1.本文所公开的方面大体上涉及机器人物体抓取和操纵。
背景技术:
2.农业技术是具有显著商业利益的部门。一些新兴农业技术的示例涉及用于作物护理和灌溉的自动化农具。收割操作的自动化提出了重大的挑战。
附图说明
3.附图不是按比例绘制的。在附图中,在各附图中示出的每个相同或几乎相同的部件由相同的数字表示。为了清楚起见,在每个附图中不是每个部件都可以被标记。在附图中:
4.图1a
‑
1d呈现了根据一个或多个实施例的用于收割目标物体的处理控制循环;
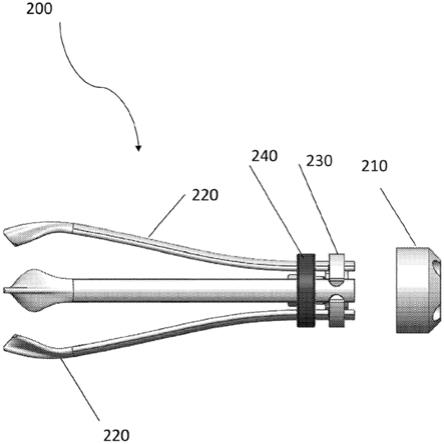
5.图2是根据一个或多个实施例的收割工具的工作头的分解图;
6.图3a
‑
3c示出了根据一个或多个实施例的各种抓取指部元件的特征;和
7.图4示出了根据一个或多个实施例的收割工具的示意图。
具体实施方式
8.根据一个或多个实施例,公开了机器人抓取和操纵工具以及相关系统和方法。
9.根据一个或多个实施例,例如,可以策略性地抓取和操纵目标物体,以便于收割目标物体。在一些实施例中,可以在适当的位置拾取目标物体,即从目标表面或目标位置拾取目标物体。在至少一些实施例中,可以抓取和扭转目标物体,以便在适当的位置使目标物体脱离。在各种实施例中,可以从环境(即,农业环境)中移除被抓取和/或脱离的目标物体。在至少一些实施例中,工具可以被构造成独立地抓取和扭转目标物体。可以使用共同的致动机构来完成各种运动,施力概况,以及经由选择可互换部件来处理不同的目标物体。有利的是,与目标物体接触的部件的数量可以最小化,以便于清洁和促进消毒操作。本文所述的工具可由与各种工业和管理安全标准相容的材料构成。
10.根据一个或多个实施例,多种目标物体可用作预期工件。目标物体可以根据其尺寸,几何形状,硬度和各种其它特性而变化。在一些实施例中,目标物体通常可以被表征为精细的或者以其他方式容易地被压碎。在至少一些实施例中,目标物体可以涉及农业产品,例如,目标物体可以是水果或蔬菜。在一些具体的非限制性实施例中,目标物体可以是番茄,胡椒或黄瓜。
11.根据一个或多个实施例,目标物体可以存在于各种环境或设置中。在一些实施例中,目标物体可以在农业环境中。在其它实施例中,目标物体可以在工业环境中。目标物体的环境或设置可以在室内或室外。在一些实施例中,目标物体通常可以在目标环境中是松散的。在其它实施例中,目标物体可以被附接或束缚到诸如目标环境中的宿主。例如,目标物体可涉及植物(例如藤)上的农业产品以用于成熟。
12.根据一个或多个实施例,收割工具可用于执行关于目标物体的一个或多个以下功能:抓取,脱离和/或移除。目标物体可以被包围和抓取。如果需要,被抓取的目标物体通常可以通过扭转操作在适当的位置脱离。例如,目标物体可以是藤上的番茄。番茄可以被抓取并通过扭转从藤的花萼中脱离。在其它实施例中,脱离可能不是必需的。可能需要相对于环境移除或重新定位被抓取的目标物体。
13.图1a
‑
1d给出了代表性但非限制性的操作置换的示意图。目标物体可以在步骤1中被抓取,在步骤2中被扭转到适当位置,并在步骤3中从周围环境中被移除。在至少一些实施例中,抓取和扭转可以独立地进行。
14.根据一个或多个实施例,收割工具通常可以包括可旋转圆柱体,以便于通过扭转来使目标物体脱离或分离。工作头可以连接在可旋转圆柱体的远端。因此,在旋转致动圆柱体时,工作头通常可以作为组件与圆柱体一起旋转。在一些实施例中,可旋转圆柱体是支撑在一个或多个轴承上的气动圆柱体。与马达(例如dc马达)相关联的齿轮可构造成使可旋转圆柱体旋转。这些特征中的一些在图4中示出。齿轮可保持具有内锥度的可旋转圆柱体。工作头可以相对于可旋转圆柱体互换,以便适应不同尺寸和/或要求的目标物体。圆柱体的旋转运动还可以有助于根据其相对于目标物体或相关环境的角度取向来精细定位工作头。
15.根据一个或多个实施例,工作头通常可提供抓取机构。在参考图2的一些实施例中,工作头200可以包括筒210和多个抓取元件220。在至少一些实施例中,多个抓取元件可以是多个指部元件。多个指部元件可以从筒径向延伸。多个指部元件可被键接以用于组装和/或被保持在工作头的保持器230内。下面讨论轴环240。多个指部元件可以被构造和布置为如本文所述包围目标物体。筒可以相对于可旋转圆柱体固定,使得工作头与可旋转圆柱体一起转动。可旋转圆柱体的旋转还可以调节目标环境中的多个指部元件的角度取向。
