1.本发明涉及维护系统、维护方法及计算机可读介质。
背景技术:
2.已知有利用装配于用户的腿部并辅助用户的步行的步行辅助装置来进行步行训练的步行训练装置(例如,参照日本专利第6554996号公报)。
3.伴随于步行训练,步行辅助装置会从用户的腿部反复接受由步行引起的载荷。通过该步行的载荷,构成步行辅助装置的各部件磨损,不久后需要维护。因此,期望实现能够提示不过早且不过晚的合适的维护的时机的维护系统。
技术实现要素:
4.本发明为了解决这样的问题点而完成,主要目的在于提供能够提示合适的维护的时机的维护系统、维护方法及计算机可读介质。
5.用于达成上述目的的本发明的一方案是一种维护系统,具备步行训练装置和服务器,所述步行训练装置具有:步行辅助装置,装配于训练者的腿部,辅助所述训练者的步行;及第一发送单元,发送将与利用所述步行辅助装置的步行次数或步行时间相关的信息和所述步行辅助装置的部件建立了关联的信息,所述服务器具有:决定单元,对从所述第一发送单元发送来的与步行次数或步行时间相关的信息和预先设定的与所述步行辅助装置的耐久性相关的评价值进行比较,决定对所述步行辅助装置进行维护的时机;及第二发送单元,发送包括由所述决定单元决定出的维护的时机和该维护的对象即被建立了关联的所述步行辅助装置的部件在内的维护信息。
6.在该一方案中,可以是,所述步行辅助装置算出绕着该步行辅助装置的踝关节部的力矩载荷,并算出对算出的该力矩载荷和利用所述步行辅助装置的步行次数或步行时间进行积分而得到的积分值,所述第一发送单元将所算出的所述积分值作为所述与步行次数或步行时间相关的信息而与所述步行辅助装置的部件建立关联并发送,所述决定单元对从所述第一发送单元发送来的积分值和预先设定的与所述步行辅助装置的耐久性相关的评价值进行比较,决定对所述步行辅助装置进行维护的时机。
7.在该一方案中,可以是,所述步行辅助装置具有大腿框架、经由膝关节部而连结于该大腿框架的小腿框架、经由踝关节部而连结于该小腿框架的脚底框架、对膝关节部进行旋转驱动的电动机单元及调整所述踝关节部的可动范围的调整机构,所述步行辅助装置的部件是在所述调整机构中限制所述踝关节部的可动范围的部件。
8.在该一方案中,可以是,所述服务器还具有变更与所述步行辅助装置的耐久性相关的评价值的变更单元。
9.在该一方案中,可以是,所述第一发送单元将由设置于所述步行训练装置的传感器检测到的所述训练者的骨格动作、脚掌的载荷中心及膝关节角度的信息中的至少一个与将所述与步行次数或步行时间相关的信息和所述步行辅助装置的部件建立了关联的信息
一起向所述服务器发送,该服务器还具有偏倚判定单元,该偏倚判定单元基于由所述第一发送单元发送来的所述训练者的骨格动作、脚掌的载荷中心及膝关节角度的信息中的至少一个来判定所述训练者的步行中的载荷的偏倚方向,与所述耐久性相关的评价值以与所述载荷的偏倚方向建立对应的方式设定,所述决定单元设定与由所述偏倚判定单元判定出的训练者的步行中的载荷的偏倚方向建立了对应的与所述耐久性相关的评价值,对所设定的与耐久性相关的评价值和从所述第一发送单元发送来的与步行次数或步行时间相关的信息进行比较,决定对所述步行辅助装置进行维护的时机。
10.用于达成上述目的的本发明的一方案也可以是一种维护方法,包括以下步骤:向服务器发送将与利用步行辅助装置的步行次数或步行时间相关的信息和所述步行辅助装置的部件建立了关联的信息,所述步行辅助装置装配于训练者的腿部,辅助所述训练者的步行;所述服务器对所发送来的所述与步行次数或步行时间相关的信息和预先设定的与所述步行辅助装置的耐久性相关的评价值进行比较,决定对所述步行辅助装置进行维护的时机;及所述服务器发送包括所决定出的维护的时机和该维护的对象即被建立了关联的所述步行辅助装置的部件在内的维护信息。
