1.本发明涉及搭载于例如汽车等车辆的悬架控制装置。
背景技术:
2.已知有检测或推定车辆状态并根据其结果对悬架进行控制的悬架控制装置(参照专利文献1)。另外,已知有利用照相机等外界识别传感器取得车辆前方的路面状况,并根据所取得的路面状况来控制(预览控制)悬架的悬架控制装置(参照专利文献2)。
3.现有技术文献
4.专利文献
5.专利文献1:日本特开2014
‑
069759号公报
6.专利文献2:日本特开平11
‑
42918号公报
技术实现要素:
7.发明要解决的课题
8.然而,在根据车辆状态对悬架进行控制的情况下,为了取得车辆状态,需要各种传感器。因此,例如若加速度传感器、车高传感器、外界识别传感器等那样的传感器的数量增加,则系统复杂化,制造成本高。
9.另外,在进行预览控制的情况下,只能检测车辆前方的有限的范围,检测范围窄。因此,能够控制的条件限于例如低车速时或能够进行图像识别的天气好的白天等。
10.进而,在现有技术中,控制逻辑的参数成为在一定的条件下最优化的参数。因此,不一定能在所有路面上得到最佳的指令值。
11.本发明的目的在于提供一种悬架控制装置,能够不具备外界识别传感器地进行预览控制,能够针对所有路面得到最佳的指令值。
12.用于解决课题的方案
13.本发明的一实施方式的悬架控制装置的特征在于,具备:力产生机构,所述力产生机构设置在车辆的车身侧与车轮侧之间且能够调整产生的力;接收部,所述接收部从设置在所述车辆的外部的外部数据库接收外部信息且设置在所述车辆的内部;以及控制装置,所述控制装置设置在所述车辆的内部,对所述力产生机构的产生力进行调整,所述控制装置具有:运动检测部,所述运动检测部设置在所述车辆的内部,检测该车辆的运动;内部指令计算部,所述内部指令计算部基于从该运动检测部输出的内部信息,计算对所述力产生机构的第一指令值;以及外部指令计算部,所述外部指令计算部基于从所述接收部接收到的所述外部信息,计算对所述力产生机构的第二指令值,所述控制装置根据所述第一指令值和所述第二指令值,决定对所述力产生机构的指令值。
14.根据本发明的一实施方式的悬架控制装置,能够不具备外界识别传感器地进行预览控制,能够针对所有路面得到最佳的指令值。
附图说明
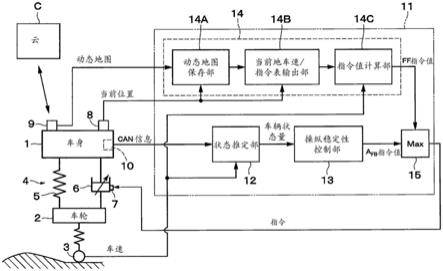
15.图1是表示本发明的第一实施方式的悬架控制装置的整体结构图。
16.图2是表示路面上下位移、路面曲率以及动态地图的指令值的一例的说明图。
17.图3是表示模拟中使用的路面形状的一例的说明图。
18.图4是表示向衰减力可变致动器供给的电流值、簧上加速度以及簧上位移的时间变化的特性线图。
19.图5是表示本发明的第二实施方式的悬架控制装置的整体结构图。
20.图6是表示本发明的第三实施方式的悬架控制装置的整体结构图。
21.图7是表示本发明的第四实施方式的悬架控制装置的整体结构图。
具体实施方式
22.以下,以将本发明的实施方式的悬架控制装置应用于四轮汽车的情况为例,参照附图来详细说明。
23.图1表示第一实施方式的悬架控制装置。在图1中,在构成车辆的车体的车身1的下侧设置有例如左右的前轮和左右的后轮(以下,总称为车轮2)。这些车轮2构成为包括轮胎(未图示)。该轮胎作为吸收路面的细小凹凸的弹簧起作用。
24.车速传感器3检测例如车轮2(即,轮胎)的转速,并将其作为车速(车辆的行驶速度)信息输出到后述的控制器11。控制器11基于来自车速传感器3的车速信息,取得车辆速度。此时,车速传感器3构成检测或推定车辆速度的车辆速度检测部。需要说明的是,控制器11不限于根据来自车速传感器3的车速信息取得车辆速度,例如也可以从can10(controller area network:控制器区域网络)等取得车辆速度。
25.悬架装置4夹设在车身1与车轮2之间而设置。悬架装置4由悬架弹簧5(以下,称为弹簧5)和与弹簧5呈并列关系地设置在车身1与车轮2之间的衰减力调整式缓冲器(以下,称为可变阻尼器6)构成。需要说明的是,图1示意性地图示出将一组悬架装置4设置在车身1与车轮2之间的情况。在四轮汽车的情况下,悬架装置4在四个车轮2与车身1之间分别独立地设置有合计4组。