16.根据一个或多个实施例,多个指部元件可以被构造为适应与目标物体相关联的一个或多个要求。多个指部元件可以单独地被构造为适应与目标物体的环境(例如,农业环境)相关联的一个或多个要求。多个指部元件可以包括任何数量的指部元件,例如一个,两个,三个,四个,五个,六个或更多个指部元件。在一些实施例中,多个指部元件可以被接合以便于抓取目标物体。在其它实施例中,多个指部元件可以被成形为便于抓取目标物体。在至少一些实施例中,多个指部元件可以包括顺应性特征和/或接合表面,以便于抓取目标物体。如图3a和3b所示,在一些非限制性实施例中,凸起的脊可向抓取表面前方推进,以提供用于增强移动性的低横截面积。这种特征还可以提供能够手掌抓取目标物体的前表面。如进一步所示,曲率和开口尺寸通常可以与目标物体的尺寸相关。从圆柱体中心线到另一个梁轮廓距离的支撑距离的比率通常可以根据速度、加速度和向下夹紧的总距离来确定夹紧运动控制。多个指部元件的特征可以在于与要施加到目标物体上的期望力相关的梁的刚度值。如图3c所示,可以使用“c”形轮廓来调节梁的刚度,以减小材料厚度并增加刚度与重量的比率。抓取机构通常可以是灵巧的。
17.根据一个或多个实施例,参照图4,工作头还可以包括轴环440,轴环440通常包围多个指部元件420。筒可部分地保持多个指部元件与轴环接触。轴环440可被构造成影响多个指部元件410对目标物体的抓取。在这点上,轴环440可沿多个指部元件的长度移动。在一些实施例中,轴环440的特征可以在于与要施加到目标物体上的期望力相关的倾斜角值。在至少一些实施例中,轴环的特征可以在于与要施加到目标物体上的所希望的力相关的偏转
值。
18.根据一个或多个实施例,工作头还可以包括可延伸杆450。可延伸杆450通常可构造成便于轴环沿多个指部元件的长度运动。可延伸杆450可在第一端处容纳在可旋转圆柱体460内,并在第二端处连接到轴环。轴环440可以螺纹连接在可延伸杆450的第二端上。在操作中,可延伸杆可与轴环协作,使得可延伸杆在相对于筒的向外方向上的致动可迫使多个指部元件一起抓取目标物体。或者,可延伸杆可与轴环协作,使得可延伸杆在相对于筒向内方向上的致动可迫使多个指部元件一起抓取目标物体。
19.在一些实施例中,轴环通常可用作推动器,使得当可延伸杆被致动时,轴环收缩多个指部元件。与轴环相关的槽角可以容易地将轴向载荷转换为径向载荷。目标物体可由多个指部元件不同程度地抓取。在一些实施例中,目标物体可以基本上被抓取,而在其它实施例中,手掌抓取或部分抓取可以足以实现目标物体的脱离和/或移除。
20.根据一个或多个实施例,收割工具可构造成独立于工作头而致动可旋转圆柱体。在一些实施例中,收割工具可构造成独立于可延伸杆的致动而扭转可旋转圆柱体。收割工具可构造成从植物(例如藤)移走目标物体而不损害植物。可以在适当的位置进行脱离。随后可以从环境中移除目标物体。目标物体与宿主的这种分离可以有利地被干净地实现,而不会损坏宿主并且具有相对较低的施力。收割工具可构造成抓取目标物体,同时基本上避免环境障碍。收割工具可以被构造为在目标物体上施加低于阈值水平的力水平,例如以避免损坏目标物体。
21.根据一个或多个实施例,工作头可以包括进一步的特征,以便于抓取和/或移除目标物体。例如,可变形构件可桥接多个指部元件以便于收割操作。
22.根据一个或多个实施例,收割工具可以可拆卸地由机器人臂接收。机器人臂可以连接到机器人托架或机器人操纵器上作为机器人收割系统的一部分。在一些实施例中,两个或更多个收割工具可以可拆卸地由单个机器人臂接收。在其它实施例中,机器人收割系统的每个机器人臂可以具有专用收割工具。在其它实施例中,机器人收割系统的两个或更多个机器人臂可以各自具有两个或更多个专用收割工具。在一些实施例中,机器人收割系统可以包括与收割工具、机器人臂和/或其它部件相关联的至少一个传感器。在至少一个实施例中,机器人收割系统可以包括两个或更多个机器人托架或操纵器。
23.根据一个或多个实施例,机器人操纵器可以在相关机器人臂和/或收割工具的致动期间允许定制的运动,行进和/或力分布。在至少一些实施例中,机器人操纵器可以被校准。
