1.本发明主要涉及医疗器械领域,特别涉及一种单向驱动药物输注装置。
背景技术:
2.药物输注装置是通过向患者体内持续注射药物,从而达到疾病治疗目的的一种医疗器械装置。药物输注装置广泛的用于糖尿病的治疗,按照人体需要的剂量将胰岛素持续地输注到患者的皮下,以此来模拟胰腺的分泌功能,从而保持患者血糖的稳定。药物流体通常储存在输注泵体内部,现有的药物输注装置通常是将泵体直接通过医用胶布粘贴在患者身体上,患者操作远程设备进行输注。
3.专利us 6656158 b2公开了一种药物输注装置,利用可线性运动的驱动端推动轮齿运动,进而实现药物输注。其中,输注装置还额外设置有防反转的固定棘爪,避免驱动轮反向转动。因此,其内部结构复杂,空间利用率比较低,输注装置体积、质量较大。
4.因此,现有技术亟需一种内部空间利用率较高、质量轻、体积较小的单向驱动药物输注装置。
技术实现要素:
5.本发明实施例公开了一种单向驱动药物输注装置,利用与驱动轮表面相接触的摩擦部件防止驱动轮反转,充分利用了输注装置的内部空间,减小了输注装置的质量和体积。
6.本发明公开了一种单向驱动药物输注装置,包括:储药单元、活塞和螺杆,活塞设置于储药单元中,活塞与螺杆相连接;驱动模块,驱动模块包括互相配合运作的驱动轮和至少一个驱动臂,驱动轮的圆周面设置有轮齿,驱动臂推动轮齿使驱动轮转动,进而驱动螺杆前进;动力模块,动力模块与驱动臂相连接;与动力模块相连接的控制模块,控制模块控制动力模块对驱动臂施加不同的作用力,驱动臂进行线性往复运动,进而驱动驱动轮转动;和摩擦部件,摩擦部件与驱动轮表面相接触,以增大驱动轮受到的最大静摩擦力。
7.根据本发明的一个方面,动力模块对驱动臂施加的作用力包括不同线性方向或不同大小的作用力。
8.根据本发明的一个方面,驱动臂包括多种不同的运动幅度或多种不同的运动速率。
9.根据本发明的一个方面,动力模块包括分别与驱动臂相连接的第一动力单元和第二动力单元,在动力模块的作用下,驱动臂只在一个运动方向上推动轮齿。
10.根据本发明的一个方面,第一动力单元包括电驱动型线性驱动器或者电加热型线性驱动器,第二动力单元包括电驱动型线性驱动器、电加热型线性驱动器或者弹性件,控制模块控制第一动力单元或第二动力单元动力的大小或输出频率,以控制驱动臂的运动幅度或运动速率。
11.根据本发明的一个方面,第一动力单元为前进部件,第二动力单元为复位部件,在工作时,前进部件对驱动臂施加动力以推动轮齿前进,复位部件对驱动臂施加动力使驱动
臂复位。
12.根据本发明的一个方面,驱动轮为棘轮,轮齿为棘轮齿,驱动臂为棘爪,棘爪推动棘轮齿,使棘轮间歇性转动。
13.根据本发明的一个方面,驱动臂包括两个上下设置且端部不平齐的驱动臂前端,两个驱动臂前端可交替推动轮齿。
14.根据本发明的一个方面,摩擦部件具有弹性,摩擦部件与驱动轮表面相接触的位置包括驱动轮的轮齿面和非轮齿面。
15.根据本发明的一个方面,还包括底座,摩擦部件为底座的一部分,驱动轮活动装配于底座上的摩擦部件处,并与摩擦部件摩擦配合。
16.根据本发明的一个方面,摩擦部件设置于底座上,摩擦部件与驱动轮的侧面摩擦配合。
17.与现有技术相比,本发明的技术方案具备以下优点:
18.本发明公开的单向驱动药物输注装置中,控制模块控制动力模块对驱动臂施加不同的作用力,驱动臂进行线性往复运动,进而驱动驱动轮转动。线性往复运动的驱动臂具有狭小的运作空间,使得输注装置内部结构更紧凑,减小了输注装置的体积。另外,输注装置还包括摩擦部件,摩擦部件与驱动轮表面相接触,以增大驱动轮受到的最大静摩擦力。驱动轮受到的最大静摩擦力增大后,当驱动臂在轮齿表面滑动时,驱动轮不转动,提升了药物输注的准确性,并且消除了安全隐患,增强用户体验。
19.进一步的,驱动臂包括多种不同的运动幅度或多种不同的运动速率。驱动臂具有多种运作模式,输注装置将具有多种不同的输注模式,体液水平能够被精确控制,增强用户体验。
