1.本发明涉及具备处置对象容器的容器处置装置和控制容器处置装置的动作的控制部的容器处置设备。
背景技术:
2.在日本特开2000
‑
62913号公报(专利文献1)中,公开了具备输送货物的自行台车和控制自行台车的动作的控制装置的自行台车系统。在专利文献1的自行台车系统中,以如果不论货物的种类等如何都总是将自行台车的加减速度设为一定则在输送中货物翻倒等作为课题,为了解决该课题,在控制装置设有用来设定自行台车的加减速度的加减速度设定机构。
技术实现要素:
3.顺便说一下,专利文献1所记载的课题在具备处置对象容器的容器处置装置和控制容器处置装置的动作的控制部的容器处置设备中也可能发生。因此,例如在容器处置装置进行在支承着对象容器的状态下沿着移动路径移动的移动动作的情况下,可以考虑根据收容于对象容器的货物的种类设定移动动作的动作速度(不仅是速度自身,还包括设定加减速度等与速度有关的物理量)。但是,由于容器处置装置进行的动作并不限于移动动作,所以仅通过这样构成,有收容于对象容器的货物的保护变得不充分的可能。但是,在专利文献1中没有关于这一点的记载。
4.所以,希望实现能够适当地保护收容于对象容器的货物的容器处置设备。
5.有关本公开的容器处置设备具备:容器处置装置,处置对象容器;控制部,控制前述容器处置装置的动作;在前述对象容器,收容对象基板,所述对象基板是至少厚度不同的多个种类的基板中的某个种类的基板;前述容器处置装置构成为,进行对象动作,所述对象动作是在支承着前述对象容器的状态下沿着移动路径移动的移动动作、使前述对象容器升降的升降动作、使前述对象容器绕沿着上下方向的轴心旋转的回转动作和使前述对象容器朝向前述对象容器的移载对象部位移动的移载动作中的至少两个动作;前述控制部构成为,能够对于前述对象动作的各自,按照收容于前述对象容器的前述对象基板的种类而设定不同的动作速度。
6.在本结构中,由于被收容于容器处置装置处置的对象容器的货物是基板,所以根据容器处置装置的动作速度,有因对象容器的振动、风压而基板晃动或浮起的可能。而且,在本结构中,由于被收容于对象容器的基板(对象基板)是至少厚度不同的多个种类的基板中的某个种类的基板,所以基板的晃动、浮起的发生容易度可能根据基板的种类而不同。根据本结构,能够对于作为移动动作、升降动作、回转动作及移载动作中的至少两个动作的对象动作的各自,按照收容于对象容器的对象基板的种类而设定不同的动作速度。由此,能够根据对象基板的每个种类的厚度、形状等适当地设定关于对象动作的各自的适当的动作速度,以使得不易发生对象基板的晃动、浮起。通过这样不是仅对于容器处置装置的一个动
作、而是对于两个以上的动作的各自进行对象基板的每个种类的动作速度的设定,能够有效地抑制对象基板的晃动、浮起的发生,适当地保护对象基板。如以上这样,根据本结构,能够适当地保护作为收容于对象容器的货物的基板。
7.容器处置设备的更多的特征和优点,根据关于参照附图说明的实施方式的以下的记载变得明确。
附图说明
8.图1是表示容器处置设备的一例的俯视图。
9.图2是表示容器处置设备的一例的侧视图。
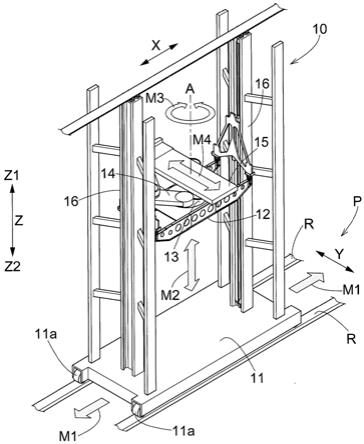
10.图3是表示容器处置装置的一例的立体图。
11.图4是控制框图。
12.图5是表示容器处置设备的另一例的俯视图。
13.图6是表示容器处置装置并行进行多个对象动作的状况的图。
14.图7是表示对象容器以与对象姿势不同的姿势被容器处置装置支承的状态的图。
15.图8是表示对象容器以对象姿势被容器处置装置支承的状态的图。
具体实施方式
16.参照附图对容器处置设备的实施方式进行说明。
