1.本发明涉及车辆领域,具体涉及一种用于车辆的自动驾驶辅助系统、自动驾驶辅助方法以及计算机可读存储介质。
背景技术:
2.一些现有的自动驾驶车辆基于安装在外部的驱动机器或者伺服电机来控制车辆的汽油踏板、刹车或者方向盘等,进而控制车辆的行驶。但是,这种控制方式灵活性较差,且在控制车辆行驶时会有较大的延迟和偏差,尤其是在出现紧急刹车或者转弯的情况时,可能会导致难以及时刹车或者转向等。
3.因此,需要一种更加高效准确地控制车辆行驶的自动驾驶辅助系统。
技术实现要素:
4.为至少解决上述技术问题,提出了本发明如下所述的多个方案。
5.具体地,根据本发明的第一方面,提供一种用于车辆的自动驾驶辅助系统,其特征在于,所述自动驾驶辅助系统包括电子控制单元、操纵网关和中央网关,其中,
6.所述操纵网关的一端与所述电子控制单元连接,以接收所述电子控制单元发送的原始行驶控制信息;
7.所述操纵网关的另一端与所述中央网关连接,以向所述中央网关发送控制车辆行驶的控制信号;
8.所述操纵网关被配置用于还接收激活指令以及更新的行驶控制信息,在接收到激活指令时所述操纵网关启动激活模式,其中所述操纵网关在所述激活模式下将所述电子控制单元发送的原始行驶控制信息重置为所述更新的行驶控制信息,并且将所述更新的行驶控制信息作为控制信号发送给所述中央网关,以使得根据所述更新的行驶控制信息控制所述车辆的行驶。
9.在一个实施方案中,所述操纵网关还被配置为能够在非激活模式下运行,其中在所述非激活模式下,所述操纵网关直接将所述电子控制单元发送的所述原始行驶控制信息发送至所述中央网关,以使得根据所述原始行驶控制信息控制所述车辆的行驶。
10.在一个实施方案中,所述电子控制单元包括自适应巡航电子控制单元(adaptive cruise control,也可称为“acc”),并且所述操纵网关包括第一操纵网关,其中,
11.所述第一操纵网关的一端与所述自适应巡航电子控制单元连接,以接收所述自适应巡航电子控制单元发送的原始纵向行驶控制信息;
12.所述第一操纵网关的另一端与所述中央网关相连接,以向所述中央网关发送控制车辆行驶的纵向控制信号;
13.所述第一操纵网关被配置用于还接收第一激活指令以及更新的纵向行驶控制信息,在接收到所述第一激活指令时所述第一操纵网关启动激活模式,其中所述第一操纵网关在所述激活模式下将所述自适应巡航电子控制单元发送的原始纵向行驶控制信息重置
为所述更新的纵向行驶控制信息,并且将所述更新的纵向行驶控制信息作为纵向控制信号发送给所述中央网关,以使得根据所述更新的纵向行驶控制信息控制所述车辆的纵向行驶。
14.在一个实施方案中,所述电子控制单元包括电动转向电子控制单元(electric power steering,也可称为“eps”),并且所述操纵网关包括第二操纵网关,其中,
15.所述第二操纵网关的一端与所述电动转向电子控制单元连接,以接收所述电动转向电子控制单元发送的原始横向行驶控制信息;
16.所述第二操纵网关的另一端与所述中央网关相连接,以向所述中央网关发送控制车辆行驶的横向控制信号;
17.所述第二操纵网关被配置用于还接收第二激活指令以及更新的横向行驶控制信息,在接收到所述第二激活指令时所述第二操纵网关启动激活模式,所述第二操纵网关在所述激活模式下将所述电动转向电子控制单元发送的原始横向行驶控制信息重置为所述更新的横向行驶控制信息,并且将所述更新的横向行驶控制信息作为横向控制信号发送给所述中央网关,以使得根据所述更新的横向行驶控制信息控制所述车辆的横向行驶。
18.根据本发明的第二方面,提供一种车辆,在所述车辆上设置有如上所述的自动驾驶辅助系统。
19.根据本发明的第三方面,提供一种用于车辆的自动驾驶辅助方法,所述车辆具有自动驾驶辅助系统,所述自动驾驶辅助系统包括电子控制单元、操纵网关和中央网关,所述自动驾驶辅助方法包括:
20.所述操纵网关接收激活指令以及更新的行驶控制信息,在接收到激活指令时所述操纵网关启动激活模式;以及
21.所述操纵网关在所述激活模式下将所述电子控制单元发送的原始行驶控制信息重置为所述更新的行驶控制信息,并且将所述更新的行驶控制信息作为控制信号发送给所述中央网关,以使得根据所述更新的行驶控制信息控制所述车辆的行驶。
22.在一个实施方案中,其中,所述操纵网关还被配置为能够在非激活模式下运行,其中在所述非激活模式下,所述操纵网关直接将所述电子控制单元发送的所述原始行驶控制信息发送至所述中央网关,以使得根据所述原始行驶控制信息控制所述车辆的行驶。
23.在一个实施方案中,所述电子控制单元包括自适应巡航电子控制单元,所述操纵网关包括第一操纵网关,所述自动驾驶辅助方法还包括:
24.所述第一操纵网关接收第一激活指令以及更新的纵向行驶控制信息,在接收到所述第一激活指令时所述第一操纵网关启动激活模式;以及
25.所述第一操纵网关在所述激活模式下将所述自适应巡航电子控制单元发送的原始纵向行驶控制信息重置为所述更新的纵向行驶控制信息,并且将所述更新的纵向行驶控制信息作为纵向控制信号发送给所述中央网关,以使得根据所述更新的纵向行驶控制信息控制所述车辆的纵向行驶。
26.在一个实施方案中,所述电子控制单元包括电动转向电子控制单元,所述操纵网关包括第二操纵网关,所述自动驾驶辅助方法还包括:
27.所述第二操纵网关接收第二激活指令以及更新的横向行驶控制信息,在接收到所述第二激活指令时所述第二操纵网关启动激活模式;以及
28.所述第二操纵网关在所述激活模式下将所述电动转向电子控制单元发送的原始横向行驶控制信息重置为所述更新的横向行驶控制信息,并且将所述更新的横向行驶控制信息作为横向控制信号发送给所述中央网关,以使得根据所述更新的横向行驶控制信息控制所述车辆的横向行驶。
29.提供根据本发明的第四方面,提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实现上述第三方面所述的自动驾驶辅助方法。
30.本发明的自动驾驶辅助系统中通过使用操纵网关来从控制台接收激活指令以及更新的行驶控制信息,并能够在接收到激活指令时使所述操纵网关启动激活模式,在激活模式下允许操纵网关将原始行驶控制信息重置(或者篡改)为所述更新的行驶控制信息并发送给中央网关。这样能够使得直接根据中央网关接收到的所述更新的行驶控制信息控制所述车辆的行驶。本发明的基于线控驱动进行自动驾驶辅助的方案使得对车辆的行驶控制更加高效迅速,且降低了现有技术中在调整车辆时产生的延迟和偏差,从而提高了控制车辆行驶的准确性和及时性。
附图说明
31.以示例的方式参考以下附图描述本发明的非限制性且非穷举性实施方案,其中:
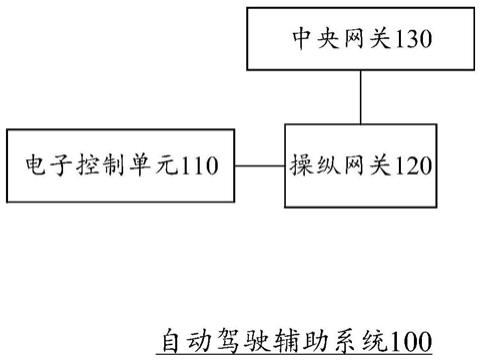
32.图1示出根据本发明的一个实施方案的用于车辆的自动驾驶辅助系统的示意图;
33.图2示出了根据本发明的另一个实施方案的用于车辆的自动驾驶辅助系统的示意图;
34.图3示出了根据本发明的又一个实施方案的用于车辆的自动驾驶辅助系统的示意图;
35.图4示出了根据本发明一实施方案的控制台的示意图;以及
36.图5示出了根据本发明一实施方案的用于车辆的自动驾驶辅助方法的流程图。
具体实施方式
37.为了使本发明的上述以及其他特征和优点更加清楚,下面结合附图进一步描述本发明。应当理解,本文给出的具体实施方案是出于向本领域技术人员解释的目的,仅是示例性的,而非限制性的。
38.图1示出根据本发明的一个实施方案的用于车辆的自动驾驶辅助系统的示意图。