11.用于达成上述目的的本发明的一方案也可以是一种计算机可读介质,保存程序,该程序使计算机执行以下处理:向服务器发送将与利用步行辅助装置的步行次数或步行时间相关的信息和所述步行辅助装置的部件建立了关联的信息,所述步行辅助装置装配于训练者的腿部,辅助所述训练者的步行;所述服务器对所发送来的所述与步行次数或步行时间相关的信息和预先设定的与所述步行辅助装置的耐久性相关的评价值进行比较,决定对所述步行辅助装置进行维护的时机;及所述服务器发送包括所决定出的维护的时机和该维护的对象即被建立了关联的所述步行辅助装置的部件在内的维护信息。
12.根据本发明,能够提供能够提示合适的维护的时机的维护系统、维护方法及计算机可读介质。
13.本公开的上述和其他的目的、特征及优点将根据下文给出的详细描述和附图而被更充分地理解,附图仅以例示的方式给出,因此不应被认为限制本公开。
附图说明
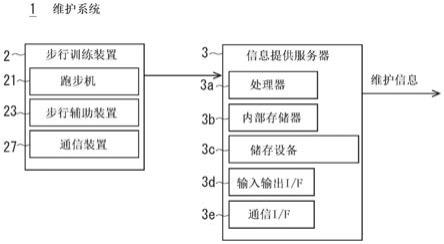
14.图1是示出本实施方式的维护系统的概略性的系统结构的框图。
15.图2是示出本实施方式的步行训练装置的概略性的结构的立体图。
16.图3是示出本实施方式的步行辅助装置的概略性的结构的侧视图。
17.图4是示出本实施方式的脚底框架的概略性的结构的立体图。
18.图5是将步行辅助装置的调整机构放大的放大图。
19.图6是示出本实施方式的维护系统的具体的系统结构的框图。
20.图7是示出本实施方式的信息提供服务器的概略性的系统结构的框图。
21.图8是示出本实施方式的维护方法的流程的流程图。
22.图9是示出本实施方式的信息提供服务器的概略性的系统结构的框图。
23.图10是示出本实施方式的信息提供服务器的概略性的系统结构的框图。
具体实施方式
24.实施方式1
25.以下,参照附图对本发明的实施方式进行说明。图1是示出本实施方式的维护系统的概略性的系统结构的框图。本实施方式的维护系统1具备供训练者进行步行训练的步行训练装置2和用于提供维护信息的信息提供服务器3。
26.图2是示出本实施方式的步行训练装置的概略性的结构的立体图。步行训练装置2设置于医院、康复设施等。步行训练装置2由跑步机21、框架主体22、步行辅助装置23等构成。跑步机21使环状的带旋转。训练者站在带上,根据该带的移动而进行步行,进行其步行训练。
27.框架主体22由连结于跑步机21上的多个框架构成。在框架主体22设置有向训练者的上方拉拽而进行辅助的拉拽装置28、显示各种信息的监视器24、检测训练者的步行状态的传感器25、训练者在训练中把持的扶手26、进行数据的收发的通信装置27等。
28.监视器24显示训练指示、训练菜单、训练信息(步行速度、生物信息等)等信息。传感器25例如是能够检测训练者的骨格的动作的3d传感器。3d传感器通过对人的体表面照射激光来取得表示体表面的凹凸的深度图像,通过从深度图像提取三维关节坐标来识别人的骨格。传感器25将检测到的训练者的骨格动作向通信装置27发送。
29.通信装置27是第一发送单元的一具体例。通信装置27与步行辅助装置23通过bluetooth(蓝牙)(注册商标)、wifi(行动热点)(注册商标)等无线或有线而通信连接。通信装置27能够与步行辅助装置23之间进行数据的收发。另外,通信装置27能够经由互联网等通信网而与信息提供服务器3进行数据的收发。需要说明的是,通信装置27也可以设置于步行辅助装置23。
30.通信装置27发送从步行辅助装置23接收到的将与利用步行辅助装置的步行次数相关的信息和步行辅助装置的部件建立了关联的信息。需要说明的是,步行训练装置2也可以是不具备跑步机21及框架主体22的结构。
31.图3是示出本实施方式的步行辅助装置的概略性的结构的侧视图。步行辅助装置23装配于训练者的腿部,辅助训练者的步行。步行辅助装置23具有大腿框架231、经由膝关节部232而连结于大腿框架231的小腿框架234、经由踝关节部235而连结于小腿框架234的脚底框架236、对膝关节部232进行旋转驱动的电动机单元237及调整踝关节部235的可动范围的调整机构238。
