1.本发明涉及一种设计和制造用于眼科,特别是用于白内障手术的人工晶状体的方法,提供了眼睛内优化的场曲。
背景技术:
2.晶状体(眼晶状体)是一种复杂的结构,其功能一直是几个世纪以来研究的主题。晶状体的折射率呈现梯度,折射率的范围为从晶状体表面处的约1.390到其核心处的约1.409。该梯度是通过晶状体纤维细胞的细胞质中晶状体蛋白的可变浓度来实现的。尽管蛋白含量高,但由于蛋白的紧密分布,健康的眼晶状体仍显示出显著的透明度。此外,眼晶状体具有非球面表面,这降低了眼内的球差。另外,人眼的设计允许在像差和相对于视网膜形状的场曲方面优化边缘处的图像形成。
3.白内障是一种病理状态,其中天然晶状体失去其透明度,并且主要由于光散射和像差而使视网膜处的图像形成退化。在大多数情况下,为了解决该问题,进行白内障手术,通过该手术从眼睛中取出退化的眼晶状体,并且植入特殊植入物(人工晶状体iol)作为所提取的晶状体的替代,以代替其屈光力。
4.人工晶状体已经在眼科中使用了半个多世纪。从那时起,iol的植入不仅在眼科领域,而且在一般医学领域,已成为最常见且成功的手术。选择植入物使得其提供所需的屈光力,以优化中央凹,视网膜的分辨率最高的位置,的聚焦,替代患者的天然晶状体。假晶状体眼(眼晶状体由iol替代)的中央视场具有图像质量良好的特点,在实践中由于手术后的球面柱屈光不正而整体受限,或者在一些情况下,取决于所使用的植入物,由于球差的引入而受限。
5.在大多数情况下,视场边缘的光学质量不被认为是iol设计中最重要的方面之一,因为对于视网膜上的大离心率,感光细胞的数量较少并且神经元会聚较大。由于视网膜的这些生理局限,iol已被设计为专注于视网膜的中心部分(针对靠近中央凹的小角度)的图像质量,而没有考虑对视场较远边缘的影响。虽然自然眼晶状体具有适应于视网膜形状的特性,但iol并未将这一现象考虑在内。然而,存在边缘视觉的质量可能会对视觉质量产生重大影响的特定应用,诸如对视觉图案的运动方向的检测,或者甚至简单的活动,诸如对较小边缘对象的检测。更重要的是,事实上眼睛节点的变化与放大率的一般变化及其对视场角的依赖性(畸变)相关联。
6.尽管没有详细研究假晶状体眼的边缘性能,但是有证据表明,处于较远边缘中的对象感知到的形状的变化可能会对患者的空间取向和安全性有影响。
7.在专利和科学文献中实现了多种类型的iol。例如,文献us4504982a(burk)描述了一种用于眼内植入的通用非球面晶状体,其具有双凸形状。但是,在该非球面晶状体的设计中没有考虑到边缘视觉。
8.ca2587432c(norrby)描述了一种选择人工晶状体的方法,该方法专门涉及光学和解剖学测量,这些测量随后被用于计算所需iol的屈光力和球差。所述发明没有考虑针对边
缘图像质量的可能设置,而且,没有包括患者的术前主观评价(心理物理方面)。
9.au2007247491b2(gerlach)描述了一种设计具有给定非球面以补偿角膜像差的人工晶状体的方法,考虑了瞳孔的潜在离心率。相同原理在相同发明人的后续文献中有所描述(us8235525b2(lesage))。先前提到的发明不包括针对边缘图像质量的设置。
10.文献wo2005098518a1(piers)描述了一种混合透镜,至少具有衍射元件,用于控制眼睛的总纵向色差。
11.文献us10010407b2(rosen)描述了一种iol设计,以改进波前的特定像差,诸如对于至多40度的角度的边缘视场的彗差或像散,但不考虑边缘图像的质量或畸变。
12.目前,市场上需要这样的人工晶状体,其在几何畸变方面,特别是在远边缘视场方面,提供与自然眼的密切对应性。
