1.本发明涉及汽车车身涂胶技术领域,尤其涉及一种涂胶定量控制装置。
背景技术:
2.在汽车车身涂胶技术主要用于ubs底部焊缝涂胶、iss车内焊缝涂胶、rpp裙边涂胶、ubc车底pvc防石击涂胶、lasd液态隔音胶涂胶、细密封涂胶以及rda车顶导水槽涂胶等场合。
3.现有技术中通常采用以下两种涂胶方式:
4.一种是采用pcf流量泵与3d胶枪结合,此种方式成本较低,但是只能精确控制胶液的流量,不能精确控制涂胶压力,无法保证涂胶质量的稳定,无法应用于涂胶稳定性要求很高的场合。
5.另一种是使用700cc定量机与3d胶枪结合,大部分均使用各自集成的系统,采用独立的控制柜,涂胶控制系统与原生机器人控制系统相互独立,彼此的兼容性较差,而且会加大上位监控程序的设计难度,涂胶控制系统与原生机器人控制系统之间的通讯效率低且功能有限,整体集成性差,而且现场额外增加涂胶控制柜以及涂胶系统的其余设备,使得整个系统庞大冗余。此外,现有技术中定量机密封圈结构复杂,难以拆卸,不便于进行设备维护。
技术实现要素:
6.基于现有技术中存在的技术问题,本发明提供一种涂胶定量控制装置,旨在解决现有技术中涂胶控制系统稳定性差、涂胶控制系统与机器人控制系统兼容性差、整体集成性差并且整个系统庞大冗余、不便于设备维护等技术问题。本发明是通过以下技术方案来实现的。
7.一种涂胶定量控制装置,包括:
8.伺服电机,加入机器人控制系统的附加轴上,受控于机器人控制系统,伺服电机的输出轴与行星减速机连接,用于驱动行星减速机;
9.行星减速机与行星滚柱丝杠连接,用于根据伺服电机的驱动从而驱动行星滚柱丝杠进行旋转运动;
10.行星滚柱丝杠螺纹连接丝杠螺母,丝杠螺母安装在螺母安装座上;
11.螺母安装座上还固定安装有胶缸活塞,胶缸活塞的活塞头部件深入胶缸的内腔中;
12.行星滚柱丝杠用于将旋转运动转化为丝杠螺母在行星滚柱丝杠的轴向方向做的直线往复运动,丝杠螺母的直线往复运动带动螺母安装座和胶缸活塞做轴向方向的直线往复运动,从而控制胶缸中胶液的流入和流出。
13.进一步的,包括丝杠腔体,丝杠腔体的左端安装在第一固定机构上,丝杠腔体的右端安装在第二固定机构上;
14.胶缸,胶缸的左端安装在第二固定机构上;
15.其中,丝杠螺母和螺母安装座位于丝杠腔体内。
16.进一步的,包括轴联箱体,行星减速机安装在轴联箱体的左端;轴联箱体的右端与第一固定机构连接且一体成型;
17.轴联箱体内部设有联轴器,行星减速机与行星滚柱丝杠通过联轴器连接;
18.轴联箱体内部还设有套设在行星滚柱丝杠外周的轴承组件,轴承组件用于将行星滚柱丝杠转动安装于轴联箱体上。
19.进一步的,螺母安装座上套设有至少两根导向杆,导向杆的左端固定在轴联箱体的右端,导向杆的右端固定在第二固定机构上;
20.导向杆设于丝杠腔体内部,用于将丝杠螺母、螺母安装座和胶缸活塞限定在轴向方向做直线往复运动。
21.进一步的,胶缸活塞的外周设有密封导向环组件,密封导向环组件位于行星滚柱丝杠的右端,密封导向环组件包括:
22.密封座,密封座安装在第二固定机构上;
23.密封座的内圈分别嵌有第一导向环、第二导向环以及斯特封,斯特封位于第一导向环、第二导向环之间;
24.密封座的外圈嵌有第一密封圈。
25.进一步的,第二固定机构上还分别设有第一冒口和第二冒口,
26.第一冒口和第二冒口位于胶缸左端端面;
27.第一冒口,用于当存在胶液渗漏的现象发生时,作为胶液渗漏的流出通道,并在更换塑化剂时,作为原有塑化剂的排出通道。
28.第二冒口,用于作为新注入塑化剂的注入通道,为活塞头部件提供塑化剂。
29.进一步的,胶缸右端设有胶缸端盖,胶缸端盖中设有进胶通道和出胶通道、胶缸通道,进胶通道和出胶通道分别与胶缸通道连通;
30.胶缸通道上设有压力传感器,压力传感器对流入和流出的胶液压力进行检测;