32.在膝关节部232设置有检测膝关节部232的角度的角度传感器239。需要说明的是,上述步行辅助装置23的结构是一例,不限于此。例如,步行辅助装置23也可以具备对踝关节部235进行旋转驱动的电动机单元。
33.图4是示出脚底框架的概略性的结构的立体图。在脚底框架236上,在脚尖侧及脚后跟侧的脚掌面分别设置有一对载荷传感器240。载荷传感器240例如是检测相对于脚底框架236的脚掌在垂直方向上施加的载荷的垂直载荷传感器。需要说明的是,设置于脚底框架236的载荷传感器240的数量及位置可以是任意的。
34.步行辅助装置23基于由各载荷传感器240检测到的载荷来算出训练者的步态动作中的脚掌的载荷中心(cop:center of pressure)的位置(以下,称作cop位置)。
35.例如,将脚底框架236的脚掌的中心位置设为二维xy坐标的原点,设为脚尖侧的第
一载荷传感器240的位置(x1,y1)、脚尖侧的第二载荷传感器240的位置(x2,y2)、脚后跟侧的第三载荷传感器240的位置(x3,y3)、脚后跟侧的第四载荷传感器240的位置(x4,y4)。将向各载荷传感器240施加的载荷量设为ni(i=1~4)。步行辅助装置23例如使用下述式子来算出cop位置(x
cop
,y
cop
)。
36.【数学式1】
[0037][0038][0039]
上述cop位置的算出方法是一例,不限定于此。例如,在脚底框架236的脚掌,也可以取代载荷传感器240而设置有检测脚掌的载荷分布的载荷分布传感器。步行辅助装置23也可以基于由载荷分布传感器检测到的脚掌的载荷分布来算出cop位置。
[0040]
步行辅助装置23基于由各载荷传感器240检测到的载荷和cop位置来算出绕着踝关节部235的背屈力矩载荷。例如,步行辅助装置23基于由各载荷传感器240检测到的载荷来算出cop位置的脚掌载荷f。步行辅助装置23算出从踝关节轴x到cop位置为止的距离l。步行辅助装置23通过对脚掌载荷f和距离l进行积分来算出绕着踝关节部235的背屈力矩载荷m。
[0041]
背屈力矩载荷m(nm)=cop位置的脚掌载荷f(n)
×
从踝关节轴x到cop位置为止的距离l(m)
[0042]
由于cop位置随着时间变化,所以背屈力矩载荷m例如也可以取每一步的最大值。
[0043]
需要说明的是,步行辅助装置23也可以基于下述式子来算出绕着踝关节部235的背屈力矩载荷m。
[0044]
背屈力矩载荷m(nm)=训练者的体重w(n)
×
从踝关节部235到重心位置为止的距离l(m)
×
sinθ
[0045]
θ是大腿部的倾斜角度(rad),基于由角度传感器239检测到的膝关节部232的角度而算出。从踝关节部235到重心位置为止的距离l也可以设定从训练者的身高统计性地换算的值。
[0046]
步行辅助装置23基于由各载荷传感器240检测到的脚掌的载荷来算出利用步行辅助装置23的步行次数n。步行辅助装置23算出对算出的绕着踝关节部235的背屈力矩载荷m和步行次数n进行积分而得到的积分值mn。步行辅助装置23将算出的积分值作为与步行次数相关的信息而与步行辅助装置23的部件建立关联并向通信装置27发送。
[0047]
需要说明的是,步行辅助装置23算出对绕着踝关节部235的背屈力矩载荷和步行次数进行积分而得到的积分值,将算出的步行次数的积分值作为与步行次数相关的信息而与步行辅助装置23的部件建立关联并向通信装置27发送,但不限定于此。
[0048]
步行辅助装置23也可以算出对绕着踝关节部235的背屈力矩载荷以步行时间进行积分而得到的积分值,将算出的积分值作为与步行时间相关的信息而与步行辅助装置23的
部件建立关联并向通信装置27发送。
[0049]
基于步行训练的绕着踝关节部235的背屈力矩载荷的积分值不仅与步行次数、也与步行时间大致成比例。因而,与步行次数同样,关于步行时间也能够求出积分值。
