1.本发明涉及一种机动车前照灯,包括:至少一个激光光源;转换机构,所述转换机构可由至少一个激光光源照射和激发以放射可见光;至少一个可控制的偏转设备,所述偏转设备设置在至少一个激光源和转换机构之间的光路中用于在转换机构的可映射到光分布中的转换区域内对激光进行空间偏转;投影光学装置,所述投影光学装置用于将在转换区域内转换的光朝向可投影到面,尤其行车道上的光分布映射;和至少一个调制单元,所述调制单元
2.a)用于对由至少一个激光光源放射的光的激光强度进行时间上的控制,以及
3.b)用于控制偏转设备对激光的空间偏转,
4.其中为了数字化地实现时间上的控制,调制设备关联有微控制器。
5.本发明还涉及一种机动车,其包括至少一个根据本发明的机动车前照灯。
背景技术:
6.在现代的前照灯系统的发展中,重点通常是期望能够将光图像投影到行车道上,所述光图像能够快速改变并且适应相应的交通条件、道路条件和光条件。为此,使用不同的前照灯,例如主前照灯和附加前照灯,所述主前照灯和附加前照灯将不同的光图像投影到行车道上。术语“行车道”在此用于简化表示,因为这显然与光图像是实际位于行车道上还是也可在行车道之上延伸的位置条件相关。原则上,就使用而言,根据涉及机动车照明技术的相关标准,光图像对应于到竖直表面上的投影。
7.用于产生可变的光分布的机动车前照灯例如能够具有一个或多个放射强度可调制的光源,其中由此发射的光束能够经由可枢转的反射器单元投影到行车道上。
8.以调制所发射的光强度的形式操控光源,以及精确地操控枢转或反射器单元通常是复杂和困难的,因为例如在时间上无法精确同步的控制信号可能会在经投影的光图像的所不期望的损害中变得可察觉,这甚至会使遵守法律上的极限值变得困难。这种机动车前照灯的相应适合的操控可能是复杂且昂贵的。
9.迄今为止,借助于经由微控制器的控制还无法实现令人满意的同步。其原因在于,在微控制器中实现定时通常通过内部的硬件定时器来进行。所述硬件定时器会以所设定的频率进行计数,并且在达到预设值时触发中断。在此,主程序中断并且程序进程在另一位置处继续。在所述中断例程中,能够输出对于改变激光亮度所需的命令。但是,这种方法具有以下缺点:
10.1.在中断和继续主程序时的延时:
11.当主程序中断时,微控制器必须保护当前状态(程序地址 各种寄存器),以便在中断后能够继续执行主程序。该过程根据微控制器和时钟速率需要在定时中不可忽视的时间。由此,偏转单元的振荡频率和每周期待示出的像素的数量越高,就更大程度地影响图像示出。激光的亮度的改变由此不在像素边缘处发生,而是稍晚一些发生。当中断主程序的时间不总是持续同样长时(见图13),这会导致不准确的定时和抖动。
12.2.主程序无法并行地继续进行:
13.如果微控制器是具有仅一个cpu内核的变型形式,那么在中断例程正在进行的时间内不能执行其他动作(具有更高优先级的中断除外)。由此,中断发生得越频繁,主程序中的计算就越强地受影响。这限制了偏转单元的每个振荡周期可示出的像素的数量。换言之,利用微控制器的传统方法在于,将数据由输入输出单元转移到工作存储器中,并且使用处理器寄存器进行缓存。首先,由处理器数据读入内部寄存器中,以便随后在下一步中移至主存储器中。为此需要多个时钟步骤,在所述时钟步骤中处理器不用于执行其他指令,从而降低了正在运行的程序的执行速度。
14.出于该原因,迄今为止替代于微控制器经由fpga或asic进行操控对于光图像的高质量的示出是优选的。
技术实现要素:
15.本发明的一个目的是,克服现有技术中的缺点。
16.所述目的通过开头提到的用于操控机动车前照灯的方法实现,其中根据本发明,微控制器具有至少一个定时器和dma控制器,其中微控制器设立用于,根据定时器直接触发dma操作,借助于所述dma操作进行根据点a)和b)的时间和空间控制。