26.在此,悬架装置4的可变阻尼器6是设置在车身1侧与车轮2侧之间且能够调整产生的力的力产生机构。可变阻尼器6使用衰减力调整式的液压缓冲器构成。为了将产生衰减力的特性(即,衰减力特性)从硬的特性(硬特性)连续地调整为软的特性(软特性),在可变阻尼器6附设有由衰减力调整阀等构成的衰减力可变致动器7。从控制器11向衰减力可变致动器7输入与指令值相应的指令电流(指令信号)。衰减力可变致动器7根据指令值对可变阻尼器6产生的衰减力进行调整。
27.需要说明的是,衰减力可变致动器7也可以不是必须连续地调整衰减力特性的结构,例如也可以是能够在2个阶段以上的多个阶段调整衰减力的结构。另外,可变阻尼器6可以是压力控制类型,也可以是流量控制类型。
28.gps接收机8设置于车身1,接收来自gps(global positioning system:全球定位系统)卫星的信号(以下,称为gps信号)。gps接收机8基于gps信号计算车辆的当前位置。gps接收机8将当前位置的信息输出到控制器11。需要说明的是,车辆的当前位置不限于从gps接收机8取得的情况,例如也可以通过车速传感器、陀螺仪、与地图的匹配等技术来推定。
29.通信单元9是设置在车辆的内部的接收部。通信单元9从作为设置在车辆外部的外部数据库的云c接收作为外部信息的动态地图。云c(云计算)经由网络向用户提供服务。通信单元9设置于车身1,与外部的云c进行通信。例如当在车辆侧设定目的地时,通信单元9将目的地以及当前位置的信息发送到云c。云c决定从当前位置到目的地的行驶路径,计算在路径上行驶的车速计划。通信单元9从云c接收(下载)包含算出的包含路径及车速的路径计划和与位置、车速相应的对悬架装置4(可变阻尼器6)的指令值在内的当前位置附近的动态地图。所下载的动态地图保存在控制器11的动态地图保存部14a中。此时,动态地图是将拥堵信息、通行限制等动态位置信息与静态高精度地图组合在一起的数字地图。动态地图也包含与地图上的位置和车速相应的最佳的指令值。
30.can10设置于车身1。向can10传输包含前后加速度、横向加速度、横摆率、转向角等各种车辆状态量的can信息。can10与控制器11连接。can10向控制器11输出can信息。
31.控制器11是设置在车辆的内部并调整可变阻尼器6的产生力的控制装置。控制器11具备状态推定部12、操纵稳定性控制部13、动态地图控制部14以及最大值选择部15。
32.状态推定部12是设置在车辆的内部并检测车辆的运动的运动检测部。状态推定部12基于来自can10的can信息和来自车速传感器3的车速来推定车辆的状态。需要说明的是,车速不需要从车速传感器3直接地取得,也可以经由can10取得。
33.此时,can信息例如包含车辆的前后加速度、横向加速度、横摆率、转向角等各种车辆状态量。但是,该车辆状态量包含延迟时间、噪声。因此,状态推定部12基于由can信息等取得的车辆状态量,对前后左右平移、偏摆那样的车辆的状态进行推定。状态推定部12基于推定出的车辆的状态,从取得的车辆状态量中补偿延迟时间并且除去噪声。状态推定部12计算进行了延迟时间的补偿等的车辆状态量(例如,前后加速度、横向加速度、横摆率等),并将由算出的车辆状态量构成的内部信息输出到操纵稳定性控制部13。
34.操纵稳定性控制部13是基于从状态推定部12(运动检测部)输出的车辆状态量(内部信息)计算对可变阻尼器6(力产生机构)的第一指令值的内部指令计算部。操纵稳定性控制部13例如随着横向加速度变大,计算可变阻尼器6的衰减力特性成为硬特性那样的操纵稳定性反馈指令值(以下,称为afb指令值)。此时,afb指令值是基于从状态推定部12输出的车辆状态量算出的第一指令值。
35.动态地图控制部14是基于从通信单元9接收到的动态地图(外部信息)计算对可变阻尼器6的第二指令值的外部指令计算部。动态地图控制部14根据车辆的当前位置和车速,利用动态地图,计算可变阻尼器6的衰减力特性成为硬特性或软特性的前馈指令值(以下,称为ff指令值)。此时,ff指令值是基于从通信单元9接收到的动态地图算出的第二指令值。
36.动态地图控制部14具备动态地图保存部14a、当前地车速/指令表输出部14b以及指令值计算部14c。动态地图保存部14a根据当前位置下载包含针对路面的位置信息和车速最优化的控制指令值的动态地图,并暂时保存路径计划上的数据。
37.当前地车速/指令表输出部14b基于当前位置从动态地图读出当前位置的车速/指令表并输出。假设在当前位置不在动态地图中的情况下,当前地车速/指令表输出部14b输出成为预先确定的一定的指令值(例如,固定为软特性、固定为硬特性或固定为软特性与硬特性的中间值)的车速/指令表。
