技术特征:
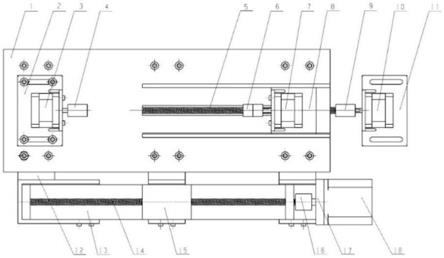
1.一种鞘材料裹覆与加捻的人工肌肉的制作装置,其特征在于,所述制作装置包括底板、步进电机ⅰ、步进电机ⅰ底座、联轴器、步进电机ⅱ、滑轨电机座、步进电机ⅲ、步进电机ⅲ底座、丝杆螺母副ⅰ、连接座、丝杆螺母支撑平台、送料平台、丝杆螺母副ⅱ、步进电机ⅳ、步进电机ⅳ底座、控制单元ⅰ、控制单元ⅱ、控制单元ⅲ;步进电机ⅰ、步进电机ⅱ、步进电机座ⅰ、滑轨电机座、联轴器及其控制单元ⅰ组成同轴转动部分,步进电机ⅰ通过步进电机ⅰ底座与底板固定连接,步进电机ⅱ通过滑轨电机座安装在底板的轨道中,与底板滑动连接;步进电机ⅰ和步进电机ⅱ的输出轴皆通过联轴器来连接固定芯线的两端,用于驱动芯线旋转及加捻;滑轨电机座安装在底板的滑动轨道之中,用于调节步进电机ⅱ的水平移动,一是为了使芯线的原始长度可以调整,提高装置的适用性,二是在人工肌肉加捻时电机可以随着人工肌肉的长度缩短而移动,防止加捻过紧时,人工肌肉所受轴向拉应力过大而撕裂;步进电机ⅲ、步进电机ⅲ底座及控制单元ⅱ组成收缩平动部分,步进电机ⅲ输出轴通过联轴器与丝杆螺母副ⅰ的丝杆连接,用于驱动丝杆旋转;连接座用于连接支撑底板和安装与固定丝杆螺母副支撑平台;所述的送料平台下端通过滑轨与丝杆螺母副支撑平台相连,中心部位与丝杆螺母副ⅱ固定连接;丝杆螺母为其提供驱动力,滑轨约束送料平台转动的同时进行滑动导向、实现送料平台载着鞘材料进行水平移动,鞘材料从芯线的一端均匀覆盖到另一端;所述的控制单元ⅰ、ⅱ、ⅲ为单片机控制,控制单元ⅰ分别向步进电机ⅰ、步进电机ⅱ提供不同或相同转速控制;控制单元ⅱ用于控制步进电机ⅲ的转向及转速,通过驱动丝杆螺母副ⅰ实现步进电机ⅱ的水平移动;控制单元ⅲ用于控制步进电机ⅳ的转向及转速,通过驱动丝杆螺母副ⅱ实现送料平台的水平移动。2.如权利要求1所述的一种鞘材料裹覆与加捻的人工肌肉的制作装置,其特征在于,所述的连接座的一端连接底板用作底板的支撑柱,另一端为槽状用于安装与固定丝杆螺母副支撑平台。3.如权利要求1所述的一种鞘材料裹覆与加捻的人工肌肉的制作装置,其特征在于,所述的丝杆螺母副支撑平台设有侧面和顶面三条水平轨道,侧面两条水平轨道,顶面一条水平轨道,侧面轨道内部放置螺母,通过螺栓与连接座的槽结构联接,用于固定支撑平台;顶面轨道与送料平台连接,限制送料平台的旋转自由度。4.利用如权利要求1所述制作装置制备鞘材料裹覆与加捻的人工肌肉的方法,其特征在于,具体步骤如下:芯线两端分别固定在联轴器ⅰ、联轴器ⅱ上,鞘材料固定在送料平台上,将引出的鞘材料引出贴附在芯线上靠近联轴器ⅰ的一端;第一阶段,步进电机ⅰ、步进电机ⅱ、步进电机ⅳ同时工作,步进电机ⅰ、步进电机ⅱ同轴同转速转动,使鞘材料包裹在芯线表面,同时,步进电机ⅳ驱动丝杆螺母副ⅱ带动送料平台进行匀速平动,使得鞘材料从芯线一端均匀地裹覆到另一端;第二阶段,鞘材料裹覆完成后,步进电机ⅰ、步进电机ⅱ、步进电机ⅲ同时工作,步进电机ⅰ、步进电机ⅱ同轴不同速转动,对包裹鞘材料的芯线进行加捻,步进电机ⅲ驱动丝杆螺母副ⅰ带动滑轨电机座和步进电机ⅱ随着包裹鞘材料的芯线轴向缩短进行水平移动,直至包裹鞘材料的芯线完全形成螺旋结构,从而得到人工肌肉。5.如权利要求4所述的方法,其特征在于,设a点为芯线上的任意一点,芯线转速为n1(r/s),步进电机ⅰ转速为n
11
(r/s),步进电机ⅱ转速为n
12
(r/s),步进电机ⅳ转速为n2(r/s),鞘材料在芯线上的水平移动速度为v1(mm/s),送料平台带动芯线的水平移动速度为v2(mm/s),鞘材料对芯线的包裹角度α(
°
),鞘材料
的宽度为x1(mm),鞘材料在芯线上的贴覆长度为d(mm),鞘材料在芯线上裹覆一圈水平移动距离为x1(mm),芯线直径为d,芯线包裹层数为z(层),丝杆螺母副ⅱ14螺距为s2(mm),加捻捻度为s(t/m),芯线长度为l(mm);欲求中心轴转速n1(r/s)、丝杆驱动转速n2(r/s)与丝杆螺距s2(mm)、碳纳米管薄膜对芯线的包裹角度α、芯线直径d的代数关系;约定假设:1、鞘材料渡过芯线上a点的时间t为a点的裹覆时间,由此推算裹覆层数z;2、为保证裹覆的均匀性,角度α需保持不变,这需要使鞘材料在芯线上水平移动速度v1=丝杆平台的移动距离v2;解:在经历时间t后,鞘材料在芯线上的水平移动距离为:l1=v1t=n1t s1;丝杆平台带动cnt forest水平移动距离为:l2=v2t=n2t s2;即:v2=n2s2;欲使两者速度相等:v1=v2,得:又有:推算层数:设a=sinα∈(0,1),得:鞘芯结构人工肌肉捻度计算:由公式(1)、公式(2)确定中心轴转速n1(r/s)、步进电机ⅲn2(r/s)与丝杆螺母副ⅱ螺距s2(mm)、鞘材料对芯线的包裹角度α、芯线直径d的代数关系;确定控制单元ⅰ、ⅱ电控参数、步进电机ⅰ与步进电机ⅱ的中心距、丝杆螺母副ⅱ螺距、鞘材料对芯线的包裹角度与所制备鞘芯人工肌肉的参数对应关系。
技术总结
本发明属于人工肌肉型柔性驱动器的制备和应用领域,特别涉及一种鞘材料裹覆与加捻的人工肌肉的制作装置及方法。本发明通过控制三组电机的协调运转来实现鞘
技术研发人员:胡兴好 周童 王英明 丁建宁 程广贵
受保护的技术使用者:江苏大学
技术研发日:2021.06.25
技术公布日:2021/11/19
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。