20.进一步的,第一动力单元包括电驱动型线性驱动器或者电加热型线性驱动器,第二动力单元包括电驱动型线性驱动器、电加热型线性驱动器或弹性件。线性驱动器输出动力大小可通过电流控制,使动力输出更稳定,进而使驱动臂运动的幅度或速率稳定可控。另外,当第二动力单元为弹性件时,驱动臂可以自动复位,不需要消耗电能,从而降低了输注装置的功耗。
21.进一步的,驱动臂包括两个上下设置且端部不平齐的驱动臂前端,两个驱动臂前端可交替推动轮齿。两个驱动臂前端的端部不平齐,驱动臂复位距离小于一个齿距后即可实施第二次推动,进一步减小了驱动臂的运动幅度,节省空间,进一步减小输注装置的体积尺寸。
22.进一步的,摩擦部件具有弹性,摩擦部件与驱动轮表面相接触的位置包括驱动轮的轮齿面和非轮齿面。弹性摩擦部件能够更好起到增大最大静摩擦力的作用。同时,弹性摩擦部件质量较小,其形状、体积、位置设置均能够灵活设计,不仅减小了输注装置的质量,也提高输注装置内部空间的利用率。
附图说明
23.图1a为根据本发明一个实施例的单向驱动药物输注装置的模块示意图;
24.图1b-图1c为根据本发明一个实施例的两种单向驱动药物输注装置的俯视图;
25.图2a-图2b为根据本发明一个实施例输注模块的内部结构示意图,图2b为图2a中
驱动模块的侧视图;
26.图3为根据本发明一个实施例驱动臂进行多种线性往复运动幅度的示意图;
27.图4a-图4c为根据本发明一个实施例中摩擦部件与驱动轮的结构示意图;
28.图5a-图5c为根据本发明另一个实施例驱动臂包括两个驱动臂前端的结构示意图,图5b、图5c为图5a的侧视图。
具体实施方式
29.如前所述,现有技术的药物输注装置内部结构设计复杂,空间利用率比较低,增大的输注装置的质量与体积。
30.经研究发现,造成上述问题的原因为:输注装置内部额外设置有防止驱动轮反转的固定棘爪。
31.为了解决该问题,本发明公开了一种单向驱动药物输注装置,利用与驱动轮摩擦配合的摩擦部件防止驱动轮反转,充分利用了输注装置的内部空间,减小了输注装置的质量和体积,增强用户体验。
32.现在将参照附图来详细描述本发明的各种示例性实施例。应理解,除非另外具体说明,否则在这些实施例中阐述的部件和步骤的相对布置、数字表达式和数值不应被理解为对本发明范围的限制。
33.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不必然按照实际的比例关系绘制,例如某些单元的厚度、宽度、长度或距离可以相对于其他结构有所放大。
34.以下对示例性实施例的描述仅仅是说明性的,在任何意义上都不作为对本发明及其应用或使用的任何限制。这里对于相关领域普通技术人员已知的技术、方法和装置可能不作详细讨论,但在适用这些技术、方法和装置情况下,这些技术、方法和装置应当被视为本说明书的一部分。
35.应注意,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图说明中将不需要对其进行进一步讨论。
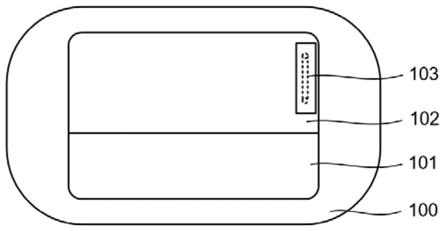
36.图1a为本发明的实施例单向驱动药物输注装置模块关系示意图。图1b、图1c分别为本发明两个不同实施例单向驱动药物输注装置的俯视图。
37.如图1a所示,控制模块发出指令控制动力模块输出动力,动力作用于驱动模块进而驱动螺杆前进,输注装置完成药物输注。为了便于叙述,下文将动力模块、驱动模块和螺杆由输注模块代替。
38.请参考图1b和图1c,本发明实施例的单向驱动药物输注装置包括:粘性贴片100、控制模块101、输注模块102和输注针103。
39.控制模块101用于控制动力模块的动力输出以控制药物输注。控制模块101还可以与远程设备(未示出)之间建立无线通信。在本发明的一个实施例中,控制模块101中还包括电源(未示出)。
40.输注模块102包括用于实现药物输注机械功能的各个单元,下文将结合不同实施例详细叙述。
41.在本发明实施例中,控制模块101和输注模块102分开设计,两者通过防水插塞相