17.如图1、图2及图4所示,容器处置设备100具备处置对象容器30的容器处置装置10和控制容器处置装置10的动作的控制部40。对象容器30是收容对象基板2的容器。在本实施方式中,容器处置设备100例如被用于制造有机el(electro luminescence;电致发光)显示器等显示器的设备。而且,在本实施方式中,对象基板2是被用于显示器的玻璃基板。另外,对象基板2既可以是被用于其他用途的玻璃基板,也可以是玻璃基板以外的基板(例如,半导体基板、印刷电路基板等)。即,容器处置设备100也可以被用于制造显示器的设备以外的设备。
18.容器处置装置10构成为,进行作为移动动作m1、升降动作m2、回转动作m3和移载动作m4中的至少两个动作的对象动作(参照图3)。这里,移动动作m1是在支承着对象容器30的状态下沿着移动路径p移动的动作,升降动作m2是使对象容器30升降的动作,回转动作m3是使对象容器30绕沿着上下方向z的轴心a旋转的动作,移载动作m4是使对象容器30朝向对象容器30的移载对象部位1移动的动作。另外,移动路径p并不限于由轨道等形成,也可以假想地设定。在本实施方式中,容器处置装置10构成为,进行移动动作m1、升降动作m2、回转动作m3及移载动作m4的全部。即,在本实施方式中,移动动作m1、升降动作m2、回转动作m3及移载动作m4的全部被作为对象动作。在本实施方式中,这些移动动作m1、升降动作m2、回转动作m3及移载动作m4在由支承体15支承着对象容器30的状态下进行。
19.在本实施方式中,容器处置装置10是沿着沿地面的移动路径p移动而输送对象容器30的输送装置。具体而言,如图1~图3所示,容器处置装置10是堆垛起重机,具备行驶台车11、升降体12、回转台13和移载装置14。容器处置装置10的移动路径p由设置于地面的行驶轨道r形成,行驶台车11具备在行驶轨道r上滚动的行驶轮11a。在本实施方式中,行驶轨道r以沿着后述的横宽方向x延伸的方式设置。容器处置装置10具备驱动行驶轮11a的行驶
用马达21(驱动力源的一例,参照图4),通过由行驶用马达21将行驶轮11a驱动、使行驶台车11沿着行驶轨道r行驶,进行移动动作m1。如图3所示,在移动动作m1中,包括容器处置装置10向移动路径p的长度方向(这里是横宽方向x)的一方侧移动的动作和容器处置装置10向移动路径p的长度方向的另一方侧移动的动作。
20.升降体12沿着立设于行驶台车11的桅杆16升降。容器处置装置10具备用来使升降体12升降的升降用马达22(驱动力源的一例,参照图4),通过将升降用马达22驱动、使升降体12升降,进行升降动作m2。例如可以做成以下的结构:通过由升降用马达22使卷绕着一端与升降体12连结的钢丝绳(wire)等绳状体的滚筒旋转、将绳状体卷取或抽出,使升降体12升降。
21.回转台13能够绕轴心a旋转地被升降体12支承。容器处置装置10具备用来使回转台13相对于升降体12绕轴心a旋转的回转用马达23(驱动力源的一例,参照图4),通过将回转用马达23驱动、使回转台13旋转,进行回转动作m3。
22.移载装置14被回转台13支承。移载装置14构成为,使支承对象容器30的支承体15在水平方向(这里是后述的进深方向y)上伸出后退移动(向靠近移载对象部位1的一侧的伸出移动以及向远离移载对象部位1的一侧的后退移动)。容器处置装置10具备用来使支承体15伸出后退移动的移载用马达24(驱动力源的一例,参照图4),通过将移载用马达24驱动、使支承体15伸出后退移动,进行移载动作m4。
