1.本发明涉及具有紧急制动系统的自卸车。
背景技术:
2.在自主式的自卸车中搭载有在紧急时对车轮进行制动的紧急制动系统。紧急制动系统例如通过开放电磁阀,将蓄压在蓄能器中的工作油供给到液压制动装置。
3.这样的紧急制动系统的使用频率较少,因此,因污染物等的影响,电磁阀的滑阀有可能固着。作为解决这样的技术课题的技术,例如在专利文献1中公开了一种自卸车,在车身停止时使驻车制动器工作。由此,防止电磁阀的固着。
4.现有技术文献
5.专利文献
6.专利文献1:日本专利第5838255号公报
技术实现要素:
7.发明要解决的课题
8.但是,在使紧急制动系统工作的定时、与将砂土等装载到货箱的定时重叠时,可能产生以下的课题。首先,在使前和后的紧急制动系统双方工作的状态下进行装载时,会对车身施加过度的冲击。另一方面,在前和后的紧急制动系统双方同时被解除时,车身可能因装载时的冲击或惯性力而失控。
9.本发明是鉴于上述实际情况而完成的,其目的在于提供一种能够在适当的定时实施紧急制动系统的动作测试的自卸车。
10.用于解决课题的手段
11.为了达成上述目的,本发明的自卸车,具有:车身框架,其经由悬架将前轮及后轮支承为旋转自如;货箱,其在倒伏位置及立起位置之间能够起伏地支承于所述车身框架;支柱压力传感器,其对施加于所述悬架的压力进行检测;液压泵,其压送工作油;前轮用紧急制动系统及后轮用紧急制动系统,它们分别对所述前轮及所述后轮进行制动;以及控制装置,其控制所述前轮用紧急制动系统及所述后轮用紧急制动系统的动作,所述自卸车的特征在于,所述前轮用紧急制动系统和所述后轮用紧急制动系统分别具有:前轮用蓄能器及后轮用蓄能器,它们对从所述液压泵供给的工作油进行蓄压;前轮用制动装置及后轮用制动装置,它们利用从所述前轮用蓄能器及所述后轮用蓄能器供给的工作油而进行工作;以及前轮用电磁阀及后轮用电磁阀,它们对工作油从所述前轮用蓄能器及所述后轮用蓄能器至所述前轮用制动装置及所述后轮用制动装置的流路进行开闭,所述控制装置判断所述自卸车是否停止,判断所述货箱是否处于所述倒伏位置,根据由所述支柱压力传感器检测到的压力,判断向所述货箱的装载是否完成,在判断为所述自卸车停止、所述货箱处于所述倒伏位置、且向所述货箱的装载完成的情况下,交替地进行前测试处理和后测试处理,所述前测试处理通过对随着所述前轮用电磁阀的开闭的所述前轮用电磁阀的二次压力进行测量,
来测试所述前轮用紧急制动系统是否正常工作,所述后测试处理通过对随着所述后轮用电磁阀的开闭的所述后轮用电磁阀的二次压力进行测量,来测试所述后轮用紧急制动系统是否正常工作。
12.发明效果
13.根据本发明,能够在适当的定时实施紧急制动系统的工作测试。此外,上述以外的课题、结构以及效果通过以下的实施方式的说明变得明确。
附图说明
14.图1是本实施方式的自卸车的侧视图。
15.图2是搭载于自卸车的液压制动系统的回路图。
16.图3是搭载于自卸车的控制装置的框图。
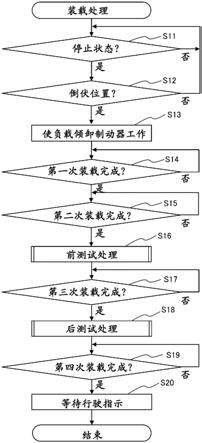
17.图4是装载处理的流程图。
18.图5是前测试处理的流程图。
19.图6是后测试处理的流程图。
20.图7是表示装载处理中的支柱压力的推移、负载倾卸制动器的状态、前螺线管的状态、后螺线管的状态的图。
具体实施方式
21.使用附图对本发明的自卸车的实施方式进行说明。图1是本实施方式的自卸车1的侧视图。此外,本说明书中的前后左右只要没有特别说明,则以搭乘自卸车1来进行操作的操作员的视点为基准。
22.如图1所示,本实施方式的自卸车1主要具有:车身框架2;一对前轮3,其经由悬架3s能够旋转地支承于车身框架2前部的左右两端;一对后轮4,其经由悬架4s能够旋转地支承于车身框架2后部的左右两端;货箱5,其能够起伏地支承于车身框架2上;以及驾驶室6,其供操作自卸车1的操作员搭乘。