连接。输注模块102一次性使用后可抛弃,而控制模块101可以重复使用,如图1b所示。在本发明其它实施例中,输注模块102和控制模块101设置于同一个壳体10的内部,两者通过导线连接,一次使用后可整体抛弃,如图1c所示。
42.粘性贴片100用于将输注模块102、控制模块101或两者整体粘贴在皮肤表面。
43.输注针103的一端与输注模块102出口连通,另一端送至皮下,以将药物输注到皮下。在本发明实施例中,输注针103设置于输注模块102的一端部。在本发明的其它实施例中,输注针103还可根据其所具备的功能或器件的结构特点而设置在其它位置,如设置于输注装置的中间位置等,这里并不作具体限制。输注针103为刚性输注针或柔性输注针,或者根据所处的不同位置以及实现不同的功能,输注针103也可采用刚性输注针和柔性输注针相结合的设计,在这里并不作具体限制。优选的,在本发明实施例中,输注针103为刚性输注针。
44.图2a为本发明实施例输注模块102的内部结构示意图。图2b为图2a中驱动模块的侧视图。
45.为了清晰表示驱动模块的驱动关系,图2b中未示出动力模块。
46.输注模块102内部结构主要包括储药单元110、活塞120、螺杆130、驱动模块和动力模块。
47.储药单元110用于存储药物。药物包括但不限于胰岛素、胰高血糖素、抗生素、营养液、镇痛药、吗啡、抗凝血剂、基因治疗药物、心血管药物或化疗药物等。
48.活塞120用于将液体药物输注到体内。
49.螺杆130与活塞120相连接,进而推动活塞120向前运动,以达到输注药物的目的。螺杆130为刚性螺杆或柔性螺杆。当螺杆130为柔性螺杆时,螺杆130可以设计成弯曲状。在本发明的一个实施例中,柔性螺杆由多个带有螺纹的子单元活动连接而成。
50.驱动模块可驱动螺杆130前进。驱动模块包括互相配合运作的驱动轮140和一个驱动臂150,驱动轮140与螺杆130相连接。驱动轮140的圆周表面设置有轮齿141。
51.在这里,互相配合运作是指当驱动臂150以某种方式或模式运作时,驱动轮140能够执行相关联的运作方式或运作模式,以实现驱动螺杆130运动和完成药物输注的目标。下文两者互相配合运作的意义与此处的意义相同。
52.需要说明的是,运作方式与运作模式属于不同的技术概念。运作方式是指驱动臂150具体的工作方法或工作形式,如往复运动等。运作模式表示由驱动臂150的运作方式带来的效果,如运动幅度变化、运动速率变化等。
53.在本发明的实施例中,驱动臂150可线性往复运动,如图2a与图2b中的l方向。优选的,驱动臂150为一个线性往复运动的棘爪,驱动轮140为棘轮,轮齿141为棘轮齿。棘轮能够更容易被推动。在本发明的又一个实施例中,驱动轮140为普通齿轮。与旋转往复运动的驱动臂相比,线性往复运动的驱动臂150可节省其运动空间,输注装置内部结构可以设计地更紧凑,减小输注装置的体积。
54.明显的,由于驱动臂150为主动结构,驱动轮140为从动结构。因此,动力模块与驱动臂150相连接并向驱动臂150施加动力,使驱动臂150进行线性往复运动。并且还可使驱动臂150具有多种不同的运作模式,如不同的往复运动幅度或者运动速率。在这里,动力模块与驱动臂150的连接方式包括机械连接或电连接。
55.具体的,在本发明实施例中,动力模块包括第一动力单元和第二动力单元。因此,第一动力单元和第二动力单元分别与驱动臂150电连接或机械连接,并向驱动臂150施加动力。具体的,在本发明实施例中,第一动力单元为前进部件180,第二动力单元为复位部件170,如图2a所示。前进部件180对驱动臂150施加动力,驱动臂150可推动轮齿141,使驱动轮140转动,进而实现药物输注。复位部件170对驱动臂150施加动力,驱动臂150将复位运动,驱动臂150停止推动轮齿141,驱动轮140不转动。因此,驱动臂150受到不同线性方向的作用力。
56.复位部件170包括电驱动型线性驱动器、电加热型线性驱动器或者弹性件。弹性件的种类包括但不限于压缩弹簧、拉伸弹簧、扭力弹簧、弹片、弹性板、弹性棒、弹性橡胶等。弹性件能够不借助外力自动将驱动臂150弹回复位。具体的,在本发明实施例中,复位部件170为扭力弹簧。扭力弹簧更有利于驱动臂150复位。