23.在本实施方式中,容器处置装置10通过在由移载装置14使支承体15向靠近移载对象部位1的一侧伸出移动的状态(即,使支承体15从升降体12向靠近移载对象部位1的一侧突出的状态)下、使升降体12升降、使支承体15(具体而言,包括支承体15的移载装置14的整体)升降,将对象容器30在支承体15与移载对象部位1之间移载。具体而言,容器处置装置10通过在使支承体15向靠近移载对象部位1的一侧突出的状态下使升降体12上升,将被置于移载对象部位1的对象容器30用支承体15抄取,通过在使支承体15向靠近移载对象部位1的一侧突出的状态下使升降体12下降,将被支承体15支承的对象容器30向移载对象部位1卸下。
24.在本实施方式中,移载装置14构成为,使用具备臂的连杆机构使支承体15在水平方向上伸出后退移动,但并不限于此,例如也可以做成移载装置14使用滑动机构(直线运动机构)使支承体15在水平方向上伸出后退移动的结构。此外,在本实施方式中,支承体15构成为,将对象容器30从下侧z2(上下方向z的下侧)支承,但并不限于此,例如可以做成支承体15将对象容器30从上侧z1(上下方向z的上侧)支承的结构,或做成支承体15将对象容器30从水平方向的两侧夹持的结构。
25.如图1及图2所示,在本实施方式中,容器处置设备100具备收纳对象容器30的收纳搁架50。收纳搁架50具备多个收纳对象容器30的收纳部51。这里,多个收纳部51在横宽方向x(水平方向)上配置有多列,并且在上下方向z(铅直方向)上配置有多层。这里,横宽方向x是与收纳搁架50的进深方向y(水平方向)正交的方向。容器处置装置10的移动路径p相对于收纳搁架50形成在前表面侧y1(进深方向y的一方侧),容器处置装置10相对于作为移载对象部位1的收纳部51从前表面侧y1移载对象容器30。即,容器处置装置10通过在使支承体15向背面侧y2(进深方向y的另一方侧)突出的状态下使升降体12升降,在支承体15与收纳部51之间移载对象容器30。
26.在本实施方式中,收纳搁架50以之间夹着移动路径p在进深方向y上对置的方式设置有一对。在本实施方式中,如上述那样,回转台13被设置于容器处置装置10,通过借助回转台13的旋转切换由移载装置14带来的支承体15的突出方向,对于一对收纳搁架50的哪个收纳部51都能够移载对象容器30。
27.如图1及图2所示,对象容器30构成为,将对象基板2以沿着水平面的姿势(水平姿势)收容。此外,对象容器30构成为能够收容多片对象基板2。具体而言,对象容器30构成为能够将沿着水平面的姿势的多片对象基板2在上下方向z上排列而收容。在本实施方式中,对象容器30构成为,将对象基板2从下侧z2支承。即,对象容器30具备将对象基板2从下侧z2支承的支承部。此外,在本实施方式中,对象容器30被做成具备开口部的开放盒。具体而言,对象容器30将框材组合而构成。在本实施方式中,由于对象基板2是玻璃基板,所以作为对象容器30,可以使用后撑型的盒、线材盒(wire cassette)等各种类型的玻璃基板用盒。
28.容器处置装置10进行的各动作受到控制部40的控制而进行。控制部40具备cpu等运算处理装置并具备存储器等周边电路,通过这些硬件与在运算处理装置等的硬件上执行的程序的协作,实现控制部40的各功能。如图4所示,在本实施方式中,控制部40与容器处置装置10另外设置,在容器处置装置10设有设备控制器,所述设备控制器根据来自控制部40的指令对容器处置装置10的动作进行控制。即,控制部40经由设在容器处置装置10的设备控制器,对容器处置装置10的动作进行控制。另外,也可以做成控制部40设于容器处置装置10的结构。在本说明书中公开的控制部40的技术特征对于容器处置设备100的容器处置装置10的控制方法也能够应用,在本说明书中也公开了容器处置装置10的控制方法。
29.控制部40通过对行驶用马达21的驱动进行控制,使容器处置装置10进行移动动作m1,通过对升降用马达22的驱动进行控制,使容器处置装置10进行升降动作m2,通过对回转用马达23的驱动进行控制,使容器处置装置10进行回转动作m3,通过对移载用马达24的驱动进行控制,使容器处置装置10进行移载动作m4。