23.一对前轮3是通过转向操作而使舵角变化的掌舵轮。一对后轮4是被传递行驶马达54r、54l(参照图3)的驱动力而进行旋转的驱动轮。此外,自卸车1为了独立地将驱动力分别传递至一对后轮4而具有一对行驶马达54r、54l。
24.自卸车1具有:悬架传感器(支柱压力传感器)51r、51l、52r、52l(参照图3),其对施加于分别支承一对前轮3及一对后轮4的悬架3s、4s的压力(以下,记作“支柱压力”)进行检测,将表示检测结果的检测信号输出给控制装置40(参照图3)。悬架传感器51r与右前轮3的悬架对应,悬架传感器51l与左前轮3的悬架对应,悬架传感器52r与右后轮4的悬架对应,悬架传感器52l与左后轮4的悬架对应。
25.在行驶马达54r、54l搭载有车速传感器55r、55l(参照图3)。车速传感器55r、55l检测自卸车1的行驶速度,并将表示检测结果的车速信号输出给控制装置40。更详细而言,车速传感器55r、55l优选检测行驶马达54r、54l的转速作为自卸车1的行驶速度。车速传感器55r、55l例如能够采用利用霍尔效应来检测磁场的霍尔元件。
26.货箱5通过举升缸7的伸缩而以车身框架2后部的铰链销8为中心在上下方向上起伏。举升缸7的一端与车身框架2连接,另一端与货箱5连接,从液压泵11(参照图2)接受工作
油的供给而进行伸缩。更详细而言,货箱5构成为能够在图1中实线所示的倒伏位置与图1中虚线所示的立起位置之间起伏。
27.倒伏位置是举升缸7收缩时的货箱5的位置。在货箱5处于倒伏位置时,能够利用液压挖掘机等对货箱5装载砂土等。另一方面,立起位置是举升缸7伸长时的货箱5的位置。在使货箱5从倒伏位置转动至起伏位置时,装载于货箱5中的砂土被卸载。自卸车1具有:角度传感器53(参照图3),其对货箱5相对于基准位置(例如倒伏位置)的角度进行检测,并将表示检测结果的检测信号输出给控制装置40。
28.驾驶室6配置在车身框架2前端的甲板9上的左端。驾驶室6形成供操作自卸车1的操作员搭乘的驾驶室。并且,在驾驶室6的内部配置有用于使自卸车1动作的操作装置(加速踏板、制动踏板、举升踏板、转向装置、杆、开关等)。搭乘于驾驶室6的操作员对操作装置进行操作,由此,使得自卸车1行驶(加速、制动),货箱5起伏。
29.图2是搭载于自卸车1的液压制动系统10的回路图。液压制动系统10通过由液压泵11压送的工作油对前轮3以及后轮4进行制动。液压泵11被传递发动机(省略图示)的驱动力而进行旋转,压送贮存于工作油箱37中的工作油。液压制动系统10主要具有:脚制动系统12、前轮用紧急制动系统13、后轮用紧急制动系统14、以及负载倾卸制动器(辅助制动器)15。
30.脚制动系统12按照搭乘于驾驶室6的操作员对制动踏板的踩踏操作,对前轮3及后轮4进行制动。脚制动系统12主要具有蓄能器16、17和单向阀18、19。
31.蓄能器16、17对通过单向阀18、19从液压泵11供给的工作油进行蓄压。并且,在操作员踩踏制动踏板时,蓄压于蓄能器16中的工作油通过梭阀20供给到前轮用制动装置21,蓄压于蓄能器17中的工作油通过梭阀22、23供给到后轮用制动装置24。
32.并且,前轮用制动装置21以及后轮用制动装置24通过被供给工作油而对前轮3以及后轮4进行制动。制动踏板的踩踏量越多,前轮用制动装置21及后轮用制动装置24的制动力越大。另外,在操作员停止制动踏板的踩踏时,前轮用制动装置21以及后轮用制动装置24的制动被解除。
33.前轮用紧急制动系统13按照控制装置40的控制对前轮3进行制动。前轮用紧急制动系统13主要具有:前轮用蓄能器25、单向阀26、前轮用电磁阀27以及压力传感器28。前轮用紧急制动系统13是仅在从控制装置40向前轮用电磁阀27施加控制电压的期间解除前轮3的制动的所谓“负制动器”。