39.如图1所示,该用于车辆的自动驾驶辅助系统100可以包括:电子控制单元110、操纵网关120和中央网关130,所述操纵网关120的一端与所述电子控制单元110连接,以接收所述电子控制单元发送的原始行驶控制信息。所述操纵网关120的另一端与所述中央网关130连接,以向所述中央网关发送控制车辆行驶的控制信号。所述操纵网关120被配置用于还可以接收激活指令以及更新的行驶控制信息。
40.所述操纵网关120在接收到激活指令时可以启动激活模式,并且在所述激活模式下,所述操纵网关120可以将所述电子控制单元110发送的原始行驶控制信息重置为所述更新的行驶控制信息,以使得根据所述更新的行驶控制信息控制所述车辆的行驶。
41.在一实施方案中,所述操纵网关120还可以被配置用于能够在非激活模式下运行,其中在所述非激活模式下,所述操纵网关120直接将所述电子控制单元110发送的所述原始
行驶控制信息发送至所述中央网关130,以使得根据所述原始行驶控制信息控制所述车辆行驶。在非激活模式下,所述操纵网关起到“透明”网关的作用。
42.例如,假设操纵网关没有接收到激活指令,则所述操纵网关会保持处于非激活模式下,所述操纵网关120在非激活模式下将会把原始行驶控制信息发送至所述中央网关130。这样,在非激活模式下,操纵网关不会影响车辆将电子控制单元110发送的原始行驶控制信息作为控制信号进行正常行驶。
43.图2示出了根据本发明的另一个实施方案的用于车辆的自动驾驶辅助系统的示意图。
44.如图2所示,在该实施方案中,所述电子控制单元110包括自适应巡航电子控制单元1101,所述操纵网关120包括第一操纵网关1201。所述第一操纵网关1201的一端与所述自适应巡航电子控制单元1101连接,以接收所述自适应巡航电子控制单元1101发送的原始纵向行驶控制信息。所述第一操纵网关1201的另一端与所述中央网关130相连接,以向所述中央网关130发送控制车辆行驶的纵向控制信号。
45.在本文中,所述第一操纵网关1201还可以被配置用于从控制台140接收第一激活指令以及更新的纵向行驶控制信息,在接收到所述第一激活指令时所述第一操纵网关1201启动激活模式,所述第一操纵网关1201在所述激活模式下将所述自适应巡航电子控制单元1101发送的原始纵向行驶控制信息重置为所述更新的纵向行驶控制信息,以使得根据所述更新的纵向行驶控制信息控制所述车辆的纵向行驶。
46.在一个实施例中,为示例说明,假设自适应巡航电子控制单元1101发送给第一操纵网关1201的原始纵向行驶控制信息是使车辆以恒定的第一速度(例如,50km/h)进行行驶(加速度为零)。但是,如果检测到前面设定距离范围内没有车辆或者其他的障碍物,且该道路允许在限速范围内的更高速度行驶时,控制台140可以向车辆的第一操纵网关1201发送激活指令和更新的纵向行驶控制信息以便车辆按照更新的纵向行驶控制信息进行加速。例如,该更新的纵向行驶控制信息可以是使车辆以加速度3m/s2进行加速并且加速至更高的第二速度(例如,80km/h)。操纵网关120在接收到激活指令后可以启动激活模式,并且使用更新的纵向行驶控制信息重置所述原始纵向行驶控制信息并且将所述更新的纵向行驶控制信息发送给所述中央网关130,由此可以使车辆以重置的加速度3m/s2进行加速直至达到所述第二速度,从而调整所述车辆的行驶状态。
47.类似地,在另一个实施例中,例如假设在检测到前方存在障碍物需要紧急刹车时,所述更新的纵向行驶控制信息也可以是以满足要求的减速度对车辆进行减速控制以避免车辆与障碍物发生碰撞。根据本发明的方法由于其快速的响应速度,能够满足多种应用场景下对车辆行驶状态的及时有效调整。
48.图3示出了根据本发明的又一个实施方案的用于车辆的自动驾驶辅助系统的示意图。
49.如图3所示,所述电子控制单元110包括电动转向电子控制单元1102,所述操纵网关120包括第二操纵网关1202,其中,所述第二操纵网关1202的一端与所述电动转向电子控制单元1102连接,且所述第二操纵网关1202的另一端与所述中央网关130相连接。