30.在使容器处置装置10进行对象容器30相对于移载对象部位1(例如收纳部51)的移载动作的情况下,控制部40使容器处置装置10进行移动动作m1及升降动作m2,以将移载装置14(支承体15)配置到与移载对象部位1对应的位置,并且根据需要使容器处置装置10进行回转动作m3。具体而言,控制部40使容器处置装置10进行移动动作m1,以使容器处置装置10(具体而言,行驶台车11)移动到与移载对象部位1对应的水平方向(这里是横宽方向x)的位置,并且使容器处置装置10进行升降动作m2,以使移载装置14(支承体15)升降到与移载对象部位1对应的上下方向z的位置。此外,控制部40根据需要,使容器处置装置10进行回转动作m3,以使由移载装置14带来的支承体15的突出方向成为朝向移载对象部位1的方向。
31.而且,控制部40通过使容器处置装置10进行移载动作m4以使支承体15向靠近移载对象部位1的一侧(这里是背面侧y2)突出,使对象容器30在支承体15与移载对象部位1之间移载。在本实施方式中,控制部40通过在使容器处置装置10进行移载动作m4以使支承体15向靠近移载对象部位1的一侧突出后、使容器处置装置10进行升降动作m2以使支承体15上升或下降,使对象容器30在支承体15与移载对象部位1之间移载。
32.在对象容器30中,收容对象基板2,所述对象基板2是至少厚度不同的多个种类的基板中的某个种类的基板。即,对象容器30构成为,能够将至少厚度不同的多个种类的基板作为对象基板2收容。基板的厚度的种类例如与将基板的厚度范围分割为多个的情况下的
分割区域对应。例如,在基板的厚度范围被分割为四个区域(分割区域)的情况下,基板的厚度的种类被分类为四个。在本实施方式中,多个种类的基板都是玻璃基板(具体而言,组成及化学构造相互相等或同等的玻璃基板),俯视(沿着基板的厚度方向的方向观察)下的形状及大小也成为相互相等。因此,对象基板2被设为仅厚度不同的多个种类的基板中的某个种类的基板。另外,也可以做成以下的结构:对象基板2被设为除了厚度以外还有其他要素(俯视下的形状、俯视下的大小、组成、化学构造等)不同的多个种类的基板中的某个种类的基板。
33.由于在对象容器30中收容对象基板2,所以根据容器处置装置10的动作速度,有因对象容器30的振动、对象基板2受到的风压而对象基板2晃动或浮起的可能。而且,这样的对象基板2的晃动、浮起的发生容易度可能根据对象基板2的种类而不同。鉴于这一点,控制部40构成为,能够对于对象动作的各自(在本实施方式中,对于移动动作m1、升降动作m2、回转动作m3及移载动作m4的各自),按照收容于对象容器30的对象基板2的种类而设定不同的动作速度。控制部40对容器处置装置10进行控制,以使其以设定的动作速度进行对象动作。在本实施方式中,控制部40构成为,能够对于对象动作的各自,按照收容于对象容器30的对象基板2的厚度的种类而设定不同的动作速度。由此,能够有效地抑制对象基板2的晃动。在本实施方式中,控制部40还构成为,对于对象动作的各自,根据支承体15是否支承着对象容器30而设定不同的动作速度。
34.另外,控制部40只要构成为能够对于对象动作的各自按照对象基板2的种类设定不同的动作速度就可以,也可以并不一定对于全部的对象动作都按照对象基板2的种类设定不同的动作速度。在本实施方式中,控制部40构成为,对于对象动作的各自,按照对象基板2的种类设定不同的动作速度。此外,“设定动作速度”,是不仅设定动作的速度自身、还包括设定与动作的速度有关的物理量(例如加减速度)的概念。在本实施方式中,设定动作的速度自身。而且,动作的加减速度例如使用固定值,或使用基于加减速期间和设定的速度导出的值。