[0050]
上述被建立关联的步行辅助装置23的部件预先设定于步行辅助装置23,但用户能够经由输入装置等而设定变更。上述被建立关联的步行辅助装置23的部件是因步行辅助装置23的步行而消耗的消耗部件、需要校准的传感器等。
[0051]
例如,传感器是载荷传感器240等。消耗部件是接着说明的调整机构238的止动销241、止动轴242等。图5是将步行辅助装置的调整机构放大的放大图。如图5所示,在调整机构238中,由一对止动销241及止动轴242限制踝关节部235的跖屈及背屈的动作范围。
[0052]
伴随于步行训练,步行辅助装置23会从用户的腿部接受由步行引起的载荷。通过该步行的载荷,构成步行辅助装置23的各部件磨损,不久后需要维护。
[0053]
例如,在康复初期,患者的躯干不稳定,因此经常通过调整机构238的止动销241及止动轴242来限制踝关节部235的跖屈背屈的动作范围。而且,在实际的步行训练中,绕着踝关节部235的背屈力矩载荷会达到最大70nm(踢出时),止动销241的前端的载荷会达到约3500n。该背屈力矩载荷针对每一步产生,促进止动销241及止动轴242的磨损。
[0054]
这样,止动销241及止动轴242磨损,绕着踝关节部235的松动变大。因而,利用步行辅助装置23的步行变得不稳定,需要早期的维护。
[0055]
在此,在设定维护的时机的情况下,若以长的跨距设定维护的期间,则会将如上所述的不稳定的状态的步行辅助装置放置一定期间。另一方面,若以短的跨距设定维护的期间,则会频繁地将步行辅助装置为了维护而停止,康复运用的效率下降。
[0056]
因此,强烈希望实现能够提示不过早且不过晚的合适的维护的时机的维护系统。相对于此,本实施方式的维护系统1具备将包括对步行辅助装置23进行维护的时机在内的维护信息对维护公司等提供的信息提供服务器3。
[0057]
由此,维护公司等能够使用从信息提供服务器3提供的维护信息,在合适的维护的时机下进行步行辅助装置23的维护。
[0058]
图6是示出本实施方式的维护系统的具体的系统结构的框图。信息提供服务器3例如设置于厂商等。厂商等的信息提供服务器3、医院、设施等的步行训练装置2及维护公司的通信装置4例如通过互联网等通信网5而通信连接,能够相互进行数据通信。
[0059]
图7是示出本实施方式的信息提供服务器的概略性的系统结构的框图。信息提供服务器3具有决定对步行辅助装置23进行维护的时机的决定部31和进行数据的收发的收发部32。
[0060]
决定部31是决定单元的一具体例。决定部31对从步行训练装置2的通信装置27发送来的步行次数的积分值和预先设定的与步行辅助装置23的耐久性相关的评价值(以下,耐久性评价值)进行比较,决定对步行辅助装置23进行维护的时机。
[0061]
对步行辅助装置23进行维护的时机例如是进行设置于步行辅助装置23的载荷传感器240、角度传感器239等传感器的校准的时机、止动销241、止动轴242等步行辅助装置23的消耗部件的更换的时机。
[0062]
与步行辅助装置23的耐久性相关的评价值预先设定于决定部31,但用户能够任意地设定变更。与步行辅助装置23的耐久性相关的评价值例如是预先进行耐久试验等而通过
实验求出的值。
[0063]
例如,设为:进行绕着步行辅助装置23的踝关节部235的背屈力矩载荷60nm及步行次数100万的耐久试验,成为止动销241的磨损量0.3mm,需要止动销241的更换。在该情况下,与步行辅助装置23的耐久性相关的评价值成为背屈力矩载荷60nm和步行次数100万的积分值。
[0064]
需要说明的是,在上述说明中,对步行辅助装置23的消耗部件是调整机构238的止动销241及止动轴242的情况进行了说明,但不限定于此。步行辅助装置23的消耗部件例如也可以是脚底框架236的脚掌的载荷传感器240、防滑构件等。
[0065]