34.前轮用蓄能器25对通过单向阀26从液压泵11供给的工作油进行蓄压。前轮用电磁阀27按照控制装置40的控制,对工作油从前轮用蓄能器25到前轮用制动装置21的流路进行开闭。压力传感器28对从前轮用蓄能器25输出的工作油的压力(前轮用电磁阀27的一次压力)进行检测,将表示检测结果的检测信号输出给控制装置40。
35.在未从控制装置40施加控制电压时,前轮用电磁阀27开放流路。由此,通过梭阀20从前轮用蓄能器25向前轮用制动装置21供给工作油,通过前轮用紧急制动系统13对前轮3进行制动。另一方面,在从控制装置40施加控制电压时,前轮用电磁阀27将从前轮用蓄能器25到前轮用制动装置21的流路闭塞,使前轮用制动装置21与工作油箱37连通。由此,不从前轮用蓄能器25向前轮用制动装置21供给工作油,工作油从前轮用制动装置21向工作油箱37回流。结果,前轮用紧急制动系统13对前轮3的制动被解除。
36.后轮用紧急制动系统14按照控制装置40的控制对后轮4进行制动。后轮用紧急制动系统14主要具有:后轮用蓄能器29、单向阀30、后轮用电磁阀31以及压力传感器32。后轮用紧急制动系统14是仅在从控制装置40向后轮用电磁阀31施加控制电压的期间解除后轮4的制动的所谓“负制动器”。
37.后轮用蓄能器29对通过单向阀30从液压泵11供给的工作油进行蓄压。后轮用电磁阀31按照控制装置40的控制,对工作油从后轮用蓄能器29至后轮用制动装置24的流路进行开闭。压力传感器32对从后轮用蓄能器29输出的工作油的压力(后轮用电磁阀31的一次压力)进行检测,将表示检测结果的检测信号输出给控制装置40。
38.在未从控制装置40施加控制电压时,后轮用电磁阀31开放流路。由此,通过梭阀22、23而从后轮用蓄能器29向后轮用制动装置24供给工作油,通过后轮用紧急制动系统14对后轮4进行制动。另一方面,在从控制装置40施加控制电压时,后轮用电磁阀31将从后轮用蓄能器29到后轮用制动装置24的流路闭塞,使后轮用制动装置24与工作油箱37连通。由此,不从后轮用蓄能器29向后轮用制动装置24供给工作油,工作油从后轮用制动装置24向工作油箱37回流。结果,后轮用紧急制动系统14对后轮4的制动被解除。
39.负载倾卸制动器15按照控制装置40的控制来锁定后轮4。负载倾卸制动器15例如在对货箱5装载砂土时或者卸载货箱5的砂土时,以车身不动的方式进行工作。负载倾卸制动器15主要具有蓄能器33和负载倾卸制动用电磁阀34。蓄能器33对从液压泵11供给的工作油进行蓄压。负载倾卸制动用电磁阀34按照控制装置40的控制,对工作油从蓄能器33至后轮用制动装置24的流路进行开闭。
40.在从控制装置40施加控制电压时,负载倾卸制动用电磁阀34开放流路。由此,通过梭阀23从蓄能器33向后轮用制动装置24供给工作油,通过负载倾卸制动器15对后轮4进行制动。另一方面,在未从控制装置40施加控制电压时,负载倾卸制动用电磁阀34将从蓄能器33到后轮用制动装置24的流路闭塞,使后轮用制动装置24与工作油箱37连通。由此,不从蓄能器33向后轮用制动装置24供给工作油,工作油从后轮用制动装置24向工作油箱37回流。结果,负载倾卸制动器15对后轮4的制动被解除。
41.前轮用制动装置21在脚制动系统12及前轮用紧急制动系统13中通用。另外,后轮用制动装置24在脚制动系统12、后轮用紧急制动系统14、以及负载倾卸制动器15中通用。作为一例,前轮用制动装置21是盘式制动器,后轮用制动装置24是湿式多板式。
42.另外,液压制动系统10具有:压力传感器35,其对供给到前轮用制动装置21的工作油的压力进行检测,将表示检测结果的检测信号输出给控制装置40。在前轮用紧急制动系统13工作时,压力传感器35对前轮用电磁阀27的二次压力进行检测。