35.控制部40构成为,基于存储于存储部(未图示)的关于对象动作的各自的动作速度,设定关于对象动作的各自的动作速度。在控制部40参照的该存储部,关于对象动作的各自,将由作业者或自动设定的动作速度与对象基板2的种类(这里是对象基板2的厚度的种类)建立关联而存储。动作速度例如以绝对值设定,或者以相对于成为基准的速度(例如额定速度)的比例(速度比例)设定。在关于某个对象动作而在存储部存储有按照对象基板2的种类而不同地设定的动作速度的情况下,控制部40对于该对象动作,按照对象基板2的种类而设定不同的动作速度。
36.如图4所示,在本实施方式中,控制部40从作为该控制部40的上位的控制部的上位控制部41取得在成为处置的对象的对象容器30收容的对象基板2的种类的信息(这里是对象基板2的厚度的信息或对象基板2的厚度的种类的信息)。具体而言,上位控制部41将关于成为输送的对象的对象容器30的输送源的包括移载对象部位1的位置(即,对象容器30的当前位置)的信息、输送目的地的移载对象部位1的位置的信息和收容的对象基板2的种类的信息的输送数据向控制部40发送。控制部40从输送数据取得收容于对象容器30的对象基板2的种类的信息。控制部40对容器处置装置10的动作进行控制,以使其进行与从上位控制部41接收到的输送数据对应的对象容器30的输送处理。具体而言,控制部40对容器处置装置
10的动作进行控制,以将对象容器30从输送源的移载对象部位1向支承体15移载,将该对象容器30从支承体15向输送目的地的移载对象部位1移载。
37.随着基板的厚度变小,一般变得容易发生基板的晃动、浮起。考虑这一点,例如优选的是构成为,控制部40以随着对象基板2的厚度变小而变低的方式设定关于对象动作的各自的动作速度。在此情况下,在控制部40参照的存储部,关于对象动作的各自,存储有以随着对象基板2的厚度变小而变低的方式设定的动作速度。
38.有容器处置装置10构成为能够将大小(至少一个方向的尺寸)不同的多个种类的容器作为对象容器30处置的情况。图5表示这样的结构的一例,在图5所示的例子中,容器处置装置10构成为,将大小不同的两种容器作为对象容器30处置。在图5所示的例子中,容器处置装置10构成为,将沿着上下方向z的方向观察(俯视)下的大小至少不同的两种容器作为对象容器30处置。而且,在图5所示的例子中,根据对象容器30的种类,被收容于对象容器30的对象基板2的俯视下的大小也不同。在这样的情况下,例如控制部40优选的是构成为,对于对象动作的各自按照收容于对象容器30的对象基板2的种类与对象容器30的种类的组合而设定不同的动作速度。在对象基板2的种类有m个(m是自然数)、对象容器30的种类有n个(n是自然数)的情况下,对象基板2的种类与对象容器30的种类的组合存在m
×
n个。在此情况下,在控制部40参照的存储部,关于对象动作的各自,将由作业者或自动设定的动作速度与对象基板2的种类和对象容器30的种类的组合建立关联而存储。即,在控制部40参照的存储部,关于对象动作的各自,将动作速度至少与对象基板2的种类建立关联而存储,这里,与对象基板2的种类和对象容器30的种类的组合建立关联而存储。例如,可以做成控制部40管理对象容器30的种类的信息的结构,或做成控制部40从上位控制部41取得对象容器30的种类的信息的结构。
39.例如,在被作为对象容器30处置的容器的构造是随着容器变大而基板的支承间隔变大那样的构造的情况下,可能随着容器变大而变得容易发生基板的晃动、浮起。在被作为对象容器30处置的容器的构造是随着容器变大而变得容易发生基板的晃动、浮起那样的构造的情况下,例如优选的是做成控制部40以随着对象容器30变大(例如,俯视下的大小变大)而变低的方式设定关于对象动作的各自的动作速度的结构。在此情况下,在控制部40参照的存储部,关于对象动作的各自,存储有以随着对象容器30变大而变低的方式设定的动作速度。