57.在本发明的另一个实施例中,复位部件170为电驱动型线性驱动器或电加热型线性驱动器,如形状记忆合金。通电后,线性驱动器材料的物理形态发生变化,线性驱动器发生收缩形变,输出动力。电流越大,线性驱动器的收缩形变量越大,动力就越大。明显的,当电流恒定,线性驱动器输出的驱动力就恒定。因此,线性驱动器能够输出稳定且可控的驱动力,使得药物输注的过程稳定可控,也增强了用户体验。
58.前进部件180直接向驱动臂150施加动力。前进部件180包括电驱动型线性驱动器或者电加热型线性驱动器。具体的,在本发明实施例中,前进部件180为形状记忆合金。
59.如图2a所示,本发明实施例驱动臂150驱动驱动轮140转动的原理如下。控制模块控制前进部件180以f
p
拉动驱动臂150,驱动臂150向l1方向前进,驱动臂前端151可推动轮齿141前进,驱动轮140转动以驱动螺杆130向d
a
方向前进,输注装置进行药物输注。此时,采用弹性件的复位部件170产生逐渐增强的弹力f
r
。当前进部件180停止提供动力,驱动臂150在弹力f
r
的作用下向l2方向运动,驱动臂前端151停止推动轮齿141,而是在轮齿141表面滑动复位,驱动轮140停止转动,螺杆130停止前进,输注装置不进行药物输注。驱动臂前端151在轮齿141表面滑动复位,直至驱动臂150停止运动,驱动臂150完成了一次线性往复运动l。依此类推,驱动臂150可完成多次线性往复运动。明显的,本发明实施例输注装置在工作时,驱动轮140的转动方式为间歇性转动,即转动-停止-转动-停止-...的方式。
60.图3为本发明实施例驱动臂150进行多种线性往复运动幅度的示意图。
61.当驱动臂150受到的作用力大小不同,其运动速率或者运动幅度会有所不同。因此,本发明实施例驱动臂150实现两种线性往复运动幅度的原理如下。如前所述,控制模块控制前进部件180动力输出的大小,并结合复位部件170的作用,驱动臂150进行线性往复运动,并使驱动臂前端151前进和复位。e
n
表示驱动臂前端151到达的位置,如e1、e2、e3、e4、e5。h
n
分别表示两个不同位置e
n
之间的距离。s
n
表示前进部件180动力的作用点s在线性往复运动过程中的不同位置。图3中点虚线表示s的运动轨迹,则s1、s2、s3、s4、s5分别与e1、e2、e3、e4、e5相对应。明显的,不同s
n
之间的运动距离可用于表示驱动臂150的运动幅度。具体的,在本发明实施例中,h1为轮齿141的齿距,h1=3h2。当前进部件180按照指令使驱动臂前端151推动轮齿141从e1前进到e2位置时,前进部件180停止输出动力,复位部件170使驱动臂前端151复位到e3位置后停止复位,驱动臂150完成第一次线性往复运动,驱动臂150的运动幅度为s
1-s2和s
2-s3。在第一次线性往复运动过程中,驱动臂前端151推动轮齿141前进的距离为h1,
药物输注量为v1,复位距离为h3。此时,药物输注量v1视为第一模式下的单位输注量。当进行下一次驱动时,前进部件180输出动力,驱动臂前端151在前进距离h3的过程中,驱动轮140不发生转动,输注装置不进行药物输注。当驱动臂前端151到达e2位置并继续前进h4的距离时,驱动臂前端151推动轮齿141前进至e4位置,驱动轮140转动,输注装置进行药物输注。前进部件180停止动力输出,复位部件170使驱动臂前端151复位到某一特定位置,如e5位置,驱动臂150完成第二次线性往复运动,驱动臂150的运动幅度为s
3-s4和s
4-s5。在第二次线性往复运动的过程中,驱动臂前端151前进距离为(h3 h4),药物输注量为v2。此时,药物输注量v2为第二模式下的单位输注量。明显的,驱动臂150分别只在运动幅度s
1-s2和s
2-s4下才驱动驱动轮140转动。由于两种模式下运动幅度s
1-s2大于运动幅度s
2-s4,因此,h1>h4,且v1>v2。因此,本发明实施例的输注装置具有两种不同的单位输注量。