38.指令值计算部14c根据从当前地车速/指令表输出部14b输出的车速/指令表,计算
与当前的车速相应的ff指令值。指令值计算部14c将ff指令值输出到最大值选择部15。
39.最大值选择部15对从操纵稳定性控制部13输出的afb指令值与从动态地图控制部14输出的ff指令值进行比较,选择成为硬特性侧(大的值)的一方作为最终的指令值。由此,控制器11根据afb指令值和ff指令值,决定对可变阻尼器6的指令值。最大值选择部15将与所选择的指令值相应的指令信号(指令电流)输出到衰减力可变致动器7。由此,控制器11根据指令值控制可变阻尼器6的产生衰减力。
40.本实施方式的悬架控制装置具有如上所述的结构,接着,参照图1对其动作进行说明。
41.首先,当从车辆侧进行目的地设定时,通信单元9将车辆的当前位置和目的地发送到云c。云c决定从当前位置到目的地的行驶路径,计算在路径上行驶的车速计划。包含算出的路径计划(路径、车速)和与位置、车速相应的对可变阻尼器6的指令值在内的当前地附近的动态地图从云c下载到控制器11。
42.当车辆开始行驶时,控制器11的动态地图控制部14根据当前位置和车速,基于动态地图,计算四轮的可变阻尼器6的ff指令值。控制器11通过使用ff指令值,能够根据保存在云c上的路面凹凸、转弯,对可变阻尼器6的产生衰减力进行前馈控制。由此,能够提高车辆的乘坐舒适性、操纵稳定性。
43.但是,存在因信号、停车车辆等而无法按照路径计划行驶的情况。因此,控制器11基于can信息(前后加速度、横向加速度、横摆率、转向角),计算对可变阻尼器6的afb指令值。控制器11通过使用afb指令值,对可变阻尼器6的产生衰减力进行反馈控制。由此,本实施方式的悬架控制装置能够应对在路径计划中不可能产生的车辆动作。
44.接着,图2表示动态地图中保存的路面位移、路面曲率、指令值(第二指令值)、位置、车速的关系例。在该动态地图中保存有从云c下载的指令值、位置、车速的映射。基于动态地图,决定基于当前的位置和车速的指令值。图2所示的例子设想了在行驶路径中包含波长不同的a路面和b路面的情况。
45.在车速低的情况(低车速的情况)下,无论是a路面还是b路面,路面输入频率都比簧上共振频率低,簧上不振动。因此,动态地图的指令值在使可变阻尼器6成为软特性的指令(软指令)下成为恒定。
46.在车速比低车速高且比高车速低的情况(中车速的情况)下,a路面的输入频率成为共振频率附近。因此,为了仅在a路面进行使可变阻尼器6成为硬特性的控制,动态地图的指令值在a路面的位置从软指令切换为硬指令(使可变阻尼器6成为硬特性的指令)。
47.在车速比中车速高的情况(高车速的情况)下,b路面的输入频率成为共振频率附近。因此,为了仅在b路面进行使可变阻尼器6成为硬特性的控制,动态地图的指令值在b路面的位置从软指令切换为硬指令。
48.另外,在高车速的情况下,根据路面曲率产生预先确定的值以上的横向加速度。即,仅在车速高的情况下横向加加速度变大。因此,动态地图的指令值在横向加加速度根据路面曲率而变大的位置从软指令切换为硬指令。
49.接着,为了确认本实施方式的悬架装置的效果,针对进行了没有云c的以往那样的反馈控制的情况和进行了基于来自云c的动态地图的前馈控制的情况,对各自的指令值进行了比较。需要说明的是,前馈控制的指令值事先根据路面的位置来决定。
50.模拟条件设为假定了e级轿车的车辆规格。模拟模型使用考虑到簧上和簧下质量的1/4车辆模型。为了确认基本的簧上的减振性能,路面为图3所示的起伏路。对车辆以80km/h行驶的情况进行了模拟。
51.反馈控制规则设为天棚控制。使用云c的前馈控制是根据位置存储有天棚控制指令的控制规则。模拟结果如图4所示。如图4所示,基于与本实施方式的动态地图信息匹配的前馈控制的电流值(指令值)与基于作为比较例表示的以往的反馈控制的电流值(指令值)大致一致。除此之外,图4中的簧上加速度以及簧上位移在比较例和本实施方式中大致一致。因此,可知与本实施方式的动态地图信息匹配的前馈控制是与作为比较例表示的以往的反馈控制同等的性能。由此,可知在与没有传感器的位置信息匹配的前馈控制中,也能够实现与以往的反馈控制同等的减振性能,能够降低成本并实现同等的性能。
