1.本技术涉及混凝土运输设备领域,尤其是涉及一种隧道施工用行走式送料罐车。
背景技术:
2.在铁路、地铁等需要进行隧道施工的工程中,混凝土罐车无法直接开进隧道内,一般将混凝土罐车内的混凝土料泵送到隧道内进行施工。然而隧道过长,施工工程较大,送料管经常发生堵塞,且不便疏通,极大的影响了施工进程。
3.现有的运输小车大多为人力小推车,包括车轮、置物槽和推把,车轮转动连接在置物槽下方,推把焊接在置物槽一侧,在使用时,一般将物料放置在置物槽内,然后推动推把,使得车轮带动置物槽沿隧道方向运动,将置物槽内的物料运输至施工位置,之后抬动推把将置物槽内的物料倒在物料收集区域。
4.针对上述中的相关技术,发明人认为隧道内路况较差,地面凹凸不平,光照不足,很容易撞到石块;同时在置物槽倒料时,需要整体抬动小推车,推把很容易砸到工作人员,不仅费时费力,且安全隐患较大。
技术实现要素:
5.为了便于隧道内物料的运输,并减少送料过程中的安全隐患,本技术提供一种隧道施工用行走式送料罐车。
6.本技术提供的一种隧道施工用行走式送料罐车采用如下的技术方案:
7.一种隧道施工用行走式送料罐车,包括运输车以及设置在所述运输车上的储料罐、升降机构和自动卸料机构,所述运输车包括支撑座、支撑轮、照明灯和驱动组件,所述支撑轮设置有至少三个,且所述支撑轮均轴向平行并转动连接在所述支撑轮下方,所述照明灯沿周向设置在所述支撑座上,所述驱动组件设置在支撑座上且能够使得所述支撑轮转动;所述升降机构包括转轴和转动件,所述储料罐轴向与支撑座平行,并通过所述转轴转动连接在所述支撑座上,所述转轴靠近储料罐任一端部设置,且与所述储料罐轴向垂直,所述储料罐上开设有靠近转轴一端设置的出料口,所述转动件能够使得所述储料罐沿转轴转动;所述自动卸料机构包括封堵盖和连杆,所述封堵盖能够紧抵在所述出料口上,并铰接在所述储料罐上,所述连杆一端与封堵盖铰接,另一端铰接在所述支撑座上,且所述封堵盖和连杆的铰接轴均与所述转轴平行。
8.通过采用上述技术方案,对隧道内输送混凝土时,将混凝土泵送到储料罐内,调节驱动组件使得支撑轮转动,进而使得支撑座带动储料罐沿隧道运动,直至到达施工位置,调节转动件,使得储料罐沿转轴转动,并使得出料口一端低于另一端,在储料罐转动的过程中,连杆向靠近出料口一端转动,进而使得封堵盖远离出料口,储料罐内的混凝土沿出料口流出进行卸料;设置的照明灯,为运输车在隧道内运输时提供照明,便于避开隧道内各种石块;设置的转轴、转动件、封堵盖和连杆,能够通过储料罐沿转轴的转动使得储料罐倾斜进行卸料,无需人力抬动推车,省时省力,且通过储料罐的角度对进料口进行封闭和开启,便
于卸料,减少了运料时的安全隐患。
9.可选的,所述转动件包括固定杆、转槽、滑轨、滑动块和驱动部,所述滑轨与储料罐轴向平行设置在所述支撑座上,所述滑动块滑动连接在所述滑轨上,所述转槽转动连接在所述滑动块上,所述固定杆固设在所述储料罐上,并能够沿所述转槽滑动,所述驱动部能够使得所述滑动块沿滑轨滑动。
10.通过采用上述技术方案,储料罐进行卸料时,调节驱动部并使得滑动块带动转槽沿滑轨向靠近转轴方向滑动,转槽带动固定杆眼转槽滑动并逐渐趋于水平,进而使得储料罐在固定杆的作用下沿转轴转动进行卸料;设置的固定杆、转槽、滑轨、滑动块和驱动部,通过滑动块沿滑轨的滑动实现储料罐的转动,通过固定杆沿转槽的滑动,一方面加强储料罐与转槽之间的连接强度,另一方面能够通过固定杆的滑动降低储料罐的转动速度,使得储料罐的卸料和复位更加稳定,提高卸料时的安全性。