17.由此可行的是,执行根据点a)和b)的控制,无需在微控制器中触发中断例程,使得能够通过微控制器准确地遵循时钟并且与微控制器的主处理器的其他计算任务无关地保持精确同步。
18.直接存储器存取(dma,“direct memory access”)用于在工作存储器和外围设备之间传输数据,所述外围设备例如能够是单独构成的模块并且是概念性的电路措施和控制措施,其经由专门的数据线路建立在模块和工作存储器本身之间的连接。由此,数据能够不经过处理器绕行地直接写入存储器中,并且沿相反方向从存储器到模块,而较小地影响处理器的针对正在运行的程序的运行速度。换言之,dma引起处理器的减负。除了提高存储器密集型应用中的速度提高外,使用dma控制器还实现非常高的数据率。
19.通常存在仅一个真正的dma线路。在此根据索引区分不同模块的访问。据此,dma索引应当仅与一个设备关联。索引表明dma通道的编号。在一个实施方式中,例如能够设有8个dma通道。在此,例如通道0、2和4已经能够固定地分配用于内部目的而通道1、3、5、6和7能够自由占用。然而,通道也能够非常全面地配置和以8位、16位和32位单独地或逐段地进行转移。dma控制器已经集成在处理器或微控制器的现代的芯片组中。
20.为了尽可能精确地产生参考时间能够提出,微控制器100具有dma控制器和比较寄存器,其中微控制器100设立用于,将定时器与经由dma通道提供的数值进行比较,以便在确定数值相等时不触发中断操作而是触发dma操作,所述dma操作用于根据点a)和b)确定控制的时间顺序。
21.尤其能够提出,机动车前照灯具有至少两个激光光源,优选三个、四个、五个或更多个激光光源,所述激光光源设立用于,将光放射到偏转设备上从而放射到转换机构上,其中激光光源到转换机构上的放射相对于彼此错开,使得可通过激光光源的激光的水平和/或竖直偏转照亮在转换机构上的行列状地、形状配合地彼此并排设置的和/或上下叠置的转换区域,其中每个激光光源关联有转换区域的一个部段,其中用于偏转激光光源的激光
的偏转设备具有至少一个可控制的镜,其中尤其能够提出,设有多个可操控的镜,借助于所述镜能够单独地进行激光的偏转。
22.优选能够提出,机动车前照灯具有至少两个激光光源,所述激光光源设立用于将光放射到偏转设备上从而放射到转换机构上,其中激光光源到转换机构上的放射彼此竖直地错开,使得可通过激光光源的激光的水平偏转照亮在转换机构上的行列状地、形状配合地上下叠置的转换区域,其中每个激光光源关联有行列状的转换区域。
23.尤其能够提出,微控制器设立用于,将用于操控至少一个激光光源的至少一个亮度数据组经由数据总线串行地传输给调制单元,其中亮度数据组包含数据输入的字段,其中每个数据输入表示在激光光源的光分布的光图像中具有预设的高度和宽度的像素的期望亮度,其中每个激光光源关联有调制单元的光通道,其中共同的时钟信号经由时钟线路而控制信号经由控制线路输送给每个光通道,其中每个光通道关联有通道转换器,其中每个通道转换器设立用于,当控制信号经由与调制单元相关联的控制线路由微控制器接收时,在考虑时钟信号的情况下使至少一个亮度数据组由数据总线串行地接收并且将至少一个亮度数据组逐步地经由与每个通道转换器相关联的最终总线并行地传输。本发明能够包括两个、三个、四个、五个或更多个光通道。
24.优选能够提出,调制单元的每个最终总线关联有数模转换器,其中每个数模转换器设立用于,使至少一个亮度数据组由最终总线并行地接收并且转换为用于相应的激光光源的各一个模拟的驱动信号。在此尤其能够提出,每个数模转换器构成为r/2r网络。
25.优选能够提出,至少一个亮度数据组从微控制器经由串行外设接口到调制单元的传输经由数据总线进行。