52.这样,根据本实施方式,悬架控制装置具备:设置在车辆的车身1侧与车轮2侧之间且能够调整产生的力的可变阻尼器6(力产生机构);从设置在车辆的外部的云c(外部数据库)接收动态地图(外部信息)且设置在车辆的内部的通信单元9(接收部);以及设置在车辆的内部,对可变阻尼器6的产生力进行调整的控制器11(控制装置)。
53.除此之外,控制器11具有:设置在车辆的内部并检测车辆的运动的状态推定部12(运动检测部);基于从状态推定部12输出的车辆状态量(内部信息)计算对可变阻尼器6的afb指令值(第一指令值)的操纵稳定性控制部13(内部指令计算部);以及基于从通信单元9接收到的动态地图计算对可变阻尼器6的ff指令值(第二指令值)的动态地图控制部14(外部指令计算部),控制器11根据afb指令值和ff指令值,决定对可变阻尼器6的指令值。
54.由此,只要具有通信单元9,则控制器11能够下载与车辆的当前位置、车速等相应的ff指令值。因此,例如即便在没有外界视觉辨认传感器的状态下,也能够对可变阻尼器6进行预览控制,能够提高乘坐舒适性、操纵稳定性等性能。
55.另外,控制器11将由操纵稳定性控制部13进行反馈控制的afb指令值和由动态地图控制部14进行前馈控制的ff指令值组合来控制可变阻尼器6。因此,除了能够根据ff指令值在通过路面前变更控制指令之外,还能够根据afb指令值进行与车辆状态相应的可变阻尼器6的控制。其结果是,能够提高车辆的减振效果。
56.控制器11使用由动态地图控制部14进行前馈控制的ff指令值,决定对可变阻尼器6的指令值。因此,控制器11能够基于此后要行驶的路面信息来决定针对可变阻尼器6的指令值,以使控制指令值最优化。因此,控制器11能够在所有路面上决定最佳的指令值。
57.另外,操纵稳定性控制部13基于设置于车辆的can信息来计算afb指令值。因此,不需要仅为了进行悬架控制而设置加速度传感器等新的传感器,能够简化系统,降低制造成本。
58.并且,动态地图是根据路面和车速确定的对可变阻尼器6的ff指令值。因此,动态地图控制部14能够基于动态地图,计算与车辆行驶的路面和此时的车速相应的ff指令值。
59.接着,图5表示第二实施方式。第二实施方式的特征在于,在反馈控制中追加了乘坐舒适性控制。需要说明的是,在第二实施方式中,对与上述第一实施方式相同的结构部件标注相同的附图标记,并省略其说明。
60.第二实施方式的控制器21与第一实施方式的控制器11大致同样地构成,是设置在车辆的内部并调整可变阻尼器6的产生力的控制装置。控制器21例如使用微型计算机而构
成。
61.如图5所示,控制器21具备状态推定部12、操纵稳定性控制部13、乘坐舒适性控制部22、动态地图控制部14、指令值修正部23以及最大值选择部24。
62.乘坐舒适性控制部22是基于从状态推定部12(运动检测部)输出的车辆状态量(内部信息)来计算对可变阻尼器6(力产生机构)的第一指令值的内部指令计算部。乘坐舒适性控制部22具备双线性最佳控制部22a(以下,称为blq22a)、衰减系数限制部22b以及衰减力映射22c。乘坐舒适性控制部22基于从状态推定部12输出的包含簧上速度的车辆状态量和从状态推定部12输出的簧上(车身1)与簧下(车轮2)之间的相对速度,输出用于降低簧上的上下振动的乘坐舒适性反馈指令值(以下,称为bfb指令值)。此时,bfb指令值是基于从状态推定部12输出的车辆状态量算出的第一指令值。
63.除了向blq22a输入从状态推定部12输出的车辆状态量之外,还向blq22a输入从状态推定部12输出的簧上(车身1)与簧下(车轮2)之间的相对速度。blq22a基于双线性最佳控制理论,根据来自状态推定部12的车辆状态量和相对速度,计算用于降低簧上的上下振动的可变阻尼器6的衰减系数(目标衰减系数)。
64.向衰减系数限制部22b输入从blq22a输出的衰减系数和从状态推定部12输出的相对速度。衰减系数限制部22b以正值和负值分别独立地限制衰减系数的最大值。衰减系数限制部22b基于车身1与车轮2之间的上下方向的相对速度,对衰减系数的最大值施加限制。
65.向衰减力映射22c输入从衰减系数限制部22b输出的衰减系数和从状态推定部12输出的相对速度。衰减力映射22c是按照相对速度可变地设定作为目标的衰减系数与指令值的关系的映射。衰减力映射22c基于从衰减系数限制部22b输出的衰减系数和从状态推定部12输出的相对速度,计算向衰减力可变致动器7输出的bfb指令值(第一指令值)。