31.压力传感器受控于机器人控制系统,将检测的胶液压力数据反馈给机器人控制系统,机器人控制系统根据胶液压力数据控制伺服电机的转矩,实时调整进出胶液的压力。
32.进一步的,在丝杠腔体内部轴联箱体面向丝杠螺母的右端面设有第一防撞块;
33.在丝杠腔体内部第二固定机构面向丝杠螺母的左端面上设有第二防撞。
34.进一步的,丝杠腔体上还设有接近传感器。
35.进一步的,胶缸的左端与第二固定机构固定连接且胶缸与第二固定机构相接触的接触面上嵌设有第二密封圈。
36.进一步的,
37.胶缸右端与胶缸端盖固定连接且胶缸右端在与胶缸端盖相接触的接触面上嵌设有第三密封圈。
38.进一步的,包括八根连接杆,位于丝杠腔体的外部;
39.连接杆的左端固定安装在第一固定机构上,连接杆的右端固定安装在第二固定机构的上;
40.八根连接杆以两根为一组,均分成四组,四组连接杆(5)均匀分散在所述丝杠腔体四周的棱边并与对应的棱边相邻。
41.本发明的有益技术效果是:
42.将涂胶流量和压力作为可控项进行精确控制,提高涂胶质量和涂胶稳定性。将涂胶定量控制装置集成在机器人控制系统中,将涂胶定量控制装置作为机器人的附加轴,涂胶过程中各个工艺参数受控于机器人控制系统,采用机器人上位机进行监控,简化控制系统,实现统一控制,并且参数可视化程度高。
附图说明
43.图1为本发明的涂胶定量控制装置的整体结构示意图。
44.图2为本发明的涂胶定量控制装置的整体结构正视图。
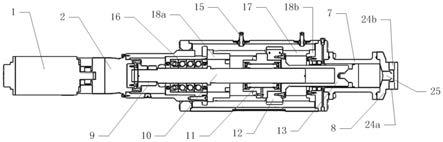
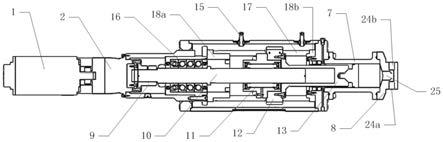
45.图3为本发明的涂胶定量控制装置的部分结构剖面示意图。
46.图4为本发明的涂胶定量控制装置的轴联箱体和第一固定机构的一体成型示意图;
47.图5为本发明的涂胶定量控制装置的螺母安装座示意图。
48.图6为本发明的涂胶定量控制装置的滚柱丝杠右端和第二固定机构局部剖面示意图。
49.图7为本发明的涂胶定量控制装置的胶缸局部剖面示意图。
50.图8为本发明的涂胶定量控制装置的胶缸端盖示意图。
51.图9为本发明的涂胶定量控制装置的接近传感器和防撞块位置示意图。
52.图10为本发明的涂胶定量控制装置的丝杠腔体示意图。
具体实施方式
53.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有作出创造性劳动的前提下所获得的所有其他实施例,都属于本发明保护的范围。
54.需要说明的是,在不冲突的情况下,本发明中的实施例及实施例中的特征可以相互组合。
55.下面结合附图和具体实施例对本发明作进一步说明,但不作为本发明的限定。
56.如图1-3所示,本发明提供一种涂胶定量控制装置,包括:
57.伺服电机(1),加入机器人控制系统的附加轴上,受控于机器人控制系统,伺服电机(1)的输出轴与行星减速机(2)连接,用于驱动行星减速机(2);
58.行星减速机(2)与行星滚柱丝杠(10)连接,用于根据伺服电机(1)的驱动从而驱动行星滚柱丝杠(10)进行旋转运动;
59.行星滚柱丝杠(10)螺纹连接丝杠螺母(11),丝杠螺母(11)安装在螺母安装座(12)上;
60.螺母安装座(12)上还固定安装有胶缸活塞(13),胶缸活塞(13)的活塞头部件深入胶缸(7)的内腔中;
61.行星滚柱丝杠(10)用于将伺服电机(1)的旋转运动转化为丝杠螺母(11)在行星滚柱丝杠(10)的轴向方向做的直线往复运动,丝杠螺母(11)的直线往复运动带动螺母安装座
(12)和胶缸活塞(13)做轴向方向的直线往复运动,从而控制胶缸(7)中胶液的流入和流出。
62.在本发明中,伺服电机(1)输出轴的旋转运动经行星减速机(2)带动行星滚柱丝杠(10)旋转,行星滚柱丝杠(10)将伺服电机(1)的旋转运动转化成丝杠螺母(11)的直线运动,伺服电机(1)的运动方向改变丝杠螺母(11)的运动方向,控制伺服电机(1)的运动方向便可控制丝杠螺母(11)的运动方向,从而控制丝杠螺母(11)做直线往复运动。