技术实现要素:
13.本发明的目的是提供一种设计和制造人工晶状体的方法,该人工晶状体类似于晶状体的成像特性,具体地,关于在视场的较远边缘中的图像的几何畸变类似于晶状体的成像特性。
14.本发明提供了一种设计和制造人工晶状体的方法,该人工晶状体包括光学部和触觉部,其中该光学部包括具有负屈光力的前表面和具有正屈光力的后表面;一旦该人工晶状体被植入眼睛内,该前表面最靠近眼睛的角膜;并且,一旦该人工晶状体被植入眼睛内,该后表面最靠近眼睛的视网膜,所述方法包括以下步骤:
[0015]-提供触觉部,
[0016]-提供光学部,并且
[0017]-将触觉部与光学部结合,
[0018]
其中,为了确定光学部的前表面的屈光力d和光学部的后表面的屈光力d',执行以下步骤:
[0019]-在自然眼上提供沿光轴以及相对于光轴具有不同角度的多条光线,
[0020]-针对每条具有角度的光线,测量眼睛的轴向长度,包括光线与眼睛的视网膜的交点,以及角膜的屈光力,
[0021]-使用对包含测量出的点的非球面表面的数学拟合,确定视网膜的形状,
[0022]-针对每个角度,计算从光轴与眼睛的视网膜的交点到光线与眼睛的视网膜的交点的弧长s,作为视网膜的形状以及光线的角度的函数,并且
[0023]-在假晶状体眼模型中使用光线追踪优化,拟合光学部的前表面的屈光力d以及光学部的后表面的屈光力d’,以在光轴上为中央视觉提供光接近,以及为每个视场角提供长度s,使得所述光接近和所述长度s像正常眼睛光接近和长度s一样。
[0024]
通过本发明的方法所制造的人工晶状体允许获得适于在中央视场中提供良好聚焦的屈光力,以及获得前部元件和后部元件之间的屈光力平衡,从而假晶状体眼的中央和边缘放大率近似于完整(自然)眼睛的中央和边缘放大率。
[0025]
从下面的详细描述中,本发明的其他特征和优点将从其目的的说明性实施例结合所附附图得出。
附图说明
[0026]
下面将参考附图,以非限制性的方式说明本发明的目的,在附图中:
[0027]
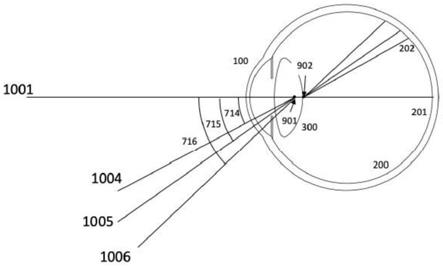
图1示出了人眼的横截面,以及在视场中心和在视场边缘具有特定角度的对象的聚焦。
[0028]
图2a示出了自然人眼的横截面,以及在视场中心和在视场边缘的对象的聚焦。
[0029]
图2b示出了假晶状体眼的横截面,即,在眼后房中植入现有技术中的人工晶状体的眼睛的横截面,以及在视场中心和在视场边缘的对象的聚焦。
[0030]
图3a示出了配备有光学系统的相机,其记录通过角膜和自然眼晶状体的眼睛视网膜的图像。
[0031]
图3b示出了配备有光学系统的相机,其记录通过角膜和人工晶状体的眼睛视网膜的图像。
[0032]
图3c示出了在图3a和图3b所示的条件下记录的视网膜图像的重叠。
[0033]
图4a示出了自然眼感知到的自然场景的图像。
[0034]
图4b示出了假晶状体眼感知到的自然场景的图像。
[0035]
图5a示出了人眼的横截面,以及在视场中心和在视场边缘具有特定角度的对象的聚焦。
[0036]
图5b示出了假晶状体眼,在后房中植入本发明的一种人工晶状体。
[0037]
图6a示出了人眼的横截面,以及在视场中心和在视场边缘中具有特定角度的对象的聚焦。
[0038]
图6b示出了假晶状体眼,在后房中植入本发明的另一种人工晶状体。
[0039]
图7示出了眼睛的横截面,以及沿光轴进入光学系统和相对于光轴形成不同角度进入光学系统的多条光线。
[0040]
图8a示出了正常眼,其将进入的光聚焦于视场的中心,而60度(视角)的场的边缘光线被聚焦在视网膜的边缘区域中。