66.向指令值修正部23输入从动态地图控制部14输出的ff指令值和从gps接收机8输出的车辆的当前位置。指令值修正部23对由云c决定的路径计划与当前位置进行比较。指令值修正部23在判断为当前位置按照路径计划的情况下,直接输出从动态地图控制部14输出的ff指令值。另一方面,指令值修正部23在判断为当前位置偏离路径计划的情况下,将从动态地图控制部14输出的ff指令值修正为零。在该情况下,与ff指令值相比,来自操纵稳定性控制部13的afb指令值或来自乘坐舒适性控制部22的bfb指令值成为更大的值(硬特性侧的值)。因此,与基于动态地图的前馈控制的指令(第二指令值)相比,优先选择基于车辆状态量的反馈控制的指令(第一指令值)。
67.最大值选择部24对从操纵稳定性控制部13输出的afb指令值、从乘坐舒适性控制部22输出的bfb指令值以及从动态地图控制部14输出并由指令值修正部23修正后的ff指令值进行比较,选择成为最硬特性侧(大的值)的指令值作为最终的指令值。由此,控制器21根据作为第一指令值的afb指令值及bfb指令值和作为第二指令值的ff指令值,决定对可变阻尼器6的指令值。最大值选择部24将与所选择的指令值相应的指令信号(指令电流)输出到衰减力可变致动器7。由此,控制器21根据指令值控制可变阻尼器6的产生衰减力。
68.这样,在第二实施方式中,也能够得到与第一实施方式大致相同的作用效果。另外,在第二实施方式中,追加了由乘坐舒适性控制部22进行的反馈控制,因此,即便在无法由动态地图控制部14进行前馈控制的情况下,也能够抑制车身1的上下方向的振动,改善乘坐舒适性。
69.进而,控制器21优先选择作为第一指令值的afb指令值以及bfb指令值,决定对可变阻尼器6的指令值。具体而言,控制器21具备对来自动态地图控制部14的ff指令值进行修正的指令值修正部23。因此,指令值修正部23对路径计划与当前位置进行比较,在判断为偏离路径计划的情况下,为了防止不可靠的控制,将ff指令值设为零。由此,在偏离路径计划的情况下,优选由操纵稳定性控制部13以及乘坐舒适性控制部22执行反馈控制。其结果是,例如在云c上的信息较旧,实际的路面状态因施工、事故等而导致路面凹凸、车速、曲率为设想外的情况下,控制器21也能够通过操纵稳定性控制部13以及乘坐舒适性控制部22对可变阻尼器6进行反馈控制。因此,例如即便在与云c的通信中断的情况下,也能够适当地控制可变阻尼器6。
70.需要说明的是,在第二实施方式中,乘坐舒适性控制部22通过基于双线性最佳控制的控制规则来计算目标衰减系数。本发明并不限于此,乘坐舒适性控制部也可以通过例如天棚控制、h∞控制等反馈控制,求出目标衰减系数、目标衰减力。
71.接着,图6表示第三实施方式。第三实施方式的特征在于,为了检测车辆的运动,上下方向的加速度传感器安装于车辆。需要说明的是,在第三实施方式中,对与上述第一实施方式相同的结构部件标注相同的附图标记,并省略其说明。
72.簧上加速度传感器31以及簧下加速度传感器32是安装于车辆的上下加速度检测部。簧上加速度传感器31以及簧下加速度传感器32包含于运动检测部。
73.簧上加速度传感器31设置在车辆的车身1侧。簧上加速度传感器31在成为弹簧上侧的车身1侧检测上下方向的振动加速度,并将其检测信号输出到后述的控制器33。
74.簧下加速度传感器32设置在车辆的车轮2侧。簧下加速度传感器32在成为簧下侧的车轮2侧检测上下方向的振动加速度,并将其检测信号输出到后述的控制器33。
75.第三实施方式的控制器33与第一实施方式的控制器11大致同样地构成,是设置在车辆的内部并调整可变阻尼器6的产生力的控制装置。控制器33例如使用微型计算机而构成。
76.如图6所示,控制器33具备积分器34、36、减法器35。积分器34对来自簧上加速度传感器31的检测信号进行积分,由此运算成为相对于车身1的上下方向的速度的簧上速度。积分器34输出簧上速度。
77.减法器35从来自簧上加速度传感器31的检测信号中减去来自簧下加速度传感器32的检测信号,对簧上加速度与簧下加速度之差进行运算。此时,该差值对应于车身1与车轮2之间的相对加速度。
78.积分器36对从减法器35输出的相对加速度进行积分,运算车身1与车轮2之间的上下方向的相对速度。积分器36输出相对速度。