40.在本实施方式中,在对象动作中包括升降动作m2。而且,在本实施方式中,对象容器30将对象基板2从下侧z2支承。由此,在使对象容器30下降的情况下,与使对象容器30上升的情况相比,变得容易发生伴随着升降动作m2的对象基板2的浮起。考虑这一点,例如优选的是做成控制部40关于升降动作m2将使对象容器30下降的情况下的动作速度设定为比使对象容器30上升的情况下的动作速度低的结构。在此情况下,例如在控制部40参照的存储部,作为升降动作m2的动作速度,存储有使对象容器30下降的情况下的下降用动作速度和使对象容器30上升的情况下的上升用动作速度(比下降用动作速度高的动作速度)。将这些下降用动作速度及上升用动作速度至少与对象基板2的种类建立关联而存储。
41.顺便说一下,有控制部40使容器处置装置10并行进行多个对象动作的情况。图6表示容器处置装置10并行进行多个对象动作的状况的一例,在图6所示的例子中,容器处置装置10并行进行移动动作m1和升降动作m2。这样,在控制部40使容器处置装置10并行进行多
个对象动作的情况下,例如优选的是做成控制部40使多个对象动作的全部以对多个对象动作的各自设定的动作速度中的最低的动作速度进行的结构。
42.另外,多个对象动作之间的被设定的动作速度的比较,也可以不是以绝对值的比较,而设为以上述的速度比例(即,相对于基准速度的比例)的比较。在此情况下,上述的“最低的动作速度”成为“最低的速度比例”,将对象动作的各自以对各对象动作的基准速度乘以最低的速度比例所得到的动作速度进行。由于回转动作m3的动作速度是角速度,所以不能与移动动作m1、升降动作m2及移载动作m4的动作速度原样(即,以绝对值)比较。因此,在容器处置装置10并行进行的多个对象动作中包括回转动作m3的情况下,优选的是将多个对象动作之间的被设定的动作速度的比较设为以速度比例的比较。
43.在本实施方式中,在对象动作中包括移动动作m1。而且,如在图7及图8中表示一例那样,在对象容器30具备将对象基板2的收容空间31的内部与外部连通的开口部32的情况下,具体而言,在对象容器30具备形成有开口部32的侧面和没有形成开口部32的侧面(包括开口部被关闭的侧面)的两者的情况下,在对象容器30以对象姿势被容器处置装置10(具体而言,支承体15)支承的情况下(参照图8),与对象容器30以不同于对象姿势的姿势被容器处置装置10(具体而言,支承体15)支承的情况(参照图7)相比,变得容易发生伴随着移动动作m1的对象基板2的浮起。
44.这里,对象姿势如图8所示,是开口部32成为容器处置装置10的移动方向t的前侧t1的对象容器30的姿势。在图7及图8所示的例子中,对象容器30在相互平行的两个侧面的各自具备开口部32,图8所示的对象容器30的姿势和使图8所示的对象容器30绕沿着上下方向z的轴心旋转180度后的对象容器30的姿势的两者成为对象姿势。考虑上述这一点,例如优选的是做成控制部40关于移动动作m1将对象容器30以对象姿势被容器处置装置10支承的情况下的动作速度设定为比对象容器30以与对象姿势不同的姿势被容器处置装置10支承的情况下的动作速度低的结构。在此情况下,例如在控制部40参照的存储部,作为移动动作m1的动作速度,存储有对象容器30以对象姿势被容器处置装置10支承的情况下的对象姿势用动作速度和对象容器30以与对象姿势不同的姿势被容器处置装置10支承的情况下的非对象姿势用动作速度(比对象姿势用动作速度高的动作速度)。将这些对象姿势用动作速度及非对象姿势用动作速度至少与对象基板2的种类建立关联而存储。另外,在图7及图8中,将伴随着移动动作m1的空气的流动用箭头f表示。