63.丝杠螺母(11)和胶缸活塞(13)均安装在螺母安装座(12)上,丝杠螺母(11)的往复运动带动胶缸活塞(13)做往复运动,当丝杠螺母(11)向右方向做直线运动时,带动胶缸活塞(13)向右直线运动,胶缸活塞(13)的活塞头部件对胶缸(7)中的胶液不断施加压力从而将胶液挤出,即控制胶液的流出。当丝杠螺母(11)向左方向做直线运动时,带动胶缸活塞(13)向左直线运动,胶缸(7)内产生负压将胶液吸入胶缸(7)内,即控制胶液的流入。
64.伺服电机(1)与机器人控制系统连接,受机器人控制系统控制,机器人控制系统精确控制伺服电机(1)的位置和转速,从而达到对胶液流量精确控制的目的,机器人控制系统实时监控伺服电机(1)的扭矩以及压力传感器(28)的实时反馈数据,从而达到对胶液压力精确控制的目的。
65.本发明采用行星滚柱丝杠(10),在承受同等扭力的的情况下体积仅是普通的滚珠丝杠的三分之一左右,相较于普通的滚珠丝杠,满足使用扭矩的要求下,可以大幅度降低系统体积。
66.本发明中丝杠螺母(11)可为法兰式螺母,根据法兰式螺母设计对应的法兰式螺母安装座,避免在丝杠螺母(11)在做直线式往复运动中出现轴向和径向的窜动。
67.活塞头部件采用高强度的高分子材料,与胶缸(7)内壁紧密接触,保证密封性同时起到刮胶作用,并能经受长期与胶缸(7)内壁和胶液内玻璃微珠的摩擦,提高活塞头部件的使用寿命。
68.参见图1-3,进一步的,包括丝杠腔体(4),丝杠腔体(4)的左端安装在第一固定机构(6a)上,丝杠腔体(4)的右端安装在第二固定机构(6b)上;
69.胶缸(7),胶缸(7)的左端安装在第二固定机构(6b)上;
70.其中,丝杠螺母(11)和螺母安装座(12)位于丝杠腔体(4)内。
71.参见图1-2和图4,进一步的,包括轴联箱体(3),行星减速机(2)安装在轴联箱体(3)的左端,轴联箱体(3)的右端与第一固定机构(6a)连接且一体成型;
72.轴联箱体(3)内部设有联轴器(9),行星减速机(2)与行星滚柱丝杠(10)通过联轴器(9)连接;
73.轴联箱体(3)内部还设有套设在行星滚柱丝杠(10)外周的止推轴承(16),轴承组件(16)用于将行星滚柱丝杠(10)转动安装于轴联箱体(3)上。
74.在本发明中,轴承组件(16)为角接触球轴承组件,可以保证行星滚柱丝杠(10)在高压状态下正常运行,本发明中行星滚柱丝杠(10)可以承受的最高工作压力为22mpa,可以承受的最大瞬时压力为33mpa。
75.参见图3-4,进一步的,螺母安装座(12)上套设有至少两根导向杆(17),导向杆(17)的左端固定在轴联箱体(3)的右端,导向杆(17)的右端固定在第二固定机构(6b)上;
76.导向杆(17)设于丝杠腔体(4)内部,用于将丝杠螺母(11)、螺母安装座(12)和胶缸活塞(13)限定在轴向方向做直线往复运动。
77.优选的,导向杆(17)为三根。
78.导向杆(17)在丝杠螺母(11)的轴向运动过程中起到导向作用,可以避免丝杠螺母(11)发生旋转导致轴向定位不准而影响胶液的流量。
79.参见图5,进一步的,胶缸活塞(13)的外周设有密封导向环组件,密封导向环组件位于行星滚柱丝杠(10)的右端,密封导向环组件包括:
80.密封座(22),密封座(22)安装在第二固定机构(6b)上;
81.密封座(22)的内圈分别嵌有第一导向环(19a)、第二导向环(19b)以及斯特封(20),斯特封(20)位于第一导向环(19a)、第二导向环(19b)之间;
82.密封座(22)的外圈嵌有第一密封圈(21)。
83.优选的,第一导向环(19a)、第二导向环(19b)和斯特封(20)均为ptfe(聚四氟乙烯)材质。第一密封圈(21)为fkm(氟橡胶)材质。