11.可选的,还包括清料机构,还包括清料机构,所述清料机构包括清料盘和螺杆,所述清料盘同轴设置在所述储料罐内腔,且所述清料盘轴向侧壁能够抵接在所述储料罐内壁,所述螺杆与清料盘轴向平行且一端穿入所述储料罐,并与所述清料盘螺纹连接,另一端与所述储料罐转动连接,所述清料盘能够仅沿螺杆轴向运动。
12.通过采用上述技术方案,在储料罐倾斜卸料时,调节螺杆转动,使得清料盘沿螺杆轴向向靠近出料口方向运动,并将粘连在储料罐内壁上的混凝土刮除,并推动储料罐内的混凝土沿出料口卸料;设置的清料盘和螺杆,能够在卸料时,通过卸料盘从远离出料口一端到靠近出料口一端的运动,便于对储料罐内壁进行清理,有利于将储料罐内的混凝土完全推出储料罐,避免混凝土粘连在储料罐内壁,难以清理;通过导向件避免清料盘随螺杆的转动而转动,保证了清料盘沿螺杆轴向的运动。
13.可选的,所述清料机构还包括刷板和设置在所述刷板上的刷毛,所述刷板设置在所述清料盘靠近出料口一侧,并使得所述刷毛紧抵在所述螺杆上,且所述螺杆远离所述支撑座方向设置。
14.通过采用上述技术方案,设置的刷板和刷毛,能够在清料盘随螺杆转动而沿螺杆运动的过程中,对螺杆的螺纹缝隙进行清理,避免螺杆得到螺纹堵塞或自固,保证清料盘与螺杆的螺纹连接,有利于清料盘的运动。
15.可选的,所述转动件还包括托板,所述托板设置在储料罐底壁,且所述固定杆固设在所述托板上。
16.通过采用上述技术方案,设置的托板,通过托板对储料罐进行支撑,增加与储料罐的连接点,限制储料罐的转动角度,在储料罐卸料或复位时对储料罐进行支撑,使得储料罐的卸料过程更加稳定。
17.可选的,还包括防震机构,所述防震机构包括活塞杆和防震弹簧,所述活塞杆一端滑动连接在所述支撑座上,另一端抵接在所述储料罐上,所述防震弹簧设置在所述活塞杆上,且能够使得所述储料罐趋于远离支撑座。
18.通过采用上述技术方案,设置的活塞杆和防震弹簧,使得运输车在送料过程中更加稳定,适应隧道内凹凸不平的路况,减少储料罐与支撑座之间的刚性碰撞,避免对运输车上的机构造成损伤,增加两者之间的弹性运动空间,提高储料罐的使用寿命。
19.可选的,所述驱动组件包括plc控制器、红外线感应器、前进部件和转向部件,所述
红外线感应器均匀设置在所述支撑座周侧,并均与所述plc控制器电连接,所述前进部件设置在所述支撑座上且能够使得所述支撑轮转动,所述转向部件设置在所述支撑座上且能够使得所述支撑轮转向,所述驱动部、前进部件和转向部件均与所述plc控制器电连接。
20.通过采用上述技术方案,在进行送料时,通过远程调节plc控制器,使得前进部件启动,进而使得支撑轮转动并向隧道内运动,在送料过程中,通过红外线感应器感应隧道内遇到的障碍物,之后红外线将信号传递到plc控制器,plc控制器控制转向部件启动,使得支撑轮转动避开障碍物,直至运动至施工区域,调节plc控制器关闭前进部件,并启动驱动部使得滑动块沿滑轨滑动,进而使得储料罐进行卸料;设置的plc控制器,能够远程控制运输车自动驾驶、自动转向和自动卸料,减少人力,省时省力,通过红外感应器提前避开障碍物,减少运输车的碰撞,减少安全隐患。