43.并且,液压制动系统10具有:压力传感器36,其对供给到后轮用制动装置24的工作油的压力进行检测,将表示检测结果的检测信号输出给控制装置40。在后轮用紧急制动系统14工作时,压力传感器36对后轮用电磁阀31的二次压力进行检测。另外,在负载倾卸制动器15工作时,压力传感器36对负载倾卸制动用电磁阀34的二次压力进行检测。
44.图3是搭载于自卸车1的控制装置40的框图。控制装置40根据从悬架传感器51r、51l、52r、52l、角度传感器53及压力传感器28、32、35、36输出的检测信号及从车速传感器55r、55l输出的车速信号,来控制举升缸7、行驶马达54r、54l及各电磁阀27、31、34。另外,控制装置40构成为能够通过通信i/f44与外部装置(例如,管理服务器、液压挖掘机等)相互通
信。
45.行驶马达54r、54l分别驱动左右一对的后轮4。更详细而言,行驶马达54r、54l利用发电机(省略图示)被传递发动机的驱动力而发出的电力进行旋转驱动。由此,自卸车1行驶(加速)。
46.控制装置40构成为能够切换为手动驾驶模式和自主驾驶模式。手动驾驶模式是按照搭乘于驾驶室6的操作员的操作使自卸车1动作的模式。自主驾驶模式是按照通过通信i/f44从外部装置接收到的指示使自卸车1动作的模式。手动驾驶模式以及自主驾驶模式的切换例如通过操作员对设置于驾驶室6的操作装置的操作来进行。
47.控制装置40在手动驾驶模式时,按照操作员对操作装置的操作使自卸车1动作,并且使蓄能器16、17对工作油进行蓄压。另一方面,控制装置40在自主驾驶模式时,按照通过通信i/f44接收到的指示使自卸车1动作,并且使各蓄能器25、29、33对工作油进行蓄压。
48.作为通过通信i/f44接收的指示,例如列举出使自卸车1朝向目的地行驶的行驶指示、在通过液压挖掘机等对货箱5装载砂土时使负载倾卸制动器15工作的装载指示、将装载于货箱5中的砂土卸载的卸载指示等。
49.控制装置40在接收到行驶指示的情况下,使自卸车1朝向目的地行驶,在目的地使自卸车1停止。控制装置40在预定的定时使自卸车1制动时,使行驶马达54r、54l作为电制动器进行动作。另一方面,控制装置40在非预期的定时(例如,自卸车1从确定的路径失控了预定的距离的情况、检测到碰撞的危险的情况等)使自卸车1制动时,使前轮用紧急制动系统13及后轮用紧急制动系统14工作。
50.另外,控制装置40在接收到装载指示的情况下,参照图4执行在后面叙述的制动测试。另外,控制装置40在接收到卸载指示的情况下,使举升缸7伸长,对装载于货箱5的砂土进行卸载。
51.控制装置40具有:cpu(central processing unit)41、rom(read only memory)42以及ram(random access memory)43。控制装置40通过cpu41读出并执行储存在rom42中的程序代码来实现后述的处理。ram43用作cpu41执行程序时的工作区域。
52.但是,控制装置40的具体结构并不限定于此,也可以通过asic(application specific integrated circuit)、fpga(field
‑
programmable gate array)等硬件来实现。
53.图4是装载处理的流程图。图5是前测试处理的流程图。图6是后测试处理的流程图。图7是表示装载处理中的支柱压力的推移、负载倾卸制动器15的状态、前轮用电磁阀27(前螺线管)的状态、后轮用电磁阀31(后螺线管)的状态的图。
54.装载处理例如是利用液压挖掘机装载4次砂土的处理。并且,控制装置40在液压挖掘机进行砂土的装载的间歇,确认前轮用紧急制动系统13和后轮用紧急制动系统14是否正常动作。控制装置40例如在通过通信i/f44接收到装载指示的定时开始装载处理。