26.换言之,关于本发明能够提及如下:
27.许多现代的微控制器都具有dma控制器。在此是协处理器,以便在从a到b复制存储器中的数据时使内核减负。例如,当在微控制器的外部接口(spi、uart等)上的处理大量数据时,使用该协处理器。由此,将数据复制到存储器地址上几乎不会影响主程序。
28.通过将不同的dma通道在一个链中串在一起的可行性,这有利于在调制激光亮度时使用。附加地,在微控制器中使用的定时器必须提供如下可行性:触发dma操作而不是中断。如果存在这些前提,那么能够实现如接下来以1d设计理念为例所描述的激光调制。
29.1)产生用于像素定时的参考时间:
30.对于产生参考时间,使用由定时器和dma通道构成的组合。借助于每个比较事件,像素定时信号被置为逻辑1,并且由dma通道将来自准备好的定时表的下一个值写入定时器的比较寄存器中。在此,dma通道配置为,使得其源地址在写入过程成功之后自动地设置为下一个表输入。
31.2)产生所期望的光分布
32.激光通道的调制由第二组dma操作进行,所述dma操作经由dma链接由像素定时触发。在此,dma通道将亮度数据逐列地从亮度数据的阵列中写入缓存中。该缓存用于下一步骤的数据的重新组合并且也能够根据内部结构省去。
33.在最后的步骤中,来自缓存中的数据由另一经链接的dma通道写到所设置的调制接口上。例如,这种接口能够是gpio引脚寄存器、pwm寄存器或诸如spi的通信接口。
34.所述类型的实现无需微控制器的内核的干预即可进行。由此,也消除了微控制器
关于命令的程序执行的一些限制。因此,这种实现对之前所描述的在产生所期望的光分布中的限制具有以下影响:
35.1.在中断和继续进行主程序时的延时更短:
36.因为主程序不必由于中断而暂停,所以定时器事件和经由dma通道执行动作之间的延时明显更短。
37.2.主程序能够并行当继续进行:
38.因为主程序不暂停,而是经由dma控制器进行dma通道的控制,所以主程序几乎不会受到负面影响。
39.由于激光亮度的所期望的和实际的切换之间的延时大幅缩短,在微控制器性能相同的情况下,每单位时间能够示出更多像素。替选地,能够在主程序中实现更复杂的算法,因为所述算法的性能几乎不受dma操作的影响。
40.所述设计理念的另一优点是仅受现有的dma通道和必要的操控频率限制的用于多个激光通道或2d设计理念的可扩展性,所述2d设计理念即如下设计理念,其中激光束能够沿着两个彼此垂直取向的轴线偏转。
附图说明
41.下面根据在附图中图解说明的非限制性的实施例详细描述本发明和进一步的优点。附图示出:
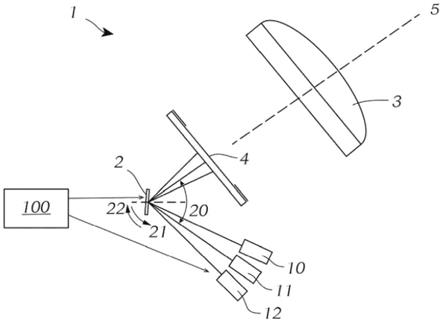
42.图1示出根据本发明的具有三个光源和可围绕轴线枢转的偏转设备的车辆前照灯,
43.图2示出根据图1的车辆前照灯的转换机构,所述转换机构具有呈光行列式的各个光通道,
44.图3示出按照根据本发明的前照灯以及方法的具有特征性的数据流的微控制器的一个实施例的电气框图,
45.图4示出用于将来自微控制器的光数据分配到光通道上的电路的一个实施例的电气框图,
46.图5示出借助于r/2r网络和用于光源的驱动电路的数模转换器的电路图,
47.图6示出偏转单元的镜偏转的时间上的变化,
48.图7示出偏转单元的反馈信号的时间上的变化,
49.图8示出偏转单元的镜偏转信号的时间上的变化,
50.图9示出具有所绘制的离散的子区域的偏转单元的镜偏转的时间上的变化,
51.图10示出同步信号的时间上的变化,
52.图11在放大的示图中示出同步信号的时间上的变化,
53.图12示出微控制器的定时器单元中的计数器值的时间上的变化,
54.图13示出不准确的定时的示例,例如作为常规的微控制器例程中的中断的结果。
