1.本实用新型属于水面救援设备技术领域,具体涉及一种水面智能救生器。
背景技术:
2.目前,我国海域开放程度越来越高,人们海上活动也与日俱增,同时伴随的海事事故和海上救援也在不断增加,很多时候在发生有人落水或有人在水中出现险情时,救生员或准备去实施救助的人员与落水者或在水中出现险情者距离比较远,游泳过去要花很长时间,往往会失去救援机会,同时,如果是遇到恶劣天气,出现大浪、急流、险滩等不利于救生员或准备去实施救助的人员下水对落水者或在水中出现险情者实施救助的情况时,救生员或准备去实施救助的人员就会束手无策,无法对落水者或在水中出现险情者实施救助。因此,亟需一种可遥控的、轻便的推进救生器。
技术实现要素:
3.为解决现有技术存在的技术问题,本实用新型提供了一种智能救生器,可实现远程操控实时救援。
4.为实现上述目的,本实用新型所采用的技术方案为:智能救生器,包括对称布置的左外壳和右外壳,左外壳的顶端与右外壳的顶端铰接,在未工作情况下,左外壳与右外壳扣合在一起并通过锁扣锁紧,减少存放空间,提升携带效率;在工作状态下,松开锁扣,将左外壳与右外壳绕铰链展开,并再次锁紧锁扣,按下防水自锁开关,整机通电处于受遥控状态。左外壳与右外壳之间通过密封板固定,中间夹装有硅胶密封圈,左右两侧之间通过硅胶密封圈与环形凹槽相配合,保证了整机对折后的防水性能。
5.救生器上装有防水自锁开关,防水自锁开关安装在中心舱中轴线上部,防水自锁开关为整机电源控制按键。
6.左外壳的尾端装有左伸缩件,左伸缩件顶端设有多个圆柱凸起,多个圆柱凸起围绕左伸缩件的中心轴呈圆周阵列排布,对应的左外壳尾端腔内设有多个直条滑槽,直条滑槽尾端设计有螺纹型斜滑槽,螺纹型斜滑槽的数量、位置与左伸缩件上的圆柱凸起吻合,可实现伸缩件展开、锁紧功能。
7.其中,左外壳的尾端通过左端盖密封。
8.右外壳的尾端装有右伸缩件,右伸缩件顶端设有多个圆柱凸起,多个圆柱凸起围绕右伸缩件的中心轴呈圆周阵列排布,对应的右外壳尾端腔内设有多个直条滑槽,直条滑槽尾端设计有螺纹型斜滑槽,螺纹型斜滑槽的数量、位置与右伸缩件上的圆柱凸起吻合,可实现伸缩件展开锁紧功能。
9.其中,右外壳的尾端通过右端盖密封。
10.左伸缩件内装有左推进器,左推进器为正浆推进器,实现正向推进。
11.右伸缩件内装有右推进器,右推进器为反桨推进器,实现反向推进。
12.左外壳顶端的电池舱内装有左锂电池,右伸缩件顶端的电池舱内装有右锂电池,
左锂电池与右锂电池均为6s
‑
6000mah锂电池,左锂电池与右锂电池为整机提供电源。
13.左外壳的顶端内装有左两路触摸感应模块,左外壳上开有左触摸孔,左触摸孔置于左两路触摸感应模块的上方,左触摸孔内的按键与左两路触摸感应模块电连接;右外壳的顶端内装有右两路触摸感应模块,右外壳上开有右触摸孔,右触摸孔置于右两路触摸感应模块的上方,右触摸孔内的按键与右两路触摸感应模块电连接。通过手指按压左触摸孔、右触摸孔来操作救生器的工作,快捷方便。
14.左外壳上装有两个fpv摄像头,摄像头后侧设有视角切换模块和5.8g图传模块安装位,用于两路fpv图像的切换控制与图像实时回传。
15.右外壳上装有两个led灯,为整机提供照明。
16.左外壳与右外壳的连接处开有中心舱,中心舱内装有金属舵机和导航外壳,导航外壳内装有中心板,中心板的一端通过轴承支撑在导航外壳内,中心板的另一端通过中心轴与金属舵机的输出轴相连,中心板上装有gps模块和导航姿态模块,gps模块和导航姿态模块能够始终保证相对水面的水平向上位置,保持整机的远程操作基础。
17.左伸缩件与左外壳的尾端之间通过o型圈密封,右伸缩件与右外壳的尾端之间通过o型圈密封。
