1.本实用新型涉及机器人领域,具体涉及一种采用了铰链连接前后车体的移动机器人。
背景技术:
2.随着科技的不断发展和进步,机器人的应用正在以惊人的速度向航天、军事、服务、娱乐等人类生活的各个领域渗透。于此同时,人们的生活节奏日益加快,很多时候需要主动的对异地的亲人动态进行观察甚至与之视频交流; 但是目前观察异地亲人的情况通常是依靠家庭监控摄像头,而且是固定安装,难以有效实现主动观察的目的;而视频聊天则是依赖手机视频聊天功能,同样不能实现主动与亲人聊天的目的,更不能实现对亲人状态的观察。
技术实现要素:
3.为解决上述技术缺陷,本实用新型采用的技术方案在于,提供一种由带驱动装置的铰链连接前后车体的机器人,包括车体、支架和信息采集装置,所述信息采集装置固定在所述支架上,用于采集其所在现场的影音信息;所述支架设置在所述车体中部,用于固定所述信息采集装置并协同所述车体完成对所述信息采集装置的空间位置与角度调节;所述车体用于承载所述信息采集装置进行移动。
4.所述车体包括前车体、后车体、车体铰链,所述前车体前端两侧各安装一个车轮,所述后车体后端两侧各安装一个车轮,所述车体铰链位于车体中部,并连接所述前车体与所述后车体。
5.所述前车体后端通过所述车体铰链与所述后车体的前端连接,所述车体铰链具有驱动装置可以使所述前车体与所述后车体产生相对的旋转运动,实现所述车体的折叠。
6.所述车体折叠时,所述前车体与所述后车体上安装的车轮之间距离缩短,而所述车体的中部向上拱起。
7.所述车体的运动是由所述前车体与所述后车体上的四个车轮的转动实现的,车体上车轮的安装可以采用三种不同方案。
8.方案1,所述前车体的两个车轮与驱动电机连接作为驱动轮,所述前车体的两个车轮固定连接在驱动电机的输出轴上,而驱动电机安装在所述前车体上,而所述后车体上的两个车轮则安装在所述后车体上作为随动轮。
9.方案2,所述后车体的两个车轮与驱动电机连接作为驱动轮,所述后车体的两个车轮固定连接在驱动电机的输出轴上,而驱动电机安装在所述后车体上,而所述前车体上的两个车轮则安装在所述前车体上作为随动轮。
10.方案3,所述前车体和所述后车体的所有四个车轮都固定连在驱动电机的输出轴上,作为驱动轮,而驱动电机则安装在所述车体上。
11.方案3中,进一步的,四个车轮优选为麦克纳姆轮,使车体具备包括横向移动在内
的运动能力。
12.所述车体内安装机器人控制器、电池及其它机器人运行的必要设备。
13.所述支架包括连杆与固定架,所述连杆两端分别连接上旋转铰链与下旋转铰链,所述上旋转铰链与下旋转铰链都具有驱动装置;所述连杆一端通过所述上旋转铰链连接所述固定架,所述连杆另一端通过所述下旋转铰链连接所述车体。
14.进一步的,所述连杆可以分割为上旋转铰链连杆与下旋转铰链连杆两部分,所述上旋转铰链连杆与所述下旋转铰链连杆之间通过一个带驱动装置的摇头铰链连接,所述的上旋转铰链连杆可以绕着所述摇头铰链的旋转轴相对下旋转铰链连杆转动;所述上旋转铰链连杆两端分别连接所述上旋转铰链与所述摇头铰链,而所述下旋转铰链连杆两端分别连接所述下旋转铰链与所述摇头铰链。
15.所述固定架是一个安装固定所述信息采集装置的支架;进一步的,固定支架上可以安装附加的机器人需要用到的传感器。
16.所述信息采集装置,包括视频与音频采集装置,用于实现影音信息的采集;进一步的,可以附加视频显示装置与扬声器装置,配合通信设备与必要的工具软件以便实现视频聊天功能;再进一步的,所述采集装置优选为具有显示屏幕的智能终端,包括智能手机与平板电脑。
17.与现有的技术相比,本实用新型的优势在于:操作本实用新型提供的机器人,具备了主动观察与主动找到亲人发起视频聊天的能力;并且所述车体采用驱动装置的车体铰链连接的方式连接所述的前车体与所述后车体的结构方案,可以通过调节所述车体的形态使机器人具备了优秀的机动性,能够翻越传统轮式机器人所不能越过的障碍;同时在所述车体折叠时,所述车体中部自然拱起,起到了带动所述支架高度上升的作用,进而提高了所述信息采集装置所在位置的高度,使机器人能够更好的适应主动观察与视频聊天的任务需求。