决定部31在判断为从步行训练装置2的通信装置27发送来的步行次数的积分值比预先设定的步行辅助装置23的耐久性评价值大的情况下,决定为在当前时间点下是进行被建立了关联的步行辅助装置23的部件的维护的时机。决定部31例如判断为在当前时间点下是更换被建立了关联的步行辅助装置23的消耗部件的时机。
[0066]
决定部31也可以对从步行训练装置2的通信装置27发送来的步行次数的积分值和预先设定的步行辅助装置23的耐久性评价值进行比较,预测相对于步行辅助装置23的将来的维护的时机。例如,决定部31算出步行次数的积分值与步行辅助装置23的耐久性评价值的差量。差量与经过时间的关系预先通过试验而求出。决定部31基于算出的差量和差量与经过时间的关系来预测相对于步行辅助装置23的将来的维护的时机。
[0067]
收发部32是第二发送单元的一具体例。收发部32将维护信息向预先登记的维护公司的通信装置4等发送。维护信息是推荐为需要步行辅助装置23的保养管理的保养管理信息。维护信息至少包括由决定部31决定出的相对于步行辅助装置23的当前时间点或将来的维护的时机和被建立了关联的步行辅助装置23的部件。
[0068]
维护公司的保养管理者等按照利用通信装置4接收到的维护的时机来进行对应的步行辅助装置23的传感器的校准、消耗部件的更换等维护。
[0069]
需要说明的是,例如,如图1所示,信息提供服务器3具有具备cpu(central processing unit:中央处理单元)、gpu(graphics processing unit:图形处理单元)等处理器3a、ram(random access memory:随机存取存储器)、rom(read only memory:只读存储器)等内部存储器3b、hdd(hard disk drive:硬盘驱动器)、sdd(solid state drive:固态驱动器)等储存设备3c、用于连接显示器等周边设备的输入输出i/f(接口)3d及与装置外部的设备进行通信的通信i/f3e的通常的计算机的硬件结构。
[0070]
信息提供服务器3例如通过处理器3a一边利用内部存储器3b一边执行保存于储存设备3c、内部存储器3b等的程序,能够实现上述的各功能性的构成要素。
[0071]
接着,说明本实施方式的维护方法的流程。图8是示出本实施方式的维护方法的流程的流程图。步行辅助装置23基于由各载荷传感器240检测到的载荷和cop位置来算出绕着踝关节部235的背屈力矩载荷(步骤s801)。
[0072]
步行辅助装置23基于由各载荷传感器240检测到的脚掌的载荷来算出利用步行辅助装置23的步行次数n(步骤s802)。
[0073]
步行辅助装置23算出对算出的绕着踝关节部的背屈力矩载荷和步行次数进行积分而得到的积分值(步骤s803)。
[0074]
步行辅助装置23将算出的步行次数的积分值作为与步行次数相关的信息而与步
行辅助装置23的部件建立关联并向通信装置27发送(步骤s804)。通信装置27将接收到的将与步行次数相关的积分值和步行辅助装置23的部件建立了关联的信息向信息提供服务器3发送。
[0075]
信息提供服务器3的决定部31判断从通信装置27发送来的与步行次数相关的积分值是否比步行辅助装置23的耐久性评价值大(步骤s805)。
[0076]
决定部31在判断为与步行次数相关的积分值比耐久性评价值大的情况下(步骤s805的是),判断为是进行被建立了关联的步行辅助装置23的部件的维护的时机(步骤s806)。另一方面,决定部31在判断为与步行次数相关的积分值比耐久性评价值小的情况下(步骤s805的否),结束本处理。
[0077]
收发部32将至少包括由决定部31决定出的维护的时机和被建立了关联的部件在内的维护信息向维护公司的通信装置4发送(步骤s807)。
[0078]
维护公司按照从信息提供服务器3的收发部32发送来的维护信息来进行对应的步行辅助装置23的部件的维护(步骤s808)。