18.救生器还包括stm32单片机核心电路芯片、gsm通讯模块、adxl345传感器模块、左推进器电路模块、右推进器电路模块、按键控制电路模块和led驱动电路模块。
19.gsm通讯模块的1号引脚与vcc_5v相连,gsm通讯模块的2号引脚接地,gsm通讯模块的3号引脚与stm32核心电路芯片的31号引脚相连,gsm通讯模块的的4号引脚与stm32核心电路芯片的30号引脚相连。gsm通讯模块实时采集位置数据,通过pa9、pa10与stm32单片机进行数据通讯,提供航行所需航向与定位数据,并为一键返航功能提供数据基础。
20.adxl345传感器模块的1号引脚与stm32核心电路芯片12号引脚相连,传感器模块的2号引脚与stm32核心电路芯片的13号引脚相连,传感器模块的6号引脚与vcc_5v相连,传感器模块的8号引脚接地。adxl345传感器模块采用倾角传感器,实时检测救生装置整体的姿态信息,通过i2c数字接口(pa2/sda和pa1/scl)传输姿态数据至stm32单片机内,由内置程序判定救生装置当前姿态及救生装置是否发生倾翻。若检测到救生装置发生倾翻,则由内置程序切换运行控制程序,对按键的对应控制功能进行对调,保证救生器在倾翻后,装置仍支持正常操作。
21.dc稳压降压开关模块由dc24
‑
12v、dc24
‑
5v、dc24
‑
3.3v和人体感应开关组成,人体感应开关模块采用红外人体感知芯片,当未检测到u型体内部有人时,gnd/g_out处于断路状态,系统整体无电源供应;当检测到u型体内部有人时,gnd/g_out改变为闭合状态,主电源导通,使用降压模块分别对24v电源进行降压处理,输出12v、5v与3.3v共三路对系统各个功能模块进行供电。
22.左推进器电路模块包括左无刷电调模块,左无刷电调模块的1号引脚与vcc_12v相连,左无刷电调模块的2号引脚接地,左无刷电调模块的3号引脚与stm32核心电路芯片的17号引脚相连,左无刷电调模块的4号引脚接地,左无刷电调与左无刷电机相连;推进器驱动电路使用无刷电调,通过按键电路对应按键触发内部程序设置的四个运行状态(启动、差速左转、差速右转、停止),stm32单片机通过引脚pa6输出pwm方波,控制无刷电机转速来实现不同运行状态。
23.右推进器电路模块包括右无刷电调模块,右无刷电调模块的1号引脚与vcc_12v相连,右无刷电调模块的2号引脚接地,右无刷电调模块的3号引脚与stm32核心电路芯片的18号引脚相连,右无刷电调的4号引脚接地,右无刷电调与右无刷电机相连;推进器驱动电路使用无刷电调,通过按键电路对应按键触发内部程序设置的四个运行状态(启动、差速左转、差速右转、停止),stm32单片机通过引脚pa7输出pwm方波,控制无刷电机转速来实现不同运行状态。
24.推进器内设四个按键控制电路,其中,按键控制电路模块包括按键开关,按键开关的一端接地,按键开关的另一端分别与电阻r4的一端、stm32核心电路芯片相连,电阻r4的另一端与vcc_3.3v相连;按键控制电路中按下按键,引脚pb4/key1悬空变为低电平,触发内部程序进行推进器信号输出,实现救生装置的指定运行状态,key1分别对应启动、停止、差速左转、差速右转四个运行状态判定。其中,每个子按键电路中电阻r起限流保护电路的作用。