附图说明
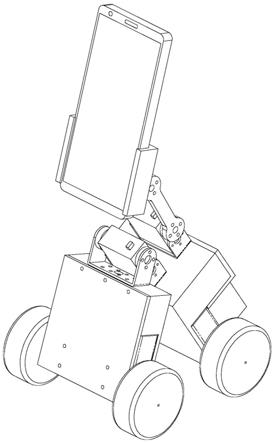
18.图1为实施例1示意图。
19.图2为实施例1结构示意图1。
20.图3为实施例1结构示意图2。
21.图4为实施例1结构示意图3。
22.图5为实施例1结构示意图4。
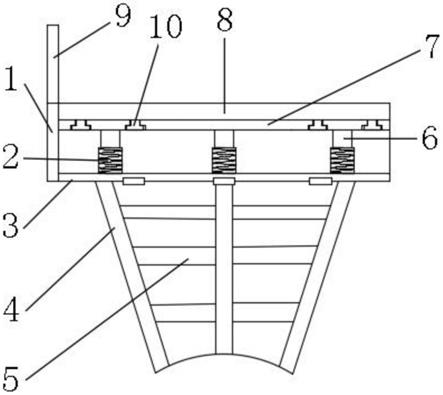
23.图6为实施例1结构示意图5。
24.图7为实施例2结构示意图1。
25.图8为实施例2结构示意图2。
具体实施方式
26.下面结合附图对本实用新型的实施例作详细说明,有必要在此指出的是实施例只用于对本发明进行进一步说明,不能理解为对本发明保护范围的限制。
27.实施例1:
28.本实用新型所述的基于铰接车体的移动机器人,包括车体、支架和信息采集装置
3,所述信息采集装置3固定在所述支架上,用于采集其所在现场的影音信息;所述支架设置在所述车体中部,用于固定所述信息采集装置3并协同所述车体完成对所述信息采集装置3的空间位置与角度调节;所述车体用于承载所述信息采集装置3进行移动。
29.如图4所示,所述车体包括前车体11、后车体12、车体铰链,所述前车体11前端两侧各安装一个车轮112,所述后车体12后端两侧各安装一个车轮122,所述车体铰链优选为舵机13,位于车体中部,并连接所述前车体11与所述后车体12。
30.如图2、图4所示,所述前车体11后端安装固定舵机支架151,而舵机支架151则连接到舵机13输出轴上,所述后车体12前端安装固定舵机支架152,而舵机支架152则安装到舵机13的机身上,在舵机13的输出轴旋转时即可带动舵机支架151绕舵机13输出轴相对舵机支架152旋转,进而驱动所述前车体11与所述后车体12产生相对的旋转运动,实现所述车体的折叠。
31.所述车体的运动是由所述前车体11与所述后车体12上的四个车轮的转动实现的,如图4所示,所述前车体11的两个车轮112安装在两个驱动电机113的输出轴作为驱动轮,而所述后车体12的两个车轮122安装在两个驱动电机123的输出轴上作为驱动轮。
32.所述车体,即所述前车体11与所述后车体12内安装机器人控制器、电池及其它机器人运行的必要设备。
33.如图4、图6所示,所述支架包括连杆21与固定架22,所述连杆21两端分别连接上旋转铰链与下旋转铰链,所述上旋转铰链与下旋转铰链都具有驱动装置;这里所述的上旋转铰链优选为舵机211,舵机211的输出轴连接在所述连杆21的一端,舵机支架2111安装在舵机211机身上,而固定架22则安装在舵机支架2111上;这里所述的下旋转铰链优选为舵机212,舵机212的输出轴连接在所述连杆21的另一端,舵机支架2121安装在舵机212机身上,而舵机支架2121固定连接在所述后车体12上。
34.信息采集装置3优选为智能手机,且信息采集装置3固定在固定架22上。
35.所述车体折叠时,所述前车体11与所述后车体12上安装的车轮距离缩短,而所述车体的中部向上拱起;此时所述信息采集装置3的高度也随之提高,便于实现信息采集装置3实现主动观察与视频聊天的任务需求。
36.实施例2:
37.实施例2与实施例1相比,其区别局限在所述连杆21的结构上。
38.连杆21由上旋转铰链连杆213与下旋转铰链连杆214,以及连接所述旋转铰链连杆213与所述下旋转铰链连杆214的带驱动装置的铰链组成;所述铰链优选为舵机215。
39.舵机215 安装在所述下旋转铰链连杆214上,舵机215的输出轴则与上旋转铰链连杆213固定连接;舵机215的输出轴旋转即可带动上旋转铰链连杆213及附着其上的信息采集装置3随之转动;以便于信息采集装置3能够获得更好的工作条件。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。