstm相结合的深度学习模型,用于评估瓜果的硬度和损伤或病变识别。该模型具体内容与步骤如下:
40.a)图像采集阶段:摄像头6通过usb数据传输线7与处理器连接,收集瓜果与硅胶突触接触视频,同时处理器运行的python开发环境调用opencv库,接收摄像头6录制的视频,并对视频进行抽帧处理,以便对视频进行lstm抽帧处理和特征提取。
41.b)预处理阶段:python开发环境对视频进行lstm抽帧处理得到的图片分辨率统一处理为224*224像素,进行归一化处理。
42.c)特征提取阶段:视频抽取的第一帧、中间帧、最后帧分别输入预先训练好的resnet18模型,视频帧在该模型中不断进行各项卷积层、池化层、全连接层特征提取操作,在最后一个全连接层中提取到1000个图像特征。
43.d)硬度预测阶段:将获得的视频每个帧的图片提取特征送到lstm模型中,每一个lstm层会输出128个特征,所有的lstm层均按顺序互联。即上一帧图像经过lstm运算之后的结果会传递到下一帧的lstm运算中,直到最后一帧,通过这样的方式可以利用到所有的视频帧的特征。最后这些特征经过一个全连接层之后即可预测猕猴桃硬度。
44.e)病变、损伤识别阶段:python开发环境将视频抽帧的最后一帧图片处理为224*
224分辨率并输入到另一个resnet18模型中对瓜果是否存在病变或者损伤进行判断。
45.以上内容是结合具体的实施方式对本发明所做的进一步详细说明,不能认定本发明的具体实施只局限于这些说明,对于本发明所属的技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。