25.led驱动电路模块的1号引脚与电阻r1的一端相连,电阻r1的另一端接地,led驱动电路模块的2号引脚接地,led驱动电路模块的3号引脚、4号引脚均与vcc_12v相连,led驱动电路模块的5号引脚与发光二极管的正极相连,发光二极管的负极接地,led驱动电路模块的8号引脚与stm32核心电路芯片的16号引脚相连。led驱动电路使用电流调制集成电路cn5711,恒定输出电流达1.5a;电流调制集成电路cn5711所驱动led端电流通过一个外部电阻riset设置,电流范围为30ma至1.5a。当ce管脚为高电平,cn5711输入电压大于2.8v,并且大于led正向导通电压加上所需的压差时,cn5711正常工作,从led管脚输出恒定电流。在芯片使能端ce施加pwm信号,当pwm信号为高电平时,cn5711正常工作,led发光;当pwm信号为低电平时,cn5711被禁止工作,led也被关断,led停止发光。
26.救生器还包括图像功能模块,图像功能模块内设视角切换模块,视角切换模块的sig引脚与与导航功能模块的ch3引脚相连,视角切换模块分别与两个摄像头相连,视觉切换模块的信号输出引脚与图传模块的video_in引脚相连。
27.救生器还包括电源管理模块,电源管理模块分别与自锁开关、锂电池相连,电源管理模块分别输出vcc_12v、vcc_5v。
28.救生器还包括遥控功能模块,遥控功能模块的ch1引脚与主控模块的d5引脚相连,遥控功能模块的ch2引脚与主控模块的d6引脚相连,遥控功能模块的ch3引脚与图像功能模块的sig引脚相连,遥控功能模块的ch4引脚与照明功能模块的pwm引脚相连,照明功能模块均与两个led灯相连。
29.救生器还包括核心板翻转模块,核心板翻转模块的sign引脚与主控模块的d12引脚相连。
30.当装置发生意外倾覆时,通过mpu6050姿态传感器实时回传的角度数据判定船体已发生倾覆,arduino主控模块驱动舵机翻转核心板安装内腔,保证导航功能模块能够正常运行。(导航模块内部包含三个子模块:gps模块、导航模块、2.4g信号接收模块,其中gps模块与导航模块必须保持相对船体的水平正面朝上状态,以保证2.4g遥控功能模组能够正常运行)
31.本智能救生装置具备人体感应开启、gps定位、远程遥控、一键返航、led照明、远程视频等多种功能,操控效果好。
32.在载人状态下,使用者进入救生器的u型区域内,人体感应开关开启,装置上电,通过左右两侧按键控制装置各个运行状态。
33.远程遥控状态下,通过遥控器摇杆控制救生装置实现各个运行状态,进行远程机动,支持按键一键返航。
附图说明
34.图1为本实用新型的立体图。
35.图2为本实用新型的正面结构示意图。
36.图3为本实用新型的背面结构示意图。
37.图4为图3中a
‑
a的剖视图。
38.图5为stm32核心电路芯片的电路图。
39.图6为gsm通讯模块的电路图。
40.图7为传感器模块的电路图。
41.图8为左推进器电路模块的电路图。
42.图9为右推进器电路模块的电路图。
43.图10为按键控制电路的电路图。
44.图11为led驱动电路模块的电路图。
45.图12为主控模块的电路图。
46.图13为导航姿态模块的电路图。
47.图14为图像功能模块的电路图。
48.图15为电源管理模块的电路图。
49.图16为核心板翻转模块的电路图。
50.图17为遥控功能模块的电路图。
51.图18为照明功能模块的电路图。
52.图19为dc24
‑
12v的转换电路图。
53.图20为dc24
‑
5v的转换电路图。
54.图21为dc24
‑
3.3v的转换电路图。
55.图22为人体感应开关的电路图。
56.图中,1为左外壳,11为左伸缩件,12为左推进器,13为左锂电池,14为左两路触摸感应模块,15为左触摸孔,16为摄像头,2为右外壳,21为右伸缩件,22为右推进器,23为右锂电池,24为右两路触摸感应模块,25为右触摸孔,26为led灯,3为金属舵机,4为导航外壳,5为中心板,6为gps模块,7为导航姿态模块。
具体实施方式