79.另外,控制器33具备状态推定部12、操纵稳定性控制部13、乘坐舒适性控制部37、动态地图控制部14以及最大值选择部38。
80.乘坐舒适性控制部37与第二实施方式的乘坐舒适性控制部22同样地构成。乘坐舒适性控制部37是基于从簧上加速度传感器31以及簧下加速度传感器32输出的簧上加速度以及簧下加速度(内部信息)计算对可变阻尼器6(力产生机构)的第一指令值的内部指令计算部。具体而言,乘坐舒适性控制部37基于从积分器34输出的簧上速度和从积分器36输出的簧上(车身1)与簧下(车轮2)之间的相对速度,输出用于降低簧上的上下振动的bfb指令
值(第一指令值)。乘坐舒适性控制部37具备与第二实施方式的blq22a、衰减系数限制部22b、衰减力映射22c相同的、双线性最佳控制部37a(以下,称为blq37a)、衰减系数限制部37b、衰减力映射37c。
81.blq37a基于双线性最佳控制理论,根据从积分器34输出的簧上速度和从积分器36输出的相对速度,计算用于降低簧上的上下振动的可变阻尼器6的衰减系数(目标衰减系数)。衰减系数限制部37b基于车身1与车轮2之间的上下方向的相对速度,对衰减系数的最大值施加限制。衰减力映射37c基于从衰减系数限制部22b输出的衰减系数和从积分器36输出的相对速度,计算作为向衰减力可变致动器7输出的第一指令值的bfb指令值。
82.最大值选择部38对从操纵稳定性控制部13输出的afb指令值、从乘坐舒适性控制部37输出的bfb指令值以及从动态地图控制部14输出的ff指令值进行比较,选择成为最硬特性侧(大的值)的指令值作为最终的指令值。由此,控制器33根据作为第一指令值的afb指令值及bfb指令值和作为第二指令值的ff指令值,决定对可变阻尼器6的指令值。最大值选择部38将与所选择的指令值相应的指令信号(指令电流)输出到衰减力可变致动器7。由此,控制器33根据指令值控制可变阻尼器6的产生衰减力。
83.这样,在第三实施方式中,也能够得到与第一实施方式大致相同的作用效果。另外,第三实施方式的悬架控制装置具备安装于车辆的簧上加速度传感器31以及簧下加速度传感器32。控制器33通过对来自簧上加速度传感器31以及簧下加速度传感器32的信号进行积分运算,由此计算簧上速度和相对速度。因此,能够直接检测车辆动作,因此,能够提高例如乘坐舒适性控制那样的反馈控制的效果。
84.需要说明的是,在操纵稳定性控制部13使用相对速度来计算afb指令值的情况下,也可以代替基于来自状态推定部12的车辆状态量取得相对速度,而使用从积分器36输出的相对速度。
85.接着,图7表示第四实施方式。第四实施方式的特征在于,动态地图控制部以及乘坐舒适性控制部计算由衰减系数构成的指令值,并且控制器限制这些指令值的大小来决定对可变阻尼器的指令值。需要说明的是,在第四实施方式中,对与上述第三实施方式相同的结构部件标注相同的附图标记,并省略其说明。
86.第四实施方式的控制器41与第三实施方式的控制器33大致同样地构成,是设置在车辆的内部并调整可变阻尼器6的产生力的控制装置。控制器41例如使用微型计算机而构成。
87.如图7所示,控制器41具备积分器34、36、减法器35。另外,控制器41具备状态推定部12、动态地图控制部42、操纵稳定性控制部43、乘坐舒适性控制部44、加法器45以及衰减力映射46。
88.动态地图控制部42是基于从通信单元9接收到的动态地图(外部信息)计算对可变阻尼器6的第二指令值的外部指令计算部。动态地图控制部42与第一实施方式的动态地图控制部14同样地构成。但是,动态地图控制部42根据车辆的当前位置和车速,利用动态地图,计算用于提高操纵稳定性的目标衰减系数作为操纵稳定性前馈指令值(以下,称为aff指令值)。除此之外,动态地图控制部42根据车辆的当前位置和车速,利用动态地图,计算用于提高乘坐舒适性的目标衰减系数作为乘坐舒适性前馈指令值(以下,称为bff指令值)。aff指令值以及bff指令值是基于从通信单元9接收到的动态地图算出的第二指令值。
89.操纵稳定性控制部43是基于从状态推定部12(运动检测部)输出的车辆状态量(内部信息)计算对可变阻尼器6(力产生机构)的第一指令值的内部指令计算部。操纵稳定性控制部43例如随着横向加速度变大,计算由可变阻尼器6的衰减力特性成为硬特性那样的衰减系数(目标衰减系数)构成的afb指令值。afb指令值是基于从状态推定部12输出的车辆状态量算出的第一指令值。