[0041]
图8b示出了具有标准双凸人工晶状体的假晶状体眼,其将进入的光聚焦在视场的中心,而60度(视角)的场的边缘光线被聚焦于视网膜的边缘区域。
[0042]
图8c示出了具有通过本发明的方法获得的人工晶状体的假晶状体眼,其中,眼睛将进入的光聚焦于视场的中心,而60度(视角)的场的边缘光线被聚焦于视网膜的边缘区域。
[0043]
图8d示出了将人工晶状体的前表面的屈光力d用作自由参数的光线追踪分析的结果。
[0044]
图8e示出了将人工晶状体的前表面的屈光力d用作自由参数的光线追踪分析的结果。
具体实施方式
[0045]
图1示出了眼睛的横截面,其中光穿过瞳孔500进入,并穿过角膜100和眼晶状体300,被聚焦于视网膜200。节点901和902位于光轴1001上,使得沿斜轴1002的光线在角膜100和眼晶状体300中折射后到节点901,并且光线具有从第二节点902出射的方向。对于看无限远的自然人眼(远视力),这些点位于靠近眼晶状体300的后表面。在这种情况下,如果
斜轴与光轴形成角度710,则在角膜100和眼晶状体300中折射后的光的传播角度也等于该角度710。显然,节点901和902的位置,特别是第二节点902的位置,确定了在视网膜200中形成的位于特定角度710的边缘对象所处的位置202。
[0046]
图2a(现有技术)示出了自然人眼的横截面。在自然眼中,通过瞳孔500进入的光穿过角膜100和眼晶状体300,聚焦于视网膜200。位于视场中心的对象被聚焦于视网膜的中心部分201,而位于视场边缘的对象,从角度700到达,被聚焦于视网膜的边缘部分的点202。
[0047]
图2b(现有技术)示出了假晶状体眼,即,在后房植入人工晶状体iol 400的眼睛。光通过瞳孔500进入,穿过角膜100和iol 400,聚焦于视网膜200。位于视场中心的对象在视网膜的中心部分201形成图像,而位于视场边缘部分的对象,从角度700到达,被聚焦于通常与自然眼的相应点202不同的视网膜的边缘点203。
[0048]
图3a(现有技术)示出了配备有光学系统1200的相机1100,其对通过角膜100和眼晶状体300的眼睛的视网膜200的图像进行记录。视场在边缘205与206之间的眼睛的末端200的区域上延伸。视网膜中的细节2200在检测器的点1101形成图像。
[0049]
图3b(现有技术)示出了配备有光学系统1200的相机1100,其对通过角膜100和人工晶状体400的眼睛的视网膜200的图像进行记录。视场在边缘207与208之间的眼睛的末端200的更大的解剖区域上延伸。视网膜中的细节2200在检测器的点1102形成图像,该点1102通常与对应于自然眼的点1101不同。
[0050]
图3c(现有技术)示出了图3a和3b所示的情况下记录的视网膜图像的重叠。虚线对应于通过假晶状体眼记录的图像(图3b)。视网膜中的细节2200呈现出朝向图像的中心移动,并在径向方向上畸变(尺寸较小)。在图像的中心部分,黄斑2300显示尺寸的最小变化或不存在变化。
[0051]
图4a(现有技术)示出了自然眼感知到的自然场景的图像,其中一个对象位于视场的中心3000,并且边缘对象位于角度4001并具有角度尺寸4002。
[0052]
图4b(现有技术)示出了通过假晶状体眼感知到的相同图像。中心对象3000的放大率变化最小(或者不存在)。然而,边缘对象位于新感知到的视场角4003处,并且具有不同的角度尺寸4004。
[0053]
图5a示出了自然人眼的横截面。在自然眼中,通过瞳孔500进入的光穿过角膜100和眼晶状体300,聚焦于视网膜200。位于视场中心的对象被聚焦于视网膜的中心部分201,而位于视场边缘的对象,从角度700到达的对象,被聚焦于视网膜的边缘点202。