57.为了使本实用新型所要解决的技术问题、技术方案及有益效果更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。
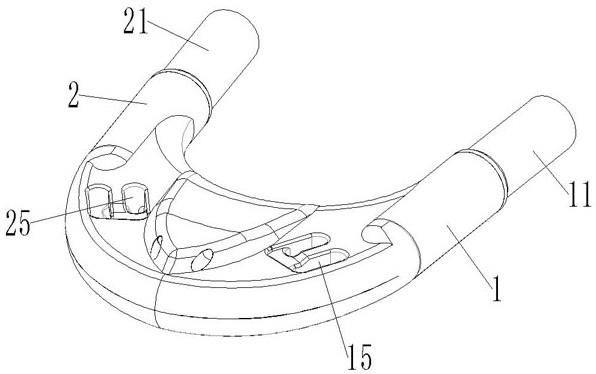
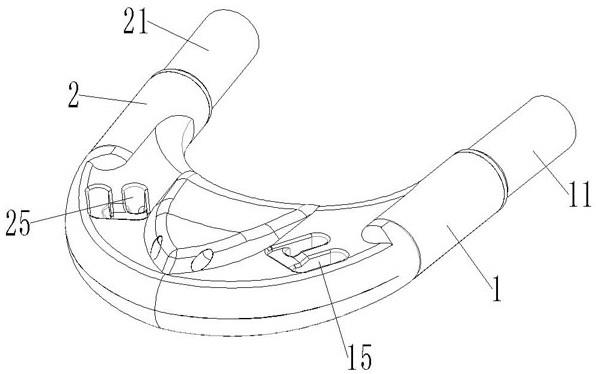
58.如图1
‑
4所示,智能救生器,包括对称布置的左外壳1和右外壳2,左外壳1的顶端与右外壳2的顶端铰接,在未工作情况下,左外壳1与右外壳2扣合在一起并通过锁扣锁紧,减
少存放空间,提升携带效率;在工作状态下,松开锁扣,将做外壳与右外壳2绕铰链展开,并再次锁紧锁扣,按下防水自锁开关,整机通电处于受遥控状态。左外壳1与右外壳2之间通过密封板固定,中间夹装有硅胶密封圈,左右两侧之间通过硅胶密封圈与环形凹槽相配合,保证了整机对折后的防水性能。
59.救生器上装有防水自锁开关,防水自锁开关安装在中心舱中轴线上部,为整机电源控制按键。
60.左外壳1的尾端装有左伸缩件11,左伸缩件11顶端设有多个圆柱凸起,多个圆柱凸起围绕左伸缩件11的中心轴呈圆周阵列排布,对应的左外壳1尾端腔内设有多个直条滑槽,直条滑槽尾端设计有螺纹型斜滑槽,螺纹型斜滑槽的数量与位置与左伸缩件11上的圆柱凸起吻合,可实现伸缩件展开锁紧功能。
61.左外壳1的尾端通过左端盖密封。
62.右外壳2的尾端装有右伸缩件21,右伸缩件21顶端设有多个圆柱凸起,多个圆柱凸起围绕右伸缩件21的中心轴呈圆周阵列排布,对应的右外壳2尾端腔内设有多个直条滑槽,直条滑槽尾端设计有螺纹型斜滑槽,螺纹型斜滑槽的数量、位置与右伸缩件21上的圆柱凸起吻合,可实现伸缩件展开锁紧功能。
63.右外壳2的尾端通过右端盖密封。
64.左伸缩件11内装有左推进器12,左推进器12为正浆推进器,实现正向推进。
65.右伸缩件21内装有右推进器22,右推进器22为反桨推进器,实现反向推进。
66.左外壳1的顶端的电池舱内装有左锂电池13,右伸缩件21的电池舱内装有右锂电池23,左锂电池13与右锂电池23均为6s
‑
6000mah锂电池,左锂电池13与右锂电池23为整机提供电源。
67.左外壳1的顶端内装有左两路触摸感应模块14,左外壳1上开有左触摸孔15,左触摸孔15置于左两路触摸感应模块14的上方,左触摸孔15内的按键与左两路触摸感应模块14电连接;右外壳2的顶端内装有右两路触摸感应模块24,右外壳2上开有右触摸孔25,右触摸孔25置于右两路触摸感应模块24的上方,右触摸孔25内的按键与右两路触摸感应模块24电连接。通过手指按压左触摸孔15、右触摸孔25来操作救生器的工作,快捷方便。
68.左外壳1上装有两个fpv摄像头16,摄像头16后侧设有视角切换模块和5.8g图传模块安装位,用于两路fpv图像的切换控制与图像实时回传。
69.右外壳2上装有两个led灯26,用于提供整机的照明。
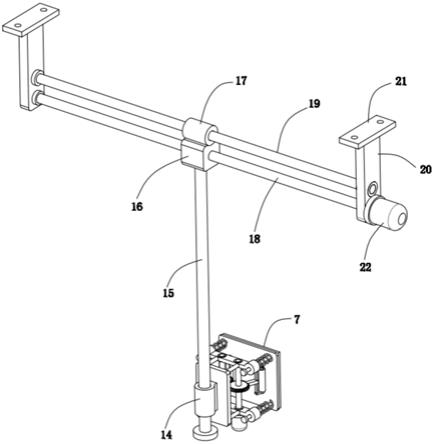
70.左外壳1与右外壳2的连接处开有中心舱,中心舱内装有金属舵机3和导航外壳4,导航外壳4内装有中心板5,中心板5的一端通过轴承支撑在导航外壳4内,中心板5的另一端通过中心轴与金属舵机3的输出轴相连,中心板5上装有gps模块6和导航姿态模块7,gps模块6和导航姿态模块7能够始终保证相对水面的水平向上位置,保持整机的远程操作基础。
71.左伸缩件11与左外壳1的尾端之间通过o型圈密封,右伸缩件21与右外壳2的尾端之间通过o型圈密封。
72.救生器还包括stm32单片机核心电路芯片、gsm通讯模块、adxl345传感器模块、左推进器电路模块、右推进器电路模块、按键控制电路模块和led驱动电路模块。