90.乘坐舒适性控制部44是基于从簧上加速度传感器31以及簧下加速度传感器32输出的簧上加速度以及簧下加速度(内部信息)计算对可变阻尼器6(力产生机构)的第一指令值的内部指令计算部。具体而言,乘坐舒适性控制部44基于从积分器34输出的簧上速度和从积分器36输出的簧上(车身1)与簧下(车轮2)之间的相对速度,计算由用于降低簧上的上下振动的衰减系数(目标衰减系数)构成的bfb指令值(第一指令值)。乘坐舒适性控制部44基于算出的bfb指令值和从动态地图控制部42输入的bff指令值,输出用于提高乘坐舒适性的b指令值。乘坐舒适性控制部44具备双线性最佳控制部44a(以下,称为blq44a)、加法器44b以及衰减系数限制部44c。
91.blq37a基于双线性最佳控制理论,根据从积分器34输出的簧上速度和从积分器36输出的相对速度,计算用于降低簧上的上下振动的可变阻尼器6的衰减系数(目标衰减系数)作为bfb指令值。
92.加法器44b将由从blq37a输出的衰减系数构成的bfb指令值和由从动态地图控制部42输出的衰减系数构成的bff指令值相加。加法器44b将相加后的衰减系数输出到衰减系数限制部44c。
93.衰减系数限制部44c以正值和负值分别独立地限制衰减系数的最大值。衰减系数限制部44c基于车身1与车轮2之间的上下方向的相对速度,对衰减系数的最大值施加限制。由此,乘坐舒适性控制部44为了提高乘坐舒适性而输出由最大值被限制的衰减系数构成的b指令值。
94.加法器45将由从操纵稳定性控制部43输出的衰减系数构成的afb指令值、由从乘坐舒适性控制部44输出的衰减系数构成的b指令值、以及由从动态地图控制部42输出的衰减系数构成的aff指令值相加。加法器44b将相加后的衰减系数输出到衰减力映射46。
95.向衰减力映射46输入从加法器45输出的衰减系数和从积分器36输出的相对速度。衰减力映射46是按照相对速度可变地设定作为目标的衰减系数与指令值的关系的映射。衰减力映射46基于从加法器45输出的衰减系数和从积分器36输出的相对速度,计算向衰减力可变致动器7输出的指令值。
96.这样,在第四实施方式中,也能够得到与第一、第三实施方式大致相同的作用效果。另外,在第四实施方式中,动态地图控制部42输出由衰减系数构成的aff指令值以及bff指令值。乘坐舒适性控制部44在将由基于簧上速度和相对速度算出的衰减系数构成的bfb指令值与来自动态地图控制部42的bff指令值相加后,输出赋予了衰减系数限制的b指令值。控制器41将从操纵稳定性控制部43输出的afb指令值、从乘坐舒适性控制部44输出的b指令值、以及从动态地图控制部42输出的aff指令值相加而得到的目标衰减系数和相对速度输入到衰减力映射46,计算最终的指令值。控制器41基于该最终的指令值控制可变阻尼器6。由此,对进行乘坐舒适性控制的b指令值赋予衰减系数限制,抑制急剧的衰减力变化。与此相对,进行操纵稳定性控制的afb指令值以及aff指令值为没有限制的指令值。由此,能
够维持操纵稳定性控制指令的启动,提高操纵稳定性性能。
97.需要说明的是,在第四实施方式中,使用目标衰减系数的指令值(afb指令值、aff指令值、bfb指令值、bff指令值)。本发明并不限于此,也可以使用目标衰减力的指令值。在该情况下,衰减力映射成为表示目标衰减力、相对速度以及指令值的关系的映射。控制器也可以基于该衰减力映射来计算指令值。
98.另外,在第四实施方式中,从动态地图输出的指令值(aff指令值、bff指令值)以根据车辆规格将衰减比保持恒定的方式进行指令,从而根据车辆规格来吸收指令值的大小的差异。若设为簧上质量m、悬架弹簧常数k、悬架衰减系数c,则衰减比ζ能够用以下的数学式1的式子表示。
99.[式1]
[0100][0101]
由此,为了使衰减比ζ恒定,只要根据衰减比ζ、簧上质量m、悬架弹簧常数k,如数学式2的式子那样设定悬架的衰减系数c即可。
[0102]
[式2]
[0103][0104]
在此,在构成为对基本设定进行修正的情况下,若相对于目标的衰减系数c将基本设定设为1,将当前的车辆设为2,将修正系数设为g,则能够用以下的数学式3的式子表示。由此,通过对基本设定的目标衰减系数(目标衰减力)乘以修正系数g,能够吸收由规格差异而导致的指令值的大小差异。
[0105]
[式3]
[0106][0107]