[0054]
图5b示出了假晶状体眼,在后房中植入iol 400。通过瞳孔500进入的光穿过角膜100和iol 400,聚焦于视网膜200。iol 400具有前屈光元件401和后屈光元件402。元件401和402的组合屈光力适合清晰聚焦于视网膜200。位于视场中心的对象被聚焦于视网膜的中心部分201,而位于视场边缘的对象,从角度700到达,被聚焦于视网膜的边缘部分的点203。前部元件401与后部元件402之间的屈光力的平衡使得在植入iol 400时眼睛的节点不会改变,并且视网膜中的边缘位置203非常靠近自然眼的相应点202,正如比较附5a和图5b时可以看到的。
[0055]
图6a示出了自然人眼的横截面。在自然眼中,通过瞳孔500进入的光穿过角膜100和眼晶状体300,并聚焦于视网膜200。位于视场中心的对象被聚焦于视网膜的中心部分201,而位于视场边缘部分的对象,从角度700到达,被聚焦于视网膜的边缘部分的点202。
[0056]
图6b示出了本发明的优选实施例,其中人工晶状体400包括具有负屈光力的前表面411、具有正屈光力的后表面412以及触觉部410。前部元件401(前表面411)与后部元件402(后表面412)之间的屈光力平衡使得当植入iol 400时,眼睛的节点不会变化,并且视网膜中的边缘位置203非常靠近自然眼中的相应点202。在该实施例中,即使在触觉部410如植入每个人工晶状体一样被植入晶状体囊中的情况下,iol 400的屈光力也分布在眼睛的光轴1001上,使得边缘光线畸变很小或不存在畸变。
[0057]
图7示出了眼睛的横截面,以及沿轴1001和与光轴形成不同角度714、715、716的边缘1004、1005、1006进入光学系统的多条光线。采用适当的方法,诸如光学相干断成像(oct)和角膜地形图,以在这些取向上测量眼睛的解剖学尺寸以及角膜在该轴上的屈光力。离轴生物统计数据被用于通过在数学上拟合经过测量出的点的一般非球面表面来估计视网膜的形状。组合的生物特征、地形图和屈光数据形成超定系统,该超定系统可以通过用于解决该问题的已知数学方法中的任一种来解,以获得眼睛的视网膜形状和眼睛节点。然后,对于由与视网膜的已知形状和入射光的角度相关的简单几何考虑而给出的任何视场角,可以获得在图8a中定义的距离s。眼睛前段的解剖结构被用于预测人工晶状体将被植入的手术后深度。使用眼睛的轴长测量结果以及视网膜200的形状的测量结果,以计算人工晶状体的前表面和后表面中的屈光力的适当平衡,以保持对象与图像空间之间的几何关系(s,在图8a和8c中)。该计算实质上是对多个参数的优化,这是通过光线追踪进行光学设计的领域中常见的。在这种情况下,这些参数为前屈光力和后屈光力(或者,如果晶状体材料的折射率已知,则等效为前曲率半径和后曲率半径),而优化目标包括轴上的聚焦以及针对每个视场角的图像的尺寸。如前所述,可以直接从视网膜的形状计算出所需图像的大小。
[0058]
白内障手术后,视场的边缘发生几何畸变。同样地,参考图3,这意味着通过光学仪器记录的眼睛末端的图像将发生畸变,意味着视网膜特征的位置将出现改变,并且所述特征的形状将在径向方向上受到影响。
[0059]
同样地,参照图4a和图4b,与手术之前呈现的边缘对象相比,在白内障手术之后,边缘对象将以不同的离心率呈现。除了边缘对象在边缘呈现得更远之外,它们的形状还将呈现为在径向上拉长。
[0060]