73.如图5和图6所示,gsm通讯模块的1号引脚与vcc_5v相连,gsm通讯模块的2号引脚接地,gsm通讯模块的3号引脚与stm32核心电路芯片的31号引脚相连,gsm通讯模块的的4号
引脚与stm32核心电路芯片的30号引脚相连。gsm通讯模块实时采集位置数据,通过pa9和pa10与stm32单片机进行数据通讯,提供航行所需航向与定位数据,并为一键返航功能提供数据基础。
74.如图7所示,adxl345传感器模块的1号引脚与stm32核心电路芯片12号引脚相连,传感器模块的2号引脚与stm32核心电路芯片的13号引脚相连,传感器模块的6号引脚与vcc_5v相连,传感器模块的8号引脚接地。adxl345传感器模块采用倾角传感器,实时检测救生装置整体的姿态信息,通过i2c数字接口(pa2/sda和pa1/scl)传输姿态数据至stm32单片机内,由内置程序判定救生装置当前姿态及救生装置是否发生倾翻。若检测到救生装置发生倾翻,则由内置程序切换运行控制程序,对按键对应控制功能进行对调,保证在倾翻后装置仍支持正常操作。
75.如图19
‑
22所示,dc稳压降压开关模块由dc24
‑
12v、dc24
‑
5v、dc24
‑
3.3v和人体感应开关组成。人体感应开关模块采用红外人体感知芯片,当未检测到u型体内部有人时,gnd/g_out处于断路状态,系统整体无电源供应;当检测到u型体内部有人时,gnd/g_out改变为闭合状态,主电源导通,使用三块hw
‑
613模块分别对24v电源进行降压处理,输出12v、5v与3.3v共三路对系统各个功能模块进行供电。
76.如图8所示,左推进器12电路模块包括左无刷电调模块,左无刷电调模块的1号引脚与vcc_12v相连,左无刷电调模块的2号引脚接地,左无刷电调模块的3号引脚与stm32核心电路芯片的17号引脚相连,左无刷电调模块的4号引脚接地,左无刷电调与左无刷电机相连;推进器驱动电路使用无刷电调,通过按键电路对应按键触发内部程序设置的四个运行状态(启动、差速左转、差速右转、停止),stm32单片机通过引脚pa6输出pwm方波,控制无刷电机转速来实现不同运行状态。
77.如图9所示,右推进器22电路模块包括右无刷电调模块,右无刷电调模块的1号引脚与vcc_12v相连,右无刷电调模块的2号引脚接地,右无刷电调模块的3号引脚与stm32核心电路芯片的18号引脚相连,右无刷电调的4号引脚接地,右无刷电调与右无刷电机相连;推进器驱动电路使用无刷电调,通过按键电路对应按键触发内部程序设置的四个运行状态(启动、差速左转、差速右转、停止),stm32单片机通过引脚pa7输出pwm方波,控制无刷电机转速来实现不同运行状态。
78.推进器内设四个按键控制电路,如图10所示,按键控制电路模块包括按键开关,按键开关的一端接地,按键开关的另一端分别与电阻r4的一端、stm32核心电路芯片相连,电阻r4的另一端与vcc_3.3v相连;按键控制电路中按下按键,引脚pb4/key1悬空变为低电平,触发内部程序进行推进器信号输出,实现救生装置的指定运行状态。key1分别对应启动、停止、差速左转、差速右转四个运行状态判定。其中,每个子按键电路中电阻r起限流保护电路的作用。
79.如图11所示,led驱动电路模块的1号引脚与电阻r1的一端相连,电阻r1的另一端接地,led驱动电路模块的2号引脚接地,led驱动电路模块的3号引脚、4号引脚均与vcc_12v相连,led驱动电路模块的5号引脚与发光二极管的正极相连,发光二极管的负极接地,led驱动电路模块的8号引脚与stm32核心电路芯片的16号引脚相连。led驱动电路使用电流调制集成电路cn5711,恒定输出电流达1.5a;cn5711所驱动led端电流通过一个外部电阻riset设置,电流范围为30ma至1.5a。当ce管脚为高电平,cn5711输入电压大于2.8v,并且大