45.〔其他实施方式〕接着,对容器处置设备的其他实施方式进行说明。
46.(1)在上述的实施方式中,以对象容器30能够将水平姿势的多片对象基板2在上下方向z上排列而收容的结构为例进行了说明。但是,本公开并不限定于这样的结构,也可以做成将对象基板2以与水平姿势不同的姿势(例如,沿着铅直面的姿势)收容于对象容器30的结构,或做成对象容器30仅能够收容1片对象基板2的结构。
47.(2)在上述的实施方式中,以将移动动作m1、升降动作m2、回转动作m3及移载动作m4的全部作为对象动作的结构为例进行了说明。但是,本公开并不限定于这样的结构,也可以做成仅将移动动作m1、升降动作m2、回转动作m3及移载动作m4的四个动作中的两个或三个动作作为对象动作的结构。在容器处置装置10构成为进行移动动作m1、升降动作m2、回转动作m3及移载动作m4的全部的情况下,也可以仅将这四个动作中的两个或三个动作作为对
象动作。
48.(3)在上述的实施方式中,以容器处置装置10是堆垛起重机的结构为例进行了说明。但是,本公开并不限定于这样的结构,例如,也可以将容器处置装置10做成沿着被沿着地面假想地设定的移动路径p自律行驶而输送对象容器30的输送装置、或做成沿着被沿着顶棚形成的移动路径p行驶而输送对象容器30的输送装置(顶棚输送装置)、或做成在与收纳搁架50的各层对应而沿着水平方向形成的移动路径p行驶的输送装置。
49.(4)另外,在上述的各实施方式中公开的结构只要不发生矛盾,也可以与在其他实施方式中公开的结构组合而应用(包括作为其他实施方式说明的实施方式彼此的组合)。关于其他结构,在本说明书中公开的实施方式也在全部的方面都只不过是单单的例示。因而,在不脱离本公开的主旨的范围内能够适当进行各种改变。
50.〔上述实施方式的概要〕以下,对在上述中说明的容器处置设备的概要进行说明。
51.容器处置设备具备:容器处置装置,处置对象容器;控制部,控制前述容器处置装置的动作;在前述对象容器,收容对象基板,所述对象基板是至少厚度不同的多个种类的基板中的某个种类的基板;前述容器处置装置构成为,进行对象动作,所述对象动作是在支承着前述对象容器的状态下沿着移动路径移动的移动动作、使前述对象容器升降的升降动作、使前述对象容器绕沿着上下方向的轴心旋转的回转动作和使前述对象容器朝向前述对象容器的移载对象部位移动的移载动作中的至少两个动作;前述控制部构成为,能够对于前述对象动作的各自,按照收容于前述对象容器的前述对象基板的种类而设定不同的动作速度。
52.在本结构中,由于被收容于容器处置装置处置的对象容器的货物是基板,所以根据容器处置装置的动作速度,有因对象容器的振动、风压而基板晃动或浮起的可能。而且,在本结构中,由于被收容于对象容器的基板(对象基板)是至少厚度不同的多个种类的基板中的某个种类的基板,所以基板的晃动、浮起的发生容易度可能根据基板的种类而不同。根据本结构,能够对于作为移动动作、升降动作、回转动作及移载动作中的至少两个动作的对象动作的各自,按照收容于对象容器的对象基板的种类而设定不同的动作速度。由此,能够根据对象基板的每个种类的厚度、形状等适当地设定关于对象动作的各自的适当的动作速度,以使得不易发生对象基板的晃动、浮起。通过这样不是仅对于容器处置装置的一个动作、而是对于两个以上的动作的各自进行对象基板的每个种类的动作速度的设定,能够有效地抑制对象基板的晃动、浮起的发生,适当地保护对象基板。如以上这样,根据本结构,能够适当地保护作为收容于对象容器的货物的基板。
53.这里,优选的是,前述控制部以随着前述对象基板的厚度变小而变低的方式设定关于前述对象动作的各自的动作速度。
54.根据本结构,能够考虑一般随着基板的厚度变小而变得容易发生基板的晃动、浮起,而适当地设定关于对象动作的各自的动作速度。