62.依此类推,e1、e2、e3、e4、e5之间的距离可以任意选择,如h1=h2、h1=2h2、h1=4h2等,输注装置则具有多种不同的单位输注量。或者作用力点s还可以运动到s6的位置,且s4和s6并不是驱动臂150运动的极限位置,在这里并不作具体限制。
63.需要说明的是,如上文所述,在本发明的实施例中,驱动臂前端151前进,输注装置不一定进行药物输注,只有驱动臂前端151推动轮齿141前进,输注装置才进行药物输注。
64.驱动臂150每一次往复运动幅度对应一个单位输注量。驱动臂150具备多种不同的运动幅度,因此,药物输注装置具有多种不同的单位输注量。以胰岛素为例,本发明实施例药物输注装置的单位输注量范围为0.0005u~0.25u(在这里,单位输注量范围包括端点数值,即单位输注量包括0.0005u和0.25u)。如在本发明的一些实施例中,药物输注装置的单位输注量可包括0.001u、0.0025u、0.005u、0.0075u、0.01u、0.025u、0.05u、0.075u、0.1u等。具体的,在本发明实施例中,药物输注装置的单位输注量包括0.005u、0.0075u、0.01u、0.025u、0.05u。
65.这里需要说明的是,当h1=h2时,输注装置的单位输注量始终保持v1,驱动臂150的线性运动幅度始终保持s
1-s2与s
2-s1,此时药物输注量相对稳定。
66.本发明另一个实施例还可以增大前进部件180动力输出的频率,增大驱动臂150线性往复运动的频率,进而提高输注装置的药物输注速率。本发明实施例的输注装置均可以改变动力模块动力输出的大小,使输注装置具备多种输注速率。在这里,动力模块动力输出大小的变化能够改变驱动臂150单向运动的速率、往复运动的速率或者往复运动的频率等,这里并不作具体限制。
67.当药物输注装置具备多种输注模式后,用户可以根据实际需求灵活选择输注模式,稳定体液参数水平。以胰岛素稳定血糖水平为例,某些用户或者输注位置的身体组织对胰岛素的吸收比较慢,用户可以选择单位输注量相对较小或输注速率较低的模式,既稳定了血糖水平,又提高了胰岛素的利用率,且减轻了身体组织的负担。再例如,餐后血糖飙升,用户可以先选择单位输注量相对较大或输注速率相对较高的输注模式抑制血糖快速上升,然后再选择单位输注量或输注速率中等的输注模式,最后再选择单位输注量相对较小或输注速率相对较低的输注模式将血糖缓慢稳定在合理水平。再例如,每顿餐后需要注射的胰岛素大剂量不相同,而且一天不同时段身体对胰岛素基础量需求也不相同,多种输注模式的输注装置可根据用户实际需求灵活选择(用户选择或者闭环系统自动选择)输注模式,实现精确控制血糖水平的目标。
68.图4a-图4c为本发明实施例中摩擦部件191与驱动轮140相接触的结构示意图。
69.驱动轮140运动可以直接驱动螺杆前进,完成药物输注。因此,当驱动臂150不推动轮齿141时,驱动轮140应当停止转动。常规的,棘爪具有一定的弹性才能确保不断推动棘轮运动。因此,在本发明的实施例中,当驱动臂前端151在轮齿141表面滑动时,弯曲的驱动臂前端151通过与轮齿141接触对驱动轮140施加一定的压力。明显的,由于轮齿141和驱动轮140圆周的结构特点,在不同位置,驱动臂前端151对驱动轮140施加的压力不相等。因此,当驱动臂前端151在轮齿141表面滑动(复位运动,或者只滑动前进而不推动轮齿141)时,驱动轮140有向前进方向转动或者反向转动的可能。如果出现这样的转动,药物输注的准确性将降低,且还存在安全隐患。因此,本发明的实施例还包括摩擦部件191。摩擦部件191与驱动轮140的表面相接触,增大驱动轮140受到的最大静摩擦力,以确保当驱动臂150在轮齿141表面滑动时,驱动轮140不会转动,避免给用户带来安全隐患。
70.需要说明的是,与驱动臂150对轮齿141施加的推动力相比,弯曲的驱动臂150在轮齿141表面滑动时对驱动轮140施加的作用力很小。因此,摩擦部件191的存在并不影响驱动臂150的实际推动,即,不影响药物输注。