于led正向导通电压加上所需的压差时,cn5711正常工作,从led管脚输出恒定电流。在芯片使能端ce施加pwm信号,当pwm信号为高电平时,cn5711正常工作,led发光;当pwm信号为低电平时,cn5711被静止工作,led也被关断,led停止发光。
80.如图14所示,救生器还包括图像功能模块,图像功能模块内设视角切换模块,视角切换模块的sig引脚与与导航功能模块的ch3引脚相连,视角切换模块分别与两个摄像头16相连,视觉切换模块的信号输出引脚与图传模块的video_in引脚相连。两路fpv摄像头16通过video引脚将图像数据传输至视角切换模块,视角切换模块通过out引脚将图像数据传输至5.8g图传模块,实现远程图像传输。其中视角切换模块通过引脚sig与2.4g遥控功能模组ch3引脚相连,当遥控器远程操控时,ch3引脚输出pwm信号,视角切换模块变换out引脚输出的图像数据至5.8g图传模块,实现两路视频数据切换功能。
81.如图15所示,救生器还包括电源管理模块,电源管理模块分别与自锁开关、锂电池相连,电源管理模块分别输出vcc_12v、vcc_5v。
82.如图12、图17、图18所示,救生器还包括遥控功能模块,遥控功能模块的ch1引脚与主控模块的d5引脚相连,遥控功能模块的ch2引脚与主控模块的d6引脚相连,遥控功能模块的ch3引脚与图像功能模块的sig引脚相连,遥控功能模块的ch4引脚与照明功能模块的pwm引脚相连,照明功能模块均与两个led灯26相连。
83.如图16所示,救生器还包括核心板翻转模块,核心板翻转模块的sign引脚与主控模块的d12引脚相连。
84.如图13所示,当装置发生意外倾覆时,通过mpu6050姿态传感器实时回传的角度数据判定船体已发生倾覆,arduino主控模块驱动舵机翻转核心板安装内腔,保证导航功能模块能够正常运行。(导航模块内部包含三个子模块:gps模块6、导航模块、2.4g信号接收模块,其中gps模块6与导航模块必须保持相对船体的水平正面朝上状态,以保证2.4g遥控功能模组能够正常运行)。通过gps模块6提供的坐标信息,功能模组可实现装置与遥控器之间的一键返航功能。
85.在运输及存放过程中,整机处于折叠且推进器收缩的状态;当使用时,将左右两个推进器拉伸并旋转锁紧,左右两部分沿对折处展开,使用锁扣锁紧,按下防水自锁开关,整机通电,在远程遥控状态下,2.4g信号接收模块接收遥控器控制信号,与导航姿态模块7、gps模块6进行数据通讯实现整机的航向、位置、航速的感知,并通过pwm信号驱动推进器实现各个运动功能,在此过程中,arduino nano单片机和mpu6050实时采集中心舱内中心板5与水平面的角度信息,当整机发生倾覆翻面时,单片机控制舵机带动中心板5旋转180
°
,以此保证gps模块6与导航姿态模块7的水平向上状态。在载人状态下,人员可通过正面设置的两块两路触摸感应模块控制整机的基本运动功能。照明图像功能只在远程遥控下应用,照明功能使得整机可在夜间进行视觉定位,图像功能可实时将整机视角传输至操作员一侧,便于精准寻找被救人员或目标。
86.以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包在本实用新型范围内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。