21.可选的,所述封堵盖靠近出料口一侧设置有密封圈,所述密封圈内圈同轴设置有密封气囊,所述储料罐靠近出料口一端设置有弹性卡圈,所述弹性卡圈能够紧抵在所述密封圈与密封气囊之间。
22.通过采用上述技术方案,设置的密封圈、密封气囊和弹性卡圈,密封气囊伸入出料口并进行封堵,通过密封圈和弹性卡圈实现对出料口的密封,同时封堵盖与出料口之间无连接件,便于卸料时对出料口的开启和卸料结束时对出料口的封闭。
23.综上所述,本技术包括以下至少一种有益技术效果:
24.1.设置的照明灯,为运输车在隧道内运输时提供照明,便于避开隧道内各种石块;设置的转轴、转动件、封堵盖和连杆,能够通过储料罐沿转轴的转动使得储料罐倾斜进行卸料,无需人力抬动推车,省时省力,且通过储料罐的角度对进料口进行封闭和开启,便于卸料,减少了运料时的安全隐患;
25.2.设置的固定杆、转槽、滑轨、滑动块和驱动部,通过滑动块沿滑轨的滑动实现储料罐的转动,通过固定杆沿转槽的滑动,一方面加强储料罐与转槽之间的连接强度,另一方面能够通过固定杆的滑动降低储料罐的转动速度,使得储料罐的卸料和复位更加稳定,提高卸料时的安全性;
26.3.设置的清料盘和螺杆,能够在卸料时,通过卸料盘从远离出料口一端到靠近出料口一端的运动,便于对储料罐内壁进行清理,有利于将储料罐内的混凝土完全推出储料罐,避免混凝土粘连在储料罐内壁,难以清理;通过导向件避免清料盘随螺杆的转动而转动,保证了清料盘沿螺杆轴向的运动。
附图说明
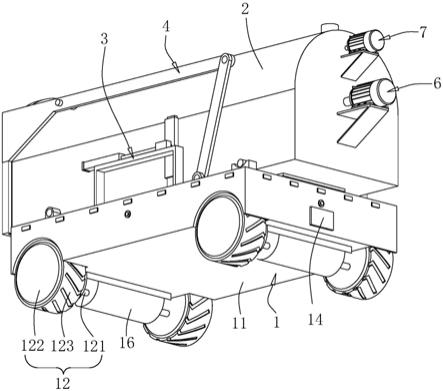
27.图1是本技术实施例隧道施工用行走式送料罐车的整体结构示意图。
28.图2是本技术实施例隧道施工用行走式送料罐车卸料时的工作状态图。
29.图3是转动件的结构示意图。
30.图4是自动卸料机构的结构示意图。
31.图5是防震机构处的结构示意图。
32.图6是储料罐的内部示意图。
33.附图标记说明:1、运输车;11、支撑座;12、支撑轮;121、支撑杆;122、转轮;123、履带;13、照明灯;14、plc控制器;15、红外线感应器;16、制动件;2、储料罐;21、进料管;3、升降
机构;31、转轴;32、卡位轴;33、转动座;34、搭接座;35、转动件;351、固定杆;352、转槽;353、滑轨;354、滑动块;355、托板;356、驱动部;4、自动卸料机构;41、封堵盖;42、安装架;43、连杆;44、密封圈;45、密封气囊;46、弹性卡圈;5、防震机构;51、防震板;52、活塞杆;53、防震弹簧;54、铰接杆;55、抵推块;56、滑杆;57、抵推弹簧;6、搅拌机构;61、搅拌电机;62、支架;63、搅拌轴;64、搅拌叶片;7、清料机构;71、清料盘;72、螺杆;73、清理电机;74、刷板;75、刷毛。
具体实施方式
34.以下结合附图1
‑
6对本技术作进一步详细说明。
35.本技术实施例公开一种隧道施工用行走式送料罐车。参照图1和图2,隧道施工用行走式送料罐车包括运输车1、储料罐2、升降机构3、自动卸料机构4、防震机构5、搅拌机构6和清料机构7;储料罐2转动连接在运输车1上,搅拌机构6转动连接在储料罐2上,清料机构7滑动连接在储料罐2上,升降机构3设置在搅拌罐和运输车1之间,自动卸料机构4设置在运输车1上,防震机构5设置在搅拌罐与运输车1之间。