具体实施方式
55.现在,参考图1至8详细阐述本发明的实施例。尤其示出对于本发明在前照灯中重要的部分,其中清楚的是,前照灯还包含许多其他未示出的部分,这些部分实现在机动车
中,如尤其汽车或摩托车中有意义的使用。因此,为了清楚起见,未示出例如用于构件的冷却设备、另外的操控电子装置、另外的光学元件、机械的调节装置或支架或壳体。在以下附图中——除非另有说明——相同的附图标记表示相同的特征。
56.图1示出机动车前照灯1,包括:三个激光光源10、11和12;可由激光光源10、11和12照射和激发以放射可见光的转换机构4;至少一个设置在激光光源10、11和12与转换机构4之间的光路中的可控制的偏转设备2,所述偏转设备用于在转换机构4的可映射到光分布中的转换区域40、41、42内对激光进行空间偏转;和投影光学装置3,所述投影光学装置用于将转换区域40、41、42内经转换的光朝向可投影到面上的光分布映射。此外,机动车前照灯1包括至少一个调整设备200,所述调制设备设立用于
57.a)对由激光光源10、11、12放射的光的激光强度进行时间控制,以及
58.b)控制偏转设备2对激光的空间偏转,
59.在此,为了时间控制的数字化的实现或改进,调制设备关联有微控制器100。根据本发明,微控制器100具有至少一个定时器和dma控制器,其中微控制器100设立用于,根据定时器直接触发dma操作,借助于所述dma操作进行根据点a)和b)的时间和空间控制。
60.换言之,图1示出车辆前照灯1,其中激光束由例如呈诸如激光二极管的半导体光源形式的光源10
‑
12产生,并且借助于偏转设备2偏转到转换元件4上并且随后偏转到车辆前照灯1的放射方向中,在所述放射方向中设置有例如呈一个或多个透镜的装置形式的投影光学装置3。偏转设备2例如构成为具有可控制的微镜的微偏转单元,所述微镜设立用于,使光源10
‑
12的激光束以偏转角20偏转。
61.附加地,转换元件4设置在偏转设备2和投影光学装置3之间的光路中,以便例如实现由光源10
‑
12产生的uv光或蓝色激光到白色可见光的转换。转换元件4能够构成为是透明的(透射的)或至少部分地反射的,尤其构成为磷光体。此外,车辆前照灯包括微控制器100,所述微控制器与光源10
‑
12和偏转设备2连接以操控所述光源和偏转设备。
62.换言之,设置用于装入车辆中的机动车前照灯1包括三个光源10
‑
12、偏转设备2、转换元件4和呈投影透镜形式的投影光学装置3,以及微控制器100和将在下面详细讨论的电子电路。
63.光源10
‑
12设立用于将光朝偏转设备2发射。偏转设备2设立用于,将所发射的光分布转向到转换元件4上并且然后转向到投影光学装置3上。偏转设备2可由控制设备借助于偏转参数组来配置。
64.图2示意性地示出具有转换面的转换元件4,经由所述转换面,一个或多个激光束非常快速地在水平方向上偏转(如在图2中由箭头所示),并且写入光图像,所述光图像经由投影光学装置3沿着放射方向5方向随后作为光分布投影到道路上。放射方向5例如能够通过零位来限定,在所述零位中偏转镜未被调整。
65.在图3中示出电子电路的框图,其中偏转设备2和三个光通道210
‑
212可由微控制器100操控。
66.本发明的其他实施方式能够包括一个、两个、四个、五个或更多个光通道。
67.所述电路示出微控制器100,其具有定时器单元110、存储器120、缓存130和外围控制设备140。清楚的是,微控制器100具有其他功能单元,例如算术逻辑单元、寄存器、通信接口、输入/输出接口、模数转换器、程序存储器等。
68.此外,微控制器100具有dma功能,其在图中未单独示出,但在下文中将详细描述。
69.微控制器100设置用于操控相应的光通道210
‑