在本发明中,后房的人工晶状体(iol)设计,特别是关于视场的较远边缘中的图像的畸变,近似于自然眼晶状体的图像的几何特性。iol由用于眼内植入的诸如疏水丙烯酸、硅树脂的现有适当材料中的一种材料制成,并且可以通过机械加工或通过模塑生产。
[0061]
iol具有:中心部分,直径约为6mm,具有所需的光学特性;以及外围部分,延伸到10mm至14mm之间的直径(触觉部),一旦白内障晶状体的核和皮质被提取出,该部分有助于使iol在晶状体囊中居中并使iol稳定。晶状体触觉不属于本发明的上下文,并且选自过去50年中的科学文献中建立的设计范围。针对手术,iol被折叠并通过在眼睛的角膜缘或边缘角膜中的小切口注射到所准备的晶状体囊中。
[0062]
在iol的优选实施例中,其通过具有约1.53折射率的成型疏水性丙烯酸材料制造。参考图6b,iol的前表面411是非球面凹面,而后表面412是非球面凸面。晶状体的光学部是圆形的,并且具有约为6毫米的直径。前表面411在浸入眼睛房水中时具有负屈光力,而后表面412具有正屈光力。当浸入眼睛房水或类似的水溶液,例如盐水中时,这两个表面组合产生20d量级的屈光力。可以从各种前曲率和后曲率中选择确切的屈光力,以便基于眼睛的轴
向长度、角膜屈光力和预期的植入深度来提供有问题的眼睛的所需屈光力。这些表面中的一个或两个可以具有适当的圆锥常数,以校正角膜的球差或引入不同量的球差。具有凹陷前表面的正弯月面的形状因子导致植入囊中的晶状体的主平面在眼睛中的深度比其触觉部所定义的物理深度更大。因此,在边缘的图像的特性类似于自然眼的特性,在自然眼中,眼晶状体的后表面具有晶状体的屈光力的很大一部分,并且相对于人工晶状体通常位于更大深度处。为了进一步控制植入iol所处的功能深度,可以通过在触觉中包含2度至10度之间的量级的较小倾斜来增加iol的物理深度。
[0063]
iol的另一优选实施例是两个分开的光学元件的组合。这两个元件都是通过机械加工以及通过模具,利用折射率大约在1.46至1.55之间的疏水丙烯酸材料制造的。参考图5,iol的前部元件401是负透镜(示意性地示出),而后部元件402是正透镜(示意性地示出)。晶状体的光学部是圆形的,并且直径大约在5mm至7mm之间。这两个元件在浸入眼睛房水(或类似的水溶液,例如盐水)中时组合产生20d量级的屈光力。前部元件与后部元件之间的固定间距控制晶状体基点的位置,从而控制眼睛的节点的位置。在一个优选实施例中,这两个元件在它们的边缘接触,并且它们的间隔允许这两个元件在其植入期间被填充有水溶液。在另一个优选实施例中,两个元件相接触,并且它们的光学表面的空间间隔由它们的厚度确定。在该实施例中,调节两个元件之间的屈光力平衡以控制人工晶状体系统的基点的位置,从而控制假晶状体眼的节点的位置。在这种情况下,如在前部元件具有负屈光力并且后部元件具有正屈光力的本实施例中所指示的,人工晶状体相当于在眼睛内与其触觉部(在囊中)所定义的物理深度相比更大的深度处所植入的晶状体。因此,在边缘的图像特性类似于自然眼的边缘的图像特性,其中,自然眼的晶状体的后表面具有晶状体的屈光力的很大一部分,并且相对于人工晶状体通常位于更大深度处。
[0064]
在优选实施例中,晶状体被设计并适应于单只眼睛,就较近和较远边缘的图像特性而言是个性化的。出于此目的,并参考图7,眼睛的解剖结构使用诸如光学相干断层成像oct或特殊生物计或边缘波前传感器等适当方法来测量。眼的形状、其前段(角膜、前房、虹膜)以及其轴向长度在不同取向上测量。这些测量结合,结合在先前提到的取向上的眼睛屈光和像差的测量结果,被用于创建特定眼睛的广角光学模型。该模型被用于计算关于轴上和离轴放大率的人工晶状体的光学特性。晶状体的平均屈光力利用轴上正视眼的标准iol计算来确定。针对边缘,对将两个元件之间的屈光力平衡作为自由参数的人工晶状体的设计进行调节,使得边缘放大率符合(成比例的)完整眼睛。