36.参照图1,运输车1包括支撑座11、支撑轮12、照明灯13和驱动组件,支撑轮12设置有两组,支撑轮12包括支撑杆121和同轴焊接在支撑杆121两端的转轮122,转轮122上包设有履带123,支撑座11底壁沿长度方向分布并焊接有两支撑座11,支撑杆121穿过支撑座11并与支撑座11通过轴承转动连接;照明灯13均匀安装在支撑座11的周侧侧壁上,驱动组件安装在支撑座11上。
37.参照图1和图2,驱动组件包括plc控制器14、红外线感应器15和制动件16,制动件16包括前进部件和转向部件,红外线感应器15均匀安装在支撑座11周侧,前进部件和转向部件均采用现有技术实现,前进部件使得转轮122转动,并使得两组支撑轮12独立驱动,转向部件使得两组支撑轮12独立转向。红外线感应器15、前进部件和转向部件均与plc控制器14电连接,plc控制器14控制前进部件驱动支撑轮12转动,红外线感应器15感应到障碍物并将信号传递到plc控制器14,plc控制器14随即控制转向部件转向避开障碍物。
38.参照图1,储料罐2轴向水平并垂直于支撑杆121设置在支撑座11上,且储料罐2包括圆弧段和连接段,连接段靠近支撑座11一侧设置,且储料罐2靠近运输车1一侧沿轴向的一端开设有出料口,储料罐2靠近出料口一端在长度方向上超出支撑座11设置,储料罐2上焊接连通有进料管21。
39.参照图2和图3,升降机构3包括转轴31、卡位轴32和转动件35,支撑座11顶壁焊接有转动座33和搭接座34,转动座33靠近出料口一端设置,转轴31和卡位轴32平行焊接在储料罐2底壁,且转轴31与支撑杆121平行,转轴31两端均通过转动座33转动连接在支撑座11上;搭接座34远离转动座33设置,且搭接座34上开设有嵌设卡位轴32的嵌槽,以减少储料罐2的偏位。
40.参照图3,转动件35包括固定杆351、转槽352、滑轨353、滑动块354、托板355和驱动部356,托板355垂直于储料罐2轴向焊接在储料罐2底壁;固定杆351设置有两根,且固定杆351底端垂直焊接在托板355两端,转槽352设置为t形槽,固定杆351卡设并滑动连接在转槽352上,且转槽352长度方向与固定杆351长度方向平行。滑轨353与储料罐2轴向平行焊接在支撑座11上,并设置在储料罐2一侧,滑动块354卡设并滑动连接在滑轨353上,转槽352转动连接在滑动块354上,且转槽352的转动轴与转轴31平行;驱动部356采用液压缸,液压缸通
过螺栓固定在滑轨353上,且液压缸的输出轴焊接在滑动块354上。
41.参照图2和图4,自动卸料机构4包括封堵盖41、安装架42、连杆43和密封件,密封件包括密封圈44、密封气囊45和弹性卡圈46,密封气囊45同轴粘连在封堵盖41一侧,密封圈44与密封气囊45同轴且同侧粘连在封堵盖41上,密封气囊45设置在密封圈44内圈;封堵盖41于密封气囊45一侧紧抵在出料口上,密封气囊45伸入出料口设置;弹性卡圈46一侧同轴粘连在储料罐2靠近出料口一端,另一侧紧抵在密封圈44与密封气囊45之间。安装架42与封堵盖41一体设置并铰接在沿出料口轴向的两侧,连杆43一端与安装架42远离封堵盖41一端铰接,另一端铰接在支撑座11上,且封堵盖41和连杆43的铰接轴均与转轴31平行。