212。图4和图5示出用于操控光通道210
‑
212的调制设备200的一个实施例。
70.各个光通道210
‑
212的光源10
‑
12借助于数模转换器220
‑
222来操控。
71.每个光通道210
‑
212能够由微控制器100经由并行的最终总线270
‑
272来操控,所述最终总线分别包括8条总线线路。
72.微控制器100具有数据接口或数据输出端,所述所述数据接口或数据输出端传输数据信号。
73.三个光通道210
‑
212分别包括通道转换器230
‑
232、数模转换器220
‑
222和光源10
‑
12。
74.在本示例中,通道转换器230
‑
232分别是移位寄存器,然而其中其他逻辑电路也能够适用于此,例如根据rs
‑
232或usb标准的数据总线。在此清楚的是,当多条线路连成数据总线,尤其串行总线时,可能分别需要电路逻辑,所述电路逻辑设立用于经由串行输入端接收串行信号,必要时存储所述串行信号并且经由串行输出端再次发送,从而实现经连接的串行总线。对于本领域技术人员清楚的是,能够为并行总线实现相应的结构,其中在实现并行总线时必须相应地考虑开头提到的缺点。
75.替选地,菊花链结构也可用于第二总线,在所述菊花链结构中串行输入端对应于连接到该结构上的组件的串行输出端。在此可能需要的是,例如逻辑电路执行接收到的串行数据与相应的光通道的关联。该变型形式未示出。
76.原则上,对于应用而言也能够是有意义的是,例如将并行总线用于第二总线。这尤其对于较高的传输速度能够是有意义的,使得能够可以忍受电路板上的并行总线的可能的较高的耗费。该变型形式未示出。
77.微控制器100设立用于,将用于操控光源10
‑
12的至少一个亮度数据组经由第二总线240串行地传输给三个光通道210
‑
212并且借助于时钟信号经由时钟线路251并且借助于控制信号经由控制线路260进行操控。
78.每个通道转换器230
‑
232设立用于,当控制信号经由控制线路260由微控制器100接收时,通过第二总线240借助于时钟线路的时钟信号串行地接收至少一个亮度数据组并且将至少一个亮度数据组经由与每个通道转换器230
‑
232相关联的最终总线270
‑
272并行地传输。
79.每个数模转换器220
‑
222设立用于,并行地从最终总线270
‑
272接收至少一个亮度数据组并且将其分别转换为用于光源10
‑
12的模拟的驱动器信号。
80.光源10
‑
12分别设立用于,借助于模拟的驱动信号经由驱动线路345被操控,并且光源10
‑
12的亮度根据模拟的驱动信号来控制。
81.此外,光源10
‑
12设立用于,使光朝偏转设备2发射,光从该处偏转,并且在装入车辆中的状态中,将光图像投影到车辆前方的行车道上。
82.所述设置也能够如下详细描述:
83.三个光通道210
‑
212中的每一个具有通道转换器230
‑
232、数模转换器220
‑
222和光源10
‑
12,其中
84.‑
相应的通道转换器230
‑
232具有数据输入端241
‑
243、时钟输入端和控制输入端,
并且设立用于,经由时钟输入端接收模块时钟信号451,并且经由控制输入端接收控制信号,并且借助于模块时钟信号451从数据输入端241
‑
243接收光数据,并且
85.‑
相应的通道转换器230
‑
232经由最终总线270
‑
272与相应的数模转换器220
‑
222连接,并且设立用于,借助于控制信号经由最终总线270
‑
272发送光数据,并且
86.‑
相应的数模转换器220
‑
222经由驱动线路345与光源10
‑
12连接并且设立用于,从最终总线270
‑
272接收光数据,将其转换为模拟的驱动信号并且经由驱动线路345输出,并且
87.‑
相应的光源10