另外,适当的控制正时根据固有振动频率而不同,因此,能够通过在云上事先从车辆侧发送车辆的规格信息,并从云输出与规格相应的指令来应对。基本上,车辆的固有振动频率越高,则指令的正时越早,固有振动频率越低,则指令的正时越晚。
[0108]
在上述各实施方式中,以利用由衰减力调整式的液压缓冲器构成的可变阻尼器6构成在车身1侧与车轮2侧之间产生能够调整的力的力产生机构的情况为例进行了说明。但是,本发明并不限于此,例如除了液压缓冲器之外,也可以由空气悬架、稳定器(动力调节悬架)、电磁悬架等构成力产生机构。
[0109]
在上述各实施方式中,作为外部数据库,以云c为例进行了说明。本发明并不限于此,例如也可以是设置在车辆的外部的服务器计算机的数据库。另外,外部信息不限于动态地图,只要是包含与位置、车速相应的对可变阻尼器的指令值的信息即可。
[0110]
在上述各实施方式中,以用于四轮汽车的悬架控制装置为例进行了说明。本发明并不限于此,例如也能够应用于2轮、3轮汽车、或作业车辆、作为运输车辆的卡车、巴士等。
[0111]
上述各实施方式是例示,当然能够进行在不同的实施方式中示出的结构的部分替换或组合。
[0112]
接着,作为上述实施方式所包含的悬架控制装置,例如可考虑以下所述的方案。
[0113]
第一方案的悬架控制装置的特征在于,具备:力产生机构,所述力产生机构设置在
车辆的车身侧与车轮侧之间且能够调整产生的力;接收部,所述接收部从设置在所述车辆的外部的外部数据库接收外部信息且设置在所述车辆的内部;以及控制装置,所述控制装置设置在所述车辆的内部,对所述力产生机构的产生力进行调整,所述控制装置具有:运动检测部,所述运动检测部设置在所述车辆的内部,检测该车辆的运动;内部指令计算部,所述内部指令计算部基于从该运动检测部输出的内部信息,计算对所述力产生机构的第一指令值;以及外部指令计算部,所述外部指令计算部基于从所述接收部接收到的所述外部信息,计算对所述力产生机构的第二指令值,所述控制装置根据所述第一指令值和所述第二指令值,决定对所述力产生机构的指令值。
[0114]
作为第二方案,在第一方案中,其特征在于,所述内部指令计算部基于设置于所述车辆的can信息来计算所述第一指令值。
[0115]
作为第三方案,在第一或第二方案中,其特征在于,所述运动检测部包括安装于所述车辆的上下加速度检测部。
[0116]
作为第四方案,在第一至第三方案中的任一方案中,其特征在于,所述控制装置优先选择所述第一指令值,并决定对所述力产生机构的指令值。
[0117]
作为第五方案,在第一至第四方案中的任一方案中,其特征在于,所述外部信息是根据路面和车速确定的对所述力产生机构的所述第二指令值。
[0118]
作为第六方案,在第一至第五方案中的任一方案中,其特征在于,所述第一指令值和所述第二指令值是衰减系数,所述控制装置对所述第一指令值的衰减系数和所述第二指令值的衰减系数的大小进行限制来决定对所述力产生机构的指令值。
[0119]
另外,本发明并不限于上述实施方式,包括各种变形例。例如,上述实施方式为了容易理解地说明本发明而详细地进行了说明,但并不限定于必须具备已说明的全部结构。另外,可以将某实施方式的结构的一部分替换为其他实施方式的结构,另外,也可以在某实施方式的结构上增加其他实施方式的结构。另外,关于各实施方式的结构的一部分,能够进行其他结构的追加、删除、替换。
[0120]
本技术要求2019年3月27日提出的日本专利申请第2019
‑
060489号的优先权。包括2019年3月27日提出的日本专利申请第2019
‑
060489号的说明书、权利要求书、附图以及摘要在内的全部公开内容通过参照而作为整体被引入本技术中。
[0121]
附图标记说明
[0122]
1车身 2车轮 3车速传感器 4悬架装置 6可变阻尼器(力产生机构) 7衰减力可变致动器 8 gps接收机 9通信单元(接收部) 10 can 11、21、33、41控制器(控制装置) 12状态推定部(运动检测部) 13、43操纵稳定性控制部(内部指令计算部) 14、42动态地图控制部(外部指令计算部) 15、24、38最大值选择部 22、37、44乘坐舒适性控制部(内部指令计算部) 31簧上加速度传感器(上下加速度检测部) 32簧下加速度传感器(上下加速度检测部)
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。