50.所述第二操纵网关1202还可以被配置用于从外部接收第二激活指令以及更新的横向行驶控制信息,在接收到所述第二激活指令时所述第二操纵网关1202启动激活模式,
所述第二操纵网关1202在所述激活模式下将所述电动转向电子控制单元1102发送的原始横向行驶控制信息重置为所述更新的横向行驶控制信息,以使得根据所述更新的横向行驶控制信息控制所述车辆的横向行驶。
51.具体的,举例说明,在车辆前面遇到障碍物需要变道或者车辆进入转弯路段时,控制台140会发送第二激活指令以及更新的横向行驶控制信息给第二操纵网关1202,该第二操纵网关1202在接收到第二激活指令后会进行激活模式。所述更新的横向行驶控制信息例如为方向盘每秒钟旋转10
°
直至指定方向或者调整车辆转向至设定角度等。原始横向行驶控制信息可以是以零度或者以不同幅度转动方向盘等。在该实施例中,该第二操纵网关1202在激活模式下将原始横向行驶控制信息重置为所述更新的横向行驶控制信息并且发送至中央网关130,以使得方向盘每秒钟旋转10
°
直至指定方向或者调整车辆转向至设定角度。
52.在本文中,自动驾驶辅助系统100可以包括一个或更多个操纵网关(不限于示例的一个或两个操纵网关)。相应的,不限于示例,自动驾驶辅助系统100也可以包括一个或更多个电子控制单元。当然,还可以根据实际需要包括其他类型的操纵网关和电子控制单元。为了使得说明简便,只在本文列举了第一操纵网关1201和第二操纵网关1202以及相对应的自适应巡航电子控制单元1101和电动转向电子控制单元1102进行描述。当然,如果本领域技术人员在阅读了本文后可以想到的,所述第二操纵网关和相应的电动转向电子控制单元也可以与第一操纵网关和相应的自适应巡航电子控制单元分立存在于不同车辆的自动驾驶辅助系统中。
53.在本文中,通过接收外部指令来分别对车辆的纵向和/或横向进行控制,使得车辆能够对车辆进行灵活控制,从而降低车辆自动驾驶控制过程中的延迟和误差,还可以提高自动驾驶控制的及时性和准确性。
54.图4示出了根据本发明一实施方案的控制台的示意图。
55.如图2-4中所示,自动驾驶辅助系统100还可以包括控制台140。所述激活指令以及更新的行驶控制信息可以由控制台140发送给操纵网关(例如第一操纵网关和第二操纵网关)。例如,所述控制台140可以包括便于用户输入指令或者车辆自动化控制的便携式计算机、智能电话、平板电脑、笔记本电脑、汽车控制台、车载电脑和/或其他合适的设备。如图4所示,控制台140包括处理单元1401,该处理单元1401可以与控制台140的其他部件以及与控制台140的外部部件交互。
56.控制台140还包括能够输入/输出的各种部件,例如i/o 1402、用户i/o 1403和网络i/o 1404。i/o 1402能够与操纵网关120交互并且向操纵网关120发送激活指令和更新的行驶控制信息。用户i/o 1403可以用于与用户设备交互,以接收各种用户设备的输入数据。网络i/o 1404可以用于与车载电脑交互以接收来自车载电脑、在线服务器或其他监测设备(例如安装在自车上的传感器或者安装在其他周围联网车辆或设备上的传感器)的数据。
57.图5示出了根据本发明一实施方案的用于车辆的自动驾驶辅助方法的流程图。
58.所述自动驾驶辅助方法可以应用于具有上述自动驾驶辅助系统100的车辆,所述自动驾驶辅助系统100可以包括电子控制单元110、操纵网关120和中央网关130。如图5所示,所述自动驾驶辅助方法s500包括:
59.s510:所述操纵网关接收激活指令以及更新的行驶控制信息,在接收到激活指令
时所述操纵网关启动激活模式;以及
60.s520:所述操纵网关在所述激活模式下将所述电子控制单元发送的原始行驶控制信息重置为所述更新的行驶控制信息,并且将所述更新的行驶控制信息作为控制信号发送给所述中央网关,以使得根据所述更新的行驶控制信息控制所述车辆的行驶。