‑
12设立用于,借助于由驱动线路345接收的模拟的驱动信号被操控并且以光分布的形式发射光,
88.并且微控制器100设立用于
89.‑
产生模块时钟信号451并且经由时钟线路251输出,所述时钟线路与时钟输入端连接,并且
90.‑
产生控制信号并且经由控制线路260输出,所述控制线路与控制输入端连接,并且
91.‑
以光数据的形式产生至少一个亮度数据组来操控至少一个光通道210
‑
212的光源10
‑
12并且经由与通道转换器230
‑
232的数据输入端241
‑
243连接的第二总线240借助于模块时钟信号和控制信号传输。
92.除了系统时钟信号450之外,包含在微控制器100中的时钟发生器115还产生用于运行通道转换器230
‑
232的模块时钟信号451。
93.系统时钟信号450也用于操控偏转设备2。
94.相应的通道转换器230
‑
232借助于第二总线240相继串联连接的三个光通道210
‑
212分别包含在前的通道转换器230、231并且分别包含跟随的通道转换器231、232。
95.相应在前的通道转换器230、231按顺序在相应跟随的通道转换器230、231之前设置在第二总线240上。
96.相应在前的通道转换器231、232具有数据输出端244、245,其借助于第二总线240与相应跟随的通道转换器231、232的串行数据输入端242
‑
243连接。
97.相应在前的通道转换器230
‑
232设立用于,借助于模块时钟信号451从数据输入端242、243接收光数据并且经由数据输出端244、245再次输出。
98.在该实施例中,第一总线270
‑
272是并行总线。
99.在该实施例中,第二总线240是串行总线。
100.在该实施例中,至少一个光通道210
‑
212的通道转换器230
‑
232分别是串并行转换器。
101.第一串并行转换器或通道转换器230按顺序作为第一个设置在串行总线或第二总线240上。
102.串并行转换器230
‑
232借助于串行总线240相继串联连接的三个光通道210
‑
212具有最后一个串并行转换器232。最后一个串并行转换器232按顺序作为最后一个设置在串行总线240上。
103.在该示例中,光通道210
‑
212均与相同的串行总线240连接。
104.图5示出借助于r/2r网络的数模转换器220
‑
222的一个优选的实施方案变型形式,
所述数模转换器将数字值转换为模拟电压,并且借助于由两个运算放大器340、341和功率晶体管350形成的驱动电路操控光源10。为了设定穿过在此呈激光二极管形式的光源10的电流,使用串联电阻器360。
105.r/2r电阻网络,后接一个或多个运算放大器340、341和用作为调制器的晶体管350,与例如集成电路相比,对于在车辆前照灯1中的所设置应用而言更简单且成本更低。
106.驱动线路345连接形成数模转换器220
‑
222的第一电路部分和形成光源10
‑
12的驱动器的第二电路部分。在该示例中,驱动线路345将这两个运算放大器340、341连接。
107.运算放大器340、341设置用于将第一电路部分与第二电路部分去耦。否则,当设置数字的输入信号时,即设置位时,最高数值的数字输入端10,即亮度数据组的最高位可能必须承担r/2r电阻网络220
‑
222的大部分的输出负载。
108.r/2r网络由值为r和2r的电阻320
‑
327和330
‑
338构造。各个数字输入端310
‑
317接地或位于参考电压上。因此,每个数字输入端为所产生的输出电压贡献其特定部分。
109.r/2r网络的优点包括在精度非常高的同时非常高的数模转换速度,以及由于相同类型的低成本的构件而产生的简单的构造。