[0079]
以上,在本实施方式中,信息提供服务器3的决定部31对从步行训练装置2的通信装置27发送来的与步行次数或步行时间相关的信息和步行辅助装置23的耐久性评价值进行比较,决定对步行辅助装置23进行维护的时机。收发部32将至少包括由决定部31决定出的维护的时机和维护的对象即被建立了关联的步行辅助装置23的部件在内的维护信息向维护公司的通信装置4等发送。
[0080]
由此,维护公司等能够使用从信息提供服务器3提供的维护信息,在合适的维护的时机下进行步行辅助装置23的维护。
[0081]
实施方式2
[0082]
在本实施方式中,信息提供服务器3的决定部31也可以根据步行辅助装置23的调整机构238的止动销241的位置而变更与步行辅助装置23的耐久性相关的评价值。
[0083]
踝关节部235的可动范围通过调整机构238的止动销241的位置而例如如4
°
、6
°
、8
°
、
…
这样被调整。另外,止动销241及止动轴242的磨损量根据踝关节部235的可动范围而变化。因此,通过根据调整机构238的止动销241的位置而变更与步行辅助装置23的耐久性相关的评价值,能够更准确地决定相对于步行辅助装置23的维护的时机。
[0084]
例如,针对调整机构238的止动销241的每个位置进行耐久试验,通过实验求出耐久性评价值,并向决定部31设定。决定部31基于在步行训练前输入的信息来确定调整机构238的止动销241的位置,设定与该确定出的止动销241的位置对应的耐久性评价值。决定部31对从通信装置27发送来的积分值和设定的耐久性评价值进行比较,决定对步行辅助装置23进行维护的时机。
[0085]
另外,止动销241及止动轴242的磨损量也根据在左右的腿部中的哪一个装配步行辅助装置23而变化。因此,也可以与调整机构238的止动销241的位置同样地,根据左右侧中的装配步行辅助装置23的腿部的一侧而变更步行辅助装置23的耐久性评价值。决定部31基于在步行训练前输入的信息来确定装配步行辅助装置23的腿部的一侧,设定与该确定出的一侧对应的耐久性评价值。
[0086]
实施方式3
[0087]
图9是示出本实施方式的信息提供服务器的概略性的系统结构的框图。本实施方
式的信息提供服务器30还具有变更步行辅助装置23的耐久性评价值的变更部33。变更部33是变更单元的一具体例。
[0088]
步行辅助装置23的耐久性评价值预先设定于决定部31,但用户能够经由变更部33而任意变更耐久性评价值。由此,能够将耐久性评价值设定为最佳的值。
[0089]
例如,也可能存在以下情况:在按照来自信息提供服务器3的维护信息而更换了步行辅助装置23的消耗品的情况下,该更换的消耗品的磨损量比在耐久试验等中设想的磨损量小,还能使用。在该情况下,用户能够经由变更部33而进行使步行辅助装置23的耐久性评价值更大的变更。相反,在更换后的消耗品的磨损量比在耐久试验等中设想的磨损量大而更换时期延迟的情况下,用户能够经由变更部33而进行使步行辅助装置23的耐久性评价值更小的变更。通过这样根据实际的步行辅助装置23的使用状态而调整步行辅助装置23的耐久性评价值,能够更准确地决定相对于步行辅助装置23的维护的时机。
[0090]
实施方式4
[0091]
图10是示出本实施方式的信息提供服务器的概略性的系统结构的框图。本实施方式的信息提供服务器30还具有判定训练者的步行中的载荷的偏倚方向的偏倚判定部34。偏倚判定部34是偏倚判定单元的一具体例。
[0092]
决定部31根据由偏倚判定部34判定出的训练者的步行中的载荷的偏倚方向来设定耐久性评价值。由此,由于根据训练者的步行中的载荷的偏倚习惯来设定最佳的耐久性评价值,所以能够更高精度地决定相对于步行辅助装置23的维护的时机。
[0093]
偏倚判定部34基于从步行训练装置2的通信装置27发送的训练者的骨格动作、cop位置及膝关节角度的信息中的至少一个来判定靠前、靠后、靠右、靠左等步行中的载荷的偏倚方向。