84.密封导向环组件一方面起到对行星滚柱丝杠(10)和胶缸活塞(13)的支撑作用,可以避免行星滚柱丝杠(10)悬臂部分过长导致在运动过程中产生震动,扩展到丝杠螺母(11)、螺母安装座(12)和胶缸活塞(13)等多个零部件震动,提高行星滚柱丝杠(10)等零部件的使用寿命,有助于维持行星滚柱丝杠(10)的旋转运动,丝杠螺母(11)、螺母安装座(12)和胶缸活塞(13)的直线运动,维持胶液流量的稳定性。另一方面还起到对胶缸活塞(13)的密封作用,避免发生漏胶时胶液以及塑化剂扩散道整个丝杠腔体(4)内部。
85.胶缸活塞(13)在运动过程中与密封座(22)内圈的第一导向环(19a)和第二导向环(19b)、斯特封(20)存在持续摩擦,使得第一导向环(19a)和第二导向环(19b)、斯特封(20)均容易受损,属于易损件,因此需定期更换第一导向环(19a)和第二导向环(19b)、斯特封(20),为了降低更换难度,将第一导向环(19a)和第二导向环(19b)、斯特封(20)均安装在密封座(22)上,第一导向环(19a)和第二导向环(19b)、斯特封(20)需要更换时,直接更换密封座(22),极大的缩小了更换时间,有利于设备维护。
86.参见图5,进一步的,第二固定机构(6b)上还分别设有第一冒口(23a)和第二冒口(23b),
87.第一冒口(23a)和第二冒口(23b)位于胶缸(7)左端端面;
88.第一冒口(23a),用于当存在胶液渗漏的现象发生时,作为胶液渗漏的流出通道,且在更换塑化剂时,作为原有塑化剂的排出通道。
89.第二冒口(23b),用于作为新注入塑化剂的注入通道,为活塞头部件提供塑化剂。
90.具体的,活塞头部件为活塞头密封部件。
91.塑化剂通过第二冒口(23b)进入对活塞头部件起到润滑作用。第二冒口(23b)的端部插设有冒盖,不使用时盖上冒盖。
92.第一冒口(23a)用于检测是否有漏胶现象发生,当存在漏胶现象时,胶液从第一冒口(23a)流出,方便工作人员尽早发现漏胶情况,及时更换活塞头部件。具体的,活塞头部件为活塞头密封部件。
93.参见图2-3和图7,进一步的,胶缸(7)右端设有胶缸端盖(8),胶缸端盖(8)中设有进胶通道(24a)和出胶通道(24b)、胶缸通道,进胶通道(24a)和出胶通道(24b)分别与胶缸通道(25)连通;
94.胶缸通道(25)上设有压力传感器(28),压力传感器(28)对流入和流出的胶液压力
进行检测。
95.压力传感器(28)受控于机器人控制系统,将检测的胶液压力数据反馈给机器人控制系统,机器人控制系统根据胶液压力数据控制伺服电机(1)的转矩,实时调整所述进出胶液的压力。
96.胶液的流入和流出经过胶缸通道(25),即经过同一个管口,降低装置的体积和结构设计上的复杂度。进一步的,胶液的流入和流出可以是先入后出的方式。
97.胶缸通道(25)上设置压力传感器(28),使用同一个压力传感器便可对胶液的流入和流出压力进行监控并反馈给机器人控制系统,方便机器人控制系统做出决策控制胶液压力。
98.参见图8,进一步的,在所述丝杠腔体(4)内部所述轴联箱体(3)上面向所述丝杠螺母(11)的右端面设有第一防撞块(18a);
99.在所述丝杠腔体(4)内部第二固定机构(6b)上面向丝杠螺母(11)的左端面上设有第二防撞块(18b)。
100.第一防撞块(18a)和第二防撞块(18b)保证丝杠螺母(11)和轴承组件(16)之间、丝杠螺母(11)和第二固定机构(6b)之间发生碰撞时出现损坏现象。
101.优选的,第一防撞块(18a)和第二防撞块(18b)为环状结构,环绕在行星滚柱丝杠(10)外侧。
102.进一步的,丝杠腔体(4)上还设有接近传感器(15)。
103.接近传感器(15)至少为两个,与机器人控制系统连接,检测是否有物体靠近,接近传感器(15)受控于机器人控制系统,机器人控制系统根据接近传感器(15)采集的接近数据判断是否有异物接近丝杠腔体。有物体靠近时产生预警,方便工作人员及时了解情况,保证装置的安全。