55.首先,控制装置40根据从车速传感器55r、55l输出的车速信号,来判断自卸车1是否停止(s11)。另外,控制装置40根据从角度传感器53输出的检测信号来判断货箱5是否处于倒伏位置(s12)。
56.并且,控制装置40在判断为自卸车停止且货箱5处于倒伏位置的情况下(s11:是,且s12:是),使负载倾卸制动器15工作(s13)。即,控制装置40对负载倾卸制动用电磁阀34施加控制电压。由此,对后轮4进行制动。
57.接着,控制装置40等待步骤s15以后的处理的执行,直到进行基于液压挖掘机的砂土向货箱5的第一次装载为止(s14:否)。砂土向货箱5的装载例如根据从悬挂传感器51r、51l、52r、52l输出的检测信号来进行检测。控制装置40例如如图7所示,在每一单位时间(例如,1秒)的支柱压力的变化量为δp(例如,200[kpa])以下的状态持续了δt1(例如,10秒)的情况下,判断为第一次的装载完成。
[0058]
接着,控制装置40在判断为第一次的装载完成的情况下(s14:是),等待步骤s16以后的处理的执行,直到进行基于液压挖掘机的砂土向货箱5的第二次装载为止(s15:否)。控制装置40例如如图7所示,在每一单位时间(例如,1秒)的支柱压力的变化量自超过δp起δt2(例如5秒)后,判断为第二次的装载完成。
[0059]
接着,控制装置40在判断为第二次的装载完成的情况下(s15:是),执行图5所示的前测试处理(s16)。前测试处理是通过对随着前轮用电磁阀27的开闭的前轮用电磁阀27的二次压力进行测量,来测试前轮用紧急制动系统13是否正常工作的处理。
[0060]
首先,控制装置40停止控制电压对前轮用电磁阀27的施加,开放前轮用电磁阀27(s31)。接下来,控制装置40等待以后的处理的执行,直到前轮电磁阀27的二次压力为第一阈值(例如,18mpa)以上,或者通过通信i/f44接收到行驶指令,或者从开放前轮电磁阀27起经过阈值时间为止(s32~s34)。
[0061]
控制装置40在根据从压力传感器35输出的检测信号而判断为前轮用电磁阀27的二次压力为第一阈值以上的情况下(s32:是),判断为前轮用电磁阀27适当地开放。接着,控制装置40对前轮用电磁阀27施加控制电压,将前轮用电磁阀27闭塞(s35)。接下来,控制装置40在根据从压力传感器35输出的检测信号而判断为前轮用电磁阀27的二次压力小于第二阈值(例如,1.5mpa)的情况下(s36:是),结束前测试处理。然后,控制装置40执行图4的步骤s17以后的处理。
[0062]
另外,控制装置40在前轮用电磁阀27的二次压力为第一阈值以上之前接收到行驶指示的情况下(s32:否且s33:是),对前轮用电磁阀27施加控制电压,将前轮用电磁阀27闭塞(s37)。接着,控制装置40在根据从压力传感器35输出的检测信号而判断为前轮用电磁阀27的二次压力小于第二阈值的情况下(s38:是),按照接收到的行驶指示开始自卸车1的行驶(s39)。
[0063]
此外,在步骤s33中接收到行驶指示的情况是指在执行既定的次数(例如4次)的装载之前指示了自卸车1的行驶的情况。因此,控制装置40不执行图4的步骤s17以后的处理,而结束装载处理。
[0064]
并且,控制装置40在前轮用电磁阀27的二次压力为第一阈值以上之前且接收到行驶指示之前经过了阈值时间的情况下(s32:否,且s33:否,且s34:是),报告前轮用紧急制动系统13的异常(s40)。作为报告的方法,例如可以通过通信i/f44对管理服务器通知异常,也可以将信息显示于在驾驶室6设置的显示器(省略图示)。
[0065]
此外,在步骤s34中经过了阈值时间的情况是指即使停止控制电压对前轮用电磁阀27的施加,前轮用电磁阀27也无法开放流路(即,前轮用紧急制动系统13不工作)的情况。因此,控制装置40不执行图4的步骤s17以后的处理,而结束装载处理。
[0066]