71.本发明其他实施例并不限制摩擦配合的位置,只要能够满足增大驱动轮140受到的最大静摩擦力的条件即可。本发明实施例也不限制摩擦部件191的材料,如摩擦部件191是弹性件、塑料件或金属件等。优选的,摩擦部件191具有弹性,如硅胶等。
72.在这里,摩擦配合是两个结构之间预设有一定压力,进而产生摩擦力,下文的摩擦配合与此处的意义相同。
73.优选的,在本发明实施例中,摩擦部件191与驱动轮140的表面相接触的位置位于驱动轮140的非轮齿表面。如在本发明的一个实施例中,输注装置还包括底座190。驱动轮140活动装配于底座190上。此时,摩擦部件191为底座190的一部分。如图4a所示,在本发明实施例中,摩擦部件191位于驱动轮140和底座190活动装配的位置,如图4a中虚线框a处。
74.如图4b所示,在本发明的另一个实施例中,摩擦部件191设置于底座190上。摩擦部件191与驱动轮140摩擦配合的位置在位置b或位置c处(驱动轮140的侧面,如虚线框所示)。
75.如图4c所示,摩擦部件191还可以与驱动轮140的轮齿面相接触,同样能够增大驱动轮140受到的最大静摩擦力。
76.在一种输注装置中,单个棘爪推动齿轮转动,完成药物输注。但是,常规的棘爪推动一般都需要设置额外防反转的固定棘爪,或者两个相向设置的棘爪相配合使用,才能确保齿轮不发生反向转动。此时,输注装置中棘爪的数量较多,设计比较复杂,输注装置内部的空间利用率较低。
77.而本发明实施例公开的输注装置中,不必额外设置防反转棘爪,而是用摩擦部件代替。且摩擦部件通过对驱动轮的表面施压,进而增大驱动轮受到的最大静摩擦力。同时,摩擦部件的体积、形状、设置的位置均可根据输注装置的内部空间灵活设计,充分利用内部空间,有效缩小输注装置的体积。另外,相对于防反转棘爪,摩擦部件的质量更轻,输注装置的重量减小,极大增强了用户的体验。
78.图5a-图5c为本发明另一个实施例驱动臂250包括两个驱动臂前端251a与251b的结构示意图。图5b、图5c为图5a的侧视图。
79.需要说明的是,为了清晰表示驱动臂与驱动轮的结构关系,动力模块在图5a-图5c
中未示出,请参考前文所述
80.在本发明的另一个实施例中,驱动臂250包括两个上下设置的驱动臂前端251a与251b。两个驱动臂前端的端部不平齐,如图5b所示,两个端部相距距离为m。
81.在这里,上下设置是指俯视驱动臂250时,驱动臂前端251a将251b部分遮挡,如图5a所示。当侧视驱动臂250时,驱动臂前端251a将251b均呈现,如图5b所示。
82.具体的,在本发明实施例中,若齿距为t,则m=t/n(n>1)。此时,驱动臂250复位小于一个齿距t的距离即可开始实施下一次推动动作,进一步减小驱动臂250的运动空间。优选的,m=t/2。此时,两个驱动臂前端251a与251b可交替推动轮齿241。驱动臂250每次复位运动t/2的距离,即可开始下一次推动,如图5b和图5c所示。
83.明显的,本发明实施例的动力模块也可以对驱动臂250施加不同大小的作用力,使驱动臂具有多种不同的运动模式,如前文所述。而且也可以只使用驱动臂前端251a或251b单独推动轮齿241,使驱动轮240转动,以驱动螺杆230前进。
84.在本发明的其他实施例中,m=(3t)/2,或者驱动臂还可以包括多于2个驱动臂前端,多个驱动臂前端可交替推动轮齿,或者输注装置包括多于一个的驱动臂,在这里并不作具体限制,只要能够满足推动驱动轮转动的条件即可。
85.综上所述,本发明公开了一种单向驱动药物输注装置,利用摩擦部件防止驱动轮反转,充分利用了输注装置的内部空间,减小了输注装置的质量和体积,提升了用户体验。
86.虽然已经通过示例对本发明的一些特定实施例进行了详细说明,但是本领域的技术人员应该理解,以上示例仅是为了进行说明,而不是为了限制本发明的范围。本领域的技术人员应该理解,可在不脱离本发明的范围和精神的情况下,对以上实施例进行修改。本发明的范围由所附权利要求来限定。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。