[0065]
在优选的实施例中,人工晶状体由两个分开的光学元件形成。在另一个优选实施例中,人工晶状体是具有负前部屈光力和正后部屈光力的弯月面,其中,遵循先前所描述的计算来调整屈光力平衡。在另一个优选实施例中,人工晶状体具有使用来自文献的解剖学数据和屈光数据针对边缘放大率/畸变而优化的正弯月形形状。在该优选实施例中,针对普通眼睛,所得晶状体的性能将比常规的iol更好,但是其形状因子针对每只眼睛不是个性化的。
[0066]
图8a和图8d示出了人工晶状体的前表面和后表面之间的屈光力平衡如何提供对边缘对象在视网膜中的位置的控制,以及相关的光线追踪计算。
[0067]
图8a示出了正常眼,其将入射光聚焦于视场中心,而来自60度(视角)的场的边缘光线被聚焦于视网膜的边缘区域,距离光轴s处。
[0068]
图8b示出了具有标准双凸人工晶状体的假晶状体眼,其将入射光聚焦在视场的中心,而来自60度(视角)的场的边缘光线在被聚焦于视网膜的边缘区域,距离光轴通常大于s之处。
[0069]
图8c示出了具有根据本发明改进的人工晶状体的假晶状体眼,其中眼睛正将入射光聚焦在视场的中心,而来自60度(视角)的场的边缘光线被聚焦于视网膜的边缘区域,距离光轴基本等于s之处。
[0070]
在图8d中,示出了使用人工晶状体的前表面的屈光力作为自由参数的光线追踪分析的结果。针对前表面的屈光力的每个确立的参数,调整后表面的屈光力,以为沿轴入射的光提供适当的聚焦。横轴指前表面的屈光力,而纵轴表示所得的距离s的值(如图8a中所定义的)。当前表面的屈光力为负时,晶状体为弯月形(被示为mn的区域);当前屈光力为零时,晶状体为平凸形(被表示为pc);并且当前屈光力为正时,晶状体为双凸形(被示为bc的区域)。
[0071]
虚线指的是正常眼睛的典型值s,如图8a中所示。根据计算得出,为了在iol植入后保持相同的s,前表面的屈光力必须为约-17d,而后表面的屈光力必须随之增加,使得晶状体的总屈光力约为20d,这是在轴上正确聚焦所需要的。
[0072]
距离s的实际值以及iol的总屈光力将根据眼睛的解剖结构而变化。
[0073]
图8e示出了使用人工晶状体的前表面的屈光力作为自由参数的光线追踪分析的结果。针对前表面屈光力的每个确立的值,调节后表面的屈光力,以为轴上入射光提供适当的聚焦。横轴指的是前表面的屈光力,而纵轴表示为了保持光轴上的正确聚焦的iol的总屈光力。当前表面的屈光度为负时,晶状体为弯月形(被示为mn的区域);当前屈光度为零时,晶状体为平凸形(被表示为pc);并且当前表面的屈光度为正时,晶状体为双凸形(被示为bc的区域)。例如,如果所确定的眼睛需要19屈光度的双凸透镜(前屈光力等于9.5屈光度),并且弯月面被设计为保持值s恒定,则晶状体的前表面将具有-17d的屈光力(如图8d中所示),并且该弯月面的总屈光力将约为21.3屈光度。s的实际值以及iol的总屈光力将根据眼睛的解剖结构而变化。
[0074]
根据本发明的方法的另一实施例,在眼模型中实现针对每个视场角(714、715、716)计算长度s,该眼模型对应于普通生理眼睛,作为患者的眼睛的近似。
[0075]
尽管已经描绘并描述了本发明的多个实施例,但是显然可以引入其范围内的修改,并且不得将其认为是被局限于所示实施例,而仅限于所附权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。