104.参见图3、图5和图6,进一步的,胶缸(7)的左端与所述第二固定机构(6b)固定连接且所述胶缸(7)与第二固定机构(6b)相接触的接触面上嵌设有第二密封圈(27a)。
105.进一步的,所述胶缸(7)右端与所述胶缸端盖(8)固定连接且所述胶缸(7)右端在与所述胶缸端盖(8)相接触的接触面上嵌设有第三密封圈(27b)。
106.第二密封圈(27a)和第三密封圈(27b)进一步防止胶液渗漏。
107.胶缸(7)采用高强度的不锈钢材料且内壁镀类金刚石涂层,耐磨性高,可以长期经受活塞头部件以及胶液中玻璃微珠的高强度反复摩擦,不会出现磨损而产生金属粉尘影响胶液质量,并且可以提高胶缸(7)的使用寿命。
108.第二密封圈(27a)和第三密封圈(27b)的材质可以选择fkm(氟橡胶)材质。
109.参见图9,进一步的,在丝杠腔体(4)上还设有观察窗口(14),可以通过观察窗口(14)观察丝杠腔体(4)内部情况,例如观察丝杠螺母(11)的当前位置,以及丝杠螺母(11)和导向杆(17)等部件的润滑情况,便于工作人员进行调试和设备维护。
110.参见图2,进一步的,具有多根连接杆(5),
111.包括多根连接杆(5),位于丝杠腔体(4)的外部,连接杆(5)的左端固定安装在第一固定机构(6a)上,连接杆(5)的右端固定安装在第二固定机构(6b)的上,提高丝杠腔体(4)的稳固性;
112.优选的,连接杆(5)具有8根。
113.八根连接杆(5)以两根为一组,均分成四组,四组连接杆(5)分别位于丝杠腔体(4)外部且均匀分散在所述丝杠腔体四周的棱边并与对应的棱边相邻。将连接杆(5)设置在丝杠腔体(4)外部四周棱边上,避免遮挡和影响丝杠腔体(4)的观察窗口(14)、接近传感器(15)等部件。
114.优选的,连接杆(5)总数是4根,均匀分散在所述丝杠腔体四周的棱边并与对应的棱边相邻。
115.8根连接杆(5)的设置相对于4根连接杆(5)更加稳固。
116.连接杆(5)的设置在保证装置连接稳固性的同时尽可能做到装置拆卸方便,便于装置的维护和易损零件的更换。
117.在本发明中,胶缸部分和其前端的驱动部分彼此独立设置,互不接触,拆卸方便,便于装置的维护和易损件例如密封导向环组件的更换。
118.在本发明中,伺服电机(1)与机器人控制系统连接,受机器人控制系统驱动。机器人控制系统可以同时控制32根轴,每根轴即一个伺服电机,机器人本体通常具有6个机械臂,使用6根轴,其余轴可以作为附加轴或者工艺轴,机器人控制系统可以对机器人本体的6个机械臂以及附加轴或者工艺轴进行协同控制。本发明伺服电机(1)与机器人控制系统连接,受机器人控制系统驱动,伺服电机(1)作为附加轴集成到机器人控制系统的机器人控制柜中,由机器人控制系统进行统一控制。机器人控制系统中的机器人控制柜无需做大幅度变动。无需额外的独立的控制柜对涂胶定量控制装置进行控制。减少整个控制系统的零部件,缩小整个控制系统的体积,机器人控制系统中的机器人控制器可以直接读取伺服电机(1)的扭矩、转速等参数,可以更加灵活更加精确的控制胶液流量和压力。控制涂胶定量控制装置的编程软件集成在机器人控制系统中,共用机器人示教机,可以对胶液流量、压力、胶缸内胶液剩余量以及喷嘴当前位置等关键工艺参数进行实时监控,利于对关键工艺参数的精确控制和调节。解决现有技术中机器人示教机和定量机示教机独立设置导致工艺参数无法共享,不方便调试的技术问题。
119.以上仅为本发明较佳的实施例,并非因此限制本发明的实施方式及保护范围,对于本领域技术人员而言,应当能够意识到凡运用本发明说明书及图示内容所作出的等同替换和显而易见的变化所得到的方案,均应当包含在本发明的保护范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。