42.参照图5,防震机构5包括防震板51、活塞杆52、防震弹簧53、铰接杆54、抵推块55、滑杆56和抵推弹簧57,活塞杆52设置有两根并均匀设置在出料罐沿轴向的两侧,且活塞杆52一端沿竖直方向滑动连接在支撑座11上,另一端焊接在防震板51底壁,防震板51远离活塞杆52一侧抵接在储料罐2远离转轴31一端的底壁上,防震弹簧53套设在活塞杆52上,弹簧一端焊接在支撑座11上,另一端焊接在防震板51上,且防震弹簧53能够使得储料罐2趋于远离支撑座11。防震板51于储料罐2轴向的下方焊接有铰接座,铰接杆54设置有两根,且一端均铰接在铰接座上,另一端分别铰接在两抵推块55上,且铰接杆54的铰接轴与储料罐2轴向平行;支撑座11上开设有开槽,滑杆56与转轴31平行且两端均焊接在开槽内壁,抵推块55滑动连接在滑杆56上,抵推弹簧57设置有两根,并套设在滑杆56于两抵推块55与开槽内壁之间,抵推弹簧57一端焊接在抵推块55上,另一端焊接在开槽内壁上,并使得两抵推板趋于互相靠近。
43.参照图6,搅拌机构6包括搅拌电机61、支架62、搅拌轴63和搅拌叶片64,搅拌轴63沿储料罐2轴向伸入储料罐2内并与储料罐2转动连接,支架62一段焊接在搅拌罐内腔的顶壁上,另一端转动连接在搅拌轴63伸入储料罐2一端,搅拌叶片64均匀焊接在搅拌轴63伸入储料罐2部分,搅拌电机61通过螺栓固定在储料罐2上,且搅拌电机61的输出轴通过联轴器同轴连接在搅拌轴63上,搅拌电机61与plc控制器14电连接。
44.参照图1,清料机构7包括清料盘71、螺杆72、清理电机73、刷板74和刷毛75,清料盘71设置为环状并同轴设置在储料罐2内腔,且清料盘71轴向侧壁能够抵接在储料罐2内壁;螺杆72与清料盘71轴向平行且不同轴设置,螺杆72远离支撑座11方向设置,螺杆72一端穿入储料罐2,并与清料盘71螺纹连接,且转动连接在支架62上,另一端穿出储料罐2并与储料罐2转动连接;清理电机73通过螺栓固定在储料罐2上,且清理电机73的输出轴通过联轴器同轴连接在螺杆72穿出储料罐2一端,清理电机73与plc控制器14电连接。刷板74设置为弧形并焊接在清料盘71靠近出料口一侧,刷毛75粘接在清料盘71上并使得刷毛75紧抵在螺杆72上。
45.本技术实施例一种隧道施工用行走式送料罐车的实施原理为:
46.对隧道内输送混凝土时,将混凝土通过进料管21泵送到储料罐2内;调节plc控制器14控制制动件16使得前进部件启动,进而使得运输车1带动储料罐2沿隧道运动,在送料过程中,通过红外线感应器15感应隧道内遇到的障碍物,之后红外线将信号传递到plc控制器14,plc控制器14控制转向部件启动,使得支撑轮12转动避开障碍物,直至到达施工位置。
47.调节液压缸启动,液压缸带动滑动块354沿滑轨353滑动,进而带动转槽352沿滑轨353向靠近转轴31方向滑动,转槽352带动固定杆351眼转槽352滑动并逐渐趋于水平,进而
使得储料罐2在固定杆351的作用下沿转轴31转动,并使得出料口一端低于另一端;在储料罐2转动的过程中,连杆43向靠近出料口一端转动,进而使得封堵盖41远离出料口,使得出料口开启,储料罐2内的混凝土沿出料口流出进行卸料。之后启动清理电机73,使得清理电机73的输出轴带动螺杆72转动,使得清料盘71沿螺杆72轴向向靠近出料口方向运动,并将粘连在储料罐2内壁上的混凝土刮除,并推动储料罐2内的混凝土沿出料口卸料。
48.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。