61.可选地,所述操纵网关还被配置为能够在非激活模式下运行,其中在所述非激活模式下,所述操纵网关直接将所述电子控制单元发送的所述原始行驶控制信息发送至所述中央网关,以使得根据所述原始行驶控制信息控制所述车辆的行驶。
62.可选地,所述电子控制单元包括自适应巡航电子控制单元,所述操纵网关包括第一操纵网关,所述自动驾驶辅助方法还包括:
63.所述第一操纵网关接收第一激活指令以及更新的纵向行驶控制信息,在接收到所述第一激活指令时所述第一操纵网关启动激活模式;以及
64.所述第一操纵网关在所述激活模式下将所述自适应巡航电子控制单元发送的原始纵向行驶控制信息重置为所述更新的纵向行驶控制信息,并且将所述更新的纵向行驶控制信息作为纵向控制信号发送给所述中央网关,以使得根据所述更新的纵向行驶控制信息控制所述车辆的纵向行驶。
65.可选地,所述电子控制单元包括电动转向电子控制单元,所述操纵网关包括第二操纵网关,所述自动驾驶辅助方法还包括:
66.所述第二操纵网关接收第二激活指令以及更新的横向行驶控制信息,在接收到所述第二激活指令时所述第二操纵网关启动激活模式;以及
67.所述第二操纵网关在所述激活模式下将所述电动转向电子控制单元发送的原始横向行驶控制信息重置为所述更新的横向行驶控制信息,并且将所述更新的横向行驶控制信息作为横向控制信号发送给所述中央网关,以使得根据所述更新的横向行驶控制信息控制所述车辆的横向行驶。
68.关于本发明的自动驾驶辅助方法的更具体的方案,可以参照上文中对于本发明的自动驾驶辅助系统的说明,在此不再赘述。
69.另外,应理解上述系统100中的电子控制单元110、操纵网关120和中央网关130、控制台140可全部或部分通过软件、硬件及其组合来实现,例如可以硬件形式内嵌于计算机设备中的固有处理器中,也可以以软件形式存储于计算机设备中的存储器中,以便于处理器调用执行以上所述的对应操作。
70.本领域技术人员可以理解,图1中示出的自动驾驶辅助系统100的示意图仅仅是与本技术方案相关的部分结构的框图,并不构成对本技术方案所应用于其上的计算机设备的限定,具体的计算机设备可以包括比图中所示更多或更少的部件,或者组合某些部件,或者具有不同的部件布置。
71.本发明的另一方面还提供一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序在被处理器执行时实现上述任一实施方案所述的方法。
72.本领域普通技术人员可以理解实现根据本发明的上述实施方案的方法中的全部或部分步骤,可以通过计算机程序来指示相关的硬件完成,所述的计算机程序可存储于非易失性的计算机可读存储介质中,该计算机程序在执行时,可实施如上述各方法的实施方案的步骤。其中,本技术所提供的各实施方案中所使用的对存储器、存储、数据库或其它介
质的任何引用,均可包括非易失性和/或易失性存储器。非易失性存储器可包括只读存储器(rom)、可编程rom(prom)、电可编程rom(eprom)、电可擦除可编程rom(eeprom)或闪存。易失性存储器可包括随机存取存储器(ram)或者外部高速缓冲存储器。
73.以上实施方案的各个技术特征可以进行任意的组合,为使描述简洁,未对上述实施方案中的各个技术特征所有可能的组合都进行描述,然而,只要这些技术特征的组合不存在矛盾,都应当认为在本说明书记载的范围内。
74.尽管结合实施方案对本发明进行了描述,但本领域技术人员应理解,上文的描述和附图仅是示例性而非限制性的,本发明不限于所公开的实施方案。在不偏离本发明的精神的情况下,各种改型和变体是可能的。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。