接着,返回图4,控制装置40在前测试处理正常结束的情况下,等待步骤s18以后的处理的执行,直到进行基于液压挖掘机的砂土向货箱5的第三次装载为止(s17:否)。步骤
s17的判断基准也可以与步骤s15一样。
[0067]
接着,控制装置40在判断为第三次的装载完成的情况下(s17:是),执行图6所示的后测试处理(s18)。后测试处理是通过对随着后轮用电磁阀31的开闭的后轮用电磁阀31的二次压力进行测量,来测试后轮用紧急制动系统14是否正常工作的处理。即,控制装置40在步骤s16、s18中交替地执行前测试处理以及后测试处理。
[0068]
首先,控制装置40停止控制电压对前轮用电磁阀27的施加,对前轮3进行制动(s51)。前轮3被制动能够通过由压力传感器35检测到的前轮用电磁阀27的二次压力为第一阈值以上来确认。接着,控制装置40停止控制电压对负载倾卸制动用电磁阀34的施加,解除负载倾卸制动器15对后轮4的制动(s52)。后轮4的制动被解除能够通过由压力传感器36检测到的负载倾卸制动用电磁阀34的二次压力小于第二阈值来确认。
[0069]
接着,控制装置40对后轮用紧急制动系统14执行与图5的步骤s31~s40一样的处理。在后测试处理中执行的步骤s31~s40的处理与在前测试处理中说明的处理大致共通。以下,仅对与图5的不同点进行说明。
[0070]
首先,在步骤s31中,控制装置40停止控制电压对后轮用电磁阀31的施加,开放后轮用电磁阀31。另外,控制装置40在步骤s32、s36、s38中,将基于从压力传感器36输出的检测信号的后轮用电磁阀31的二次压力、与第一阈值或第二阈值进行比较。并且,在步骤s35和s37中,控制装置40对后轮用电磁阀31施加控制电压,将后轮用电磁阀31闭塞。
[0071]
接着,控制装置40在后测试处理中的步骤s31~s40的处理正常结束的情况下(s36:是),对负载倾卸制动用电磁阀34施加控制电压,使负载倾卸制动器15工作(s53)。负载倾卸制动器15进行了动作能够通过由压力传感器36检测到的负载倾卸制动用电磁阀34的二次压力为第一阈值以上来确认。
[0072]
并且,控制装置40对前轮用电磁阀27施加控制电压,解除前轮用紧急制动系统13对前轮3的制动(s54)。前轮3的制动被解除能够通过由压力传感器35检测到的前轮用电磁阀27的二次压力小于第二阈值来确认。然后,控制装置40结束后测试处理,执行图4的步骤s19以后的处理。
[0073]
再次返回图4,控制装置40在后测试处理正常结束的情况下,判断基于液压挖掘机的砂土向货箱5的第四次装载是否完成(s19)。步骤s19的判断基准也可以与步骤s15一样。
[0074]
然后,控制装置40在判断为向货箱5的第四次装载完成的情况下(s19:是),解除负载倾卸制动器15,在接收到行驶指示之前进行待机(s20)。
[0075]
根据上述的实施方式,例如获得以下的作用效果。
[0076]
根据上述的实施方式,在利用液压挖掘机反复执行的装载的间歇,执行前测试处理(s16)及后测试处理(s18)。由此,不会在前轮3及后轮4双方制动的状态下进行向货箱5的装载,因此,能够防止对车身框架2施加过度的冲击。
[0077]
另外,根据上述实施方式,在使负载倾卸制动器15工作的状态下对前轮用电磁阀27进行开闭,而进行前轮用紧急制动系统13的工作测试。另外,在使前轮用紧急制动系统13工作的状态下对后轮用电磁阀31进行开闭,而进行后轮用紧急制动系统14的工作测试。由此,前轮3以及后轮4的制动不会被同时解除,因此,能够防止自卸车1因装载时的冲击、惯性力而失控。
[0078]
此外,基于液压挖掘机的第一次装载有时在自卸车1完全停止之前开始。另外,在
基于液压挖掘机的第四次装载结束时,自卸车1可能立即移动到下一目的地。
[0079]