24.根据一个或多个实施例,机器人收割系统可以包括可编程的处理器,以使环境和/或目标物体可视化。处理器可以是可编程的,以辨别目标物体的一个或多个属性,即其相对定位和/或其尺寸。处理器可以是可编程的,以识别和/或定位环境内的目标物体。处理器可以是可编程的,以估计目标物体的成熟度。
25.根据一个或多个实施例,机器人收割系统可以包括可编程以操作机器人臂的控制器。控制器可进一步编程以操作收割工具。控制器可以与机器人托架或操纵器相关联。控制器可接收来自处理器的输入并向机器人臂和/或收割工具提供一个或多个控制信号。
26.在一些实施例中,控制器可以是可编程的,以致动机器人臂,从而在策略上将收割工具定位在环境内。以这种方式,工作头和/或其多个指部元件可以被放置在目标物体附
近,以便于其收割。控制器可以操纵机器人臂,使得工作头的多个指部元件部分地或完全地包围目标物体。控制器可以是可编程的,以致动收割工具的可延伸杆,从而通过多个指部元件实现对目标物体的抓取。控制器可以是可编程的,以实现多个指部元件的预定闭合程度。预定的闭合程度可以与目标物体的至少一个参数(例如,目标物体的尺寸或几何形状)相关。如同包围一样,可以实现对目标物体的不同程度的抓取。一旦目标物体被抓取,控制器可以是可编程的,以致动可旋转圆柱体,以便例如通过扭转将目标物体移动到适当的位置。控制器可以是可编程的,以移除或重新定位被抓取的目标物体,或者无环境影响地或者明显地被移走。控制器还可以是可编程的,以释放和/或以其它方式将目标物体递送到期望的位置,例如用于存储或下游处理。
27.根据一个或多个实施例,控制器可以是可编程的,以便以可变速度操作机器人收割系统的各个部件。例如,收割工具工作头的机器人臂,可旋转圆柱体和/或可延伸杆可以以可变速度策略地操作。
28.根据一个或多个实施例,机器人收割系统可以被编程为根据可定制的例程来操作机器人臂和/或收割工具。例如,在一些非限制性实施例中,系统可以顺序地包围,抓取,分离和从环境中移除目标物体。
29.根据一个或多个实施例,一种收割目标物体的方法通常可以包括诸如利用多个指部元件来包围目标物体。然后可以用多个指部元件抓取目标物体。然后,可以使用扭转运动将被抓取的目标物体移动到适当的位置。目标物体的抓取可以独立于被抓取的目标物体的移动而执行。然后可以从环境中移除和/或释放被抓取的目标物体。例如,目标物体可以被释放和/或传递到下游处理。在一些非限制性实施例中,可以连续地包围、抓取、脱离和移除目标物体。在收割操作期间,可以基本上避免环境障碍,即其它目标物体,藤和/或叶子。
30.在一些实施例中,可以识别,定位和/或表征目标物体。可以基于与目标物体和/或相关环境相关联的至少一个参数来选择多个指部元件的至少一个特征。可以调整多个指部元件的角度取向。可以评估目标物体的成熟度。可以在目标物体上施加小于阈值水平的力水平。
31.已经如此描述了至少一个实施方式的几个方面,应当理解,本领域技术人员将容易想到各种改变,修改和改进。这种改变,修改和改进是本公开的一部分,并且在本公开的精神和范围内。本文所公开的方法的动作可以以不同于所示的交替顺序来执行,并且可以省略,替换或添加一个或多个动作。本文所公开的任何一个实例的一个或多个特征可以与所公开的任何其它实例的一个或多个特征组合或替代。因此,前面的描述和附图仅作为示例。
32.本文所用的措辞和术语是出于描述的目的,而不应被认为是限制性的。如本文所用,术语“多个”是指两个或更多个项目或组件。如本文所用,被描述为“基本上相似”的尺寸应被认为彼此在约25%内。术语“包括”,“包含”,“带有”,“具有”,“含有”和“涉及”,无论是在书面说明还是权利要求书中等等,都是开放式术语,即意味着“包括但不限于”。因此,这种术语的使用意味着包括其后列出的项目及其等同物,以及附加的项目。仅过渡短语“由...组成”和“基本上由...组成”分别是关于权利要求的封闭或半封闭的过渡短语。在权利要求中使用序数术语如“第一”,“第二”,“第三”等来修改权利要求元素本身并不意味着一个权利要求元素相对于另一个权利要求元素的任何优先级,优先次序或顺序,或者执行
方法动作的时间顺序,而是仅用作标签来区分具有特定名称的一个权利要求元素与具有相同名称的另一个元素(但用于序数术语的使用)来区分权利要求元素。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。