[0094]
例如,偏倚判定部34基于从步行训练装置2的通信装置27发送的cop位置,在cop位置靠脚尖的情况下,判定为步行中的载荷的偏倚方向是靠前。同样,偏倚判定部34基于从步行训练装置2的通信装置27发送的cop位置,在cop位置是靠右的情况下,判定为步行中的载荷的偏倚方向是靠右。
[0095]
偏倚判定部34也可以预先将骨格动作、膝关节角度等数据通过神经网络等学习器而进行机器学习,使用该学习结果来判定步行中的载荷的偏倚方向。
[0096]
关于耐久性评价值,针对载荷的每个偏倚方向进行耐久试验等,通过实验求出。耐久性评价值以与载荷的偏倚方向建立对应的方式分别设定。
[0097]
决定部31设定与由偏倚判定部34判定出的训练者的步行中的载荷的偏倚方向建立了对应的耐久性评价值。决定部31对设定的耐久性评价值和从步行训练装置2的通信装置27发送来的步行次数的积分值进行比较,决定相对于步行辅助装置23的维护的时机。
[0098]
例如,偏倚判定部34基于从步行训练装置2的通信装置27发送的cop位置而判定为训练者的步行中的载荷的偏倚方向是靠右。决定部31设定与由偏倚判定部34判定出的靠右载荷建立了对应的耐久性评价值。决定部31对靠右载荷的耐久性评价值和从步行训练装置2的通信装置27发送来的步行次数的积分值进行比较,决定相对于步行辅助装置23的维护的时机。
[0099]
虽然说明了本发明的一些实施方式,但这些实施方式作为例子而提示,并非意在限定发明的范围。这些新颖的实施方式能够以其他的各种各样的方式实施,能够在不脱离
发明的主旨的范围内进行各种省略、置换、变更。这些实施方式及其变形包含于发明的范围、主旨,并且包含于权利要求书所记载的发明及其均等的范围。
[0100]
本发明例如也能够将图8所示的处理通过使处理器执行计算机程序而实现。
[0101]
程序能够使用各种各样的类型的非暂时性的计算机可读介质(non
‑
transitory computer readable medium)来保存并向计算机供给。非暂时性的计算机可读介质包括各种各样的类型的具有实体的记录介质(tangible storage medium:有形存储介质)。非暂时性的计算机可读介质的例子包括磁记录介质(例如软盘、磁带、硬盘驱动器)、光磁记录介质(例如光磁盘)、cd
‑
rom(read only memory:只读存储器)、cd
‑
r、cd
‑
r/w、半导体存储器(例如,掩模rom、prom(programmable rom:可编程rom)、eprom(erasable prom:可擦除prom)、快闪rom、ram(random access memory:随机存取存储器))。
[0102]
程序也可以由各种各样的类型的暂时性的计算机可读介质(transitory computer readable medium)向计算机供给。暂时性的计算机可读介质的例子包括电信号、光信号及电磁波。暂时性的计算机可读介质能够经由电线及光纤等有线通信路或无线通信路而将程序向计算机供给。
[0103]
需要说明的是,构成上述的各实施方式的维护系统1的各部分不仅通过程序而实现,也能够将其一部分或全部通过asic(application specific integrated circuit:专用集成电路)、fpga(field
‑
programmable gate array:现场可编程门阵列)等专用的硬件来实现。
[0104]
根据这样描述的本公开,显而易见的是,可以以许多方式改变本公开的实施例。这样的变形不应被认为是背离本公开的精神和范围,并且对于本领域技术人员显而易见的所有这样的变形旨在包含于所附权利要求的范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。