对此,在上述的实施方式中,在进行4次的装载中的第二次以及第三次的装载的期间执行前测试处理,在第三次以及第四次的装载的期间执行后测试处理。由此,能够在车身框架2稳定的状态下执行前测试处理和后测试处理。
[0080]
另外,在上述的实施方式中,在前测试处理及后测试处理的执行中接收到行驶指示的情况下(s33:是),即,在使前轮用电磁阀27或后轮用电磁阀31中的至少任一方开放中,使开放中的前轮用电磁阀27及后轮用电磁阀31立即闭塞(s37),结束装载处理。由此,在执行预定次数的装载之前接收到行驶指示的情况下,能够顺畅地开始自卸车1的行驶。
[0081]
并且,在上述的实施方式中,在即使停止控制电压对前轮用电磁阀27和后轮用电磁阀31的施加,二次压力也不为第一阈值以上的情况下(s34:是),通知前轮用紧急制动系统13和后轮用紧急制动系统14的异常(s40),中止装载处理。由此,能够防止自卸车1在前轮用紧急制动系统13及后轮用紧急制动系统14未正常动作的状态下自主行驶。
[0082]
此外,步骤s14、s15、s17、s19中的装载完成的判定基准是一例,并不限定于此。另外,在步骤s14、s15、s17、s19中,可以根据由4个悬架传感器51r、51l、52r、52l的一部分检测到的支柱压力来进行装载判定,也可以根据由4个悬架传感器51r、51l、52r、52l检测到的支柱压力的平均值来进行装载判定。通过使用平均值,即使在砂土装载于从货箱5的中央偏移的位置的情况下,也能够适当地进行装载判定。
[0083]
另外,在上述的实施方式中,对前轮用紧急制动系统13和后轮用紧急制动系统14仅在自主行驶模式的情况下能够工作的例子进行了说明,但前轮用紧急制动系统13和后轮用紧急制动系统14的工作条件并不限定于所述的例子。作为其他例子,控制装置40也可以在手动行驶模式时检测到碰撞的危险性的情况下,作为脚制动系统12的辅助,使前轮用紧急制动系统13和后轮用紧急制动系统14工作。
[0084]
上述的实施方式是说明本发明用的例示,并非旨在将本发明的范围仅限定于这些实施方式。本领域技术人员能够在不脱离本发明的主旨的情况下以其他各种方式来实施本发明。
[0085]
附图标记说明:
[0086]
1 自卸车;
[0087]
2 车身框架;
[0088]
3 前轮;
[0089]
4 后轮;
[0090]
5 货箱;
[0091]
6 驾驶室;
[0092]
7 举升缸;
[0093]
8 铰链销;
[0094]
9 甲板;
[0095]
10 液压制动系统;
[0096]
11 液压泵;
[0097]
12 脚制动系统;
[0098]
13 前轮用紧急制动系统;
[0099]
14 后轮用紧急制动系统;
[0100]
15 负载倾卸制动器(辅助制动器);
[0101]
16、17、33 蓄能器;
[0102]
25 前轮用蓄能器;
[0103]
29 后轮用蓄能器;
[0104]
18、19、26、30 单向阀;
[0105]
20、22、23 梭阀;
[0106]
21 前轮用制动装置;
[0107]
24 后轮用制动装置;
[0108]
27 前轮用电磁阀;
[0109]
31 后轮用电磁阀;
[0110]
34 负载倾卸制动用电磁阀;
[0111]
28、32、35、36 压力传感器;
[0112]
37 工作油箱;
[0113]
40 控制装置;
[0114]
41 cpu;
[0115]
42 rom;
[0116]
43 ram;
[0117]
44 通信i/f;
[0118]
51r、51l、52r、52l 悬架传感器(支柱压力传感器);
[0119]
53 角度传感器;
[0120]
54r、54l 行驶马达;
[0121]
55r、55l 车速传感器。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。