55.此外,优选的是,前述容器处置装置构成为,能够将大小不同的多个种类的容器作为前述对象容器处置;前述控制部构成为,能够对于前述对象动作的各自,按照收容于前述对象容器的前述对象基板的种类和前述对象容器的种类的组合而设定不同的动作速度。
56.基板的支承形态(例如支承间隔)等基板的容器内的收容形态给基板的晃动、浮起
的发生容易度带来影响,但基板的容器内的收容形态一般根据容器的大小而不同。在本结构中,由于容器处置装置构成为,能够将大小不同的多个种类的容器作为对象容器处置,所以基板的晃动、浮起的发生容易度可能根据对象容器的大小而不同。在本结构中,由于考虑这一点,能够对于对象动作的各自,按照收容于对象容器的对象基板的种类和对象容器的种类的组合而设定不同的动作速度,所以能够更进一步抑制基板的晃动、浮起的发生。
57.在如上述那样,前述控制部能够对于前述对象动作的各自按照收容于前述对象容器的前述对象基板的种类和前述对象容器的种类的组合而设定不同的动作速度的结构中,优选的是,前述控制部以随着前述对象容器变大而变低的方式设定关于前述对象动作的各自的动作速度。
58.根据容器的构造,有随着容器变大而变得容易发生基板的晃动、浮起的情况。根据本结构,在这样的情况下能够适当地设定关于对象动作的各自的动作速度。
59.在上述的各结构的容器处置设备中,优选的是,前述控制部在使前述容器处置装置并行进行多个前述对象动作的情况下,使多个前述对象动作的全部以对多个前述对象动作的各自设定的动作速度中的最低的动作速度进行。
60.将例如并行进行升降动作和回转动作的情况等容器处置装置并行进行多个对象动作的情况下的基板的晃动、浮起的发生容易度设想为与单独进行各对象动作的情况下的进行最容易发生基板的晃动、浮起的动作的情况相同时,不易发生这样的问题。根据本结构,由于在容器处置装置并行进行多个对象动作的情况下,将多个对象动作的全部以对多个对象动作的各自设定的动作速度中的最低的动作速度进行,所以能够有效地抑制基板的晃动、浮起。
61.此外,优选的是,在前述对象动作中包括前述移动动作;前述对象容器具备将前述对象基板的收容空间的内部与外部连通的开口部;将前述开口部成为前述容器处置装置的移动方向的前侧的前述对象容器的姿势作为对象姿势;前述控制部关于前述移动动作,将前述对象容器以前述对象姿势被前述容器处置装置支承的情况下的动作速度设定为比前述对象容器以与前述对象姿势不同的姿势被前述容器处置装置支承的情况下的动作速度低。
62.根据本结构,能够考虑在对象容器以对象姿势被容器处置装置支承的情况下,与对象容器以与对象姿势不同的姿势被容器处置装置支承的情况相比变得容易发生伴随着移动动作的基板的浮起,而适当地设定移动动作的动作速度。
63.此外,优选的是,在前述对象动作中包括前述升降动作;前述控制部关于前述升降动作,将使前述对象容器下降的情况下的动作速度设定为比使前述对象容器上升的情况下的动作速度低。
64.一般,对象基板以被对象容器具备的支承部从下侧支承的状态被收容于对象容器。在这样的结构中,在使对象容器下降的情况下,与使对象容器上升的情况相比变得容易发生伴随着升降动作的基板的浮起。根据本结构,能够考虑这一点而适当地设定升降动作的动作速度,以使得不易发生基板的浮起。
65.有关本公开的容器处置设备只要能够起到上述各效果中的至少一个就可以。
66.附图标记说明1:移载对象部位
2:对象基板10:容器处置装置30:对象容器31:收容空间32:开口部40:控制部100:容器处置设备m1:移动动作m2:升降动作m3:回转动作m4:移载动作p:移动路径t:移动方向t1:前侧z:上下方向。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。