110.但是,在r/2r网络中必须要注意的是,电阻的标称值是尽可能完全相同的。这尤其涉及用于较高数值的位的电阻。
111.图6示出偏转设备2的偏转角20的时间变化。在该变化中可看到具有正斜率的近似线性的区域25,所述区域对应于偏转设备2在第一方向21上的偏转,以及可看到具有负斜率的近似线性的区域25,所述区域对应于偏转设备2在第二方向22上的偏转。在具有正斜率和负斜率或第一和第二方向21、22的区域中,同时进行光源10
‑
12的操控,所述光源将光发射到偏转设备2上,并且所述光由偏转设备2转向到前照灯1的放射方向5中。
112.在从正斜率到负斜率或从第一方向到第二方向21、22的过渡区域以及反过来的过渡区域中分别存在偏转设备2的转折区域23。在转折区域23中,不进行光源10
‑
12的操控或调制。
113.图7示出数字反馈信号201的时间上的变化,所述数字反馈信号通过信号变化中的边沿限制偏转角20的正负斜率的近似线性的区域25,其中反馈信号201能够在产生光源10
‑
12的调制时使用。
114.图8示出数字的镜偏转信号202的时间上的变化,其通过镜偏转信号202的信号变化中的边沿从偏转角20的负斜率的区域起限界正斜率的区域,即限定偏转角20的变化的第一方向21的正斜率和第二方向22的负斜率之间的转折点24。
115.在图9中,示出具有正斜率的偏转角20的时间上的变化的一部分,其中附加地可看到组成所述变化的子部段。划分为子部段用于改进偏转设备2的偏转角20的偏转的不完全线性的变化25。通过将偏转设备2的偏转的时间上的变化划分为子部段,能够部分地校正实际的变化25相对于理想的线性变化26的偏差。
116.由此实现偏转角20的均匀区域,从而为观察者带来所产生的光图像的有利的光学印象。
117.图10示出与所提及的子部段相关的控制信号460的时间上的变化,并且图11示出图10的一部分的放大视图。例如,在控制信号460的上升沿的情况下分别达到为相应的子部段设置的偏转角20的实际值。通过实际值和相关的期望值之间的偏差产生控制信号460的
脉冲之间的不同的持续时间,所述持续时间优选分别具有恒定的脉冲持续时间。因此,能够实现根据实际的变化25的实际值相对于根据理想的变化26的相应的期望值的校正。
118.如果不执行上述校正,那么控制信号460的脉冲将分别具有相同的周期持续时间或相同的占空比。
119.图12示出计数器值113的时间上的变化,以及存在有计数器值113与比较值114的相应的一致性的时间点。
120.附图标记列表
121.1车辆前照灯
122.2偏转设备
123.3投影光学装置
124.4光转换器
125.5车辆前照灯的放射方向
126.10
‑
12光源
127.20偏转角
128.21、22方向
129.23转折区域
130.24转折点
131.25近似线性的区域
132.26理想的区域
133.40
‑
42光行列
134.100微控制器
135.110定时器单元
136.111计数器寄存器
137.112比较寄存器
138.113计数器值
139.114比较值
140.115时钟发生器
141.116系统时钟线路
142.120存储器
143.121时间表
144.122亮度表
145.130缓存
146.131配置数据
147.140外围控制设备
148.141二进制输出通道
149.142串行输出通道
150.143二进制输入通道
151.200调制设备
152.201反馈信号
153.202镜偏转信号
154.210
‑
212光通道
155.220
‑
222数模转换器,具有光源的r/2r网络
156.230
‑
232通道转换器
157.240数据总线
158.241
‑
243数据输入端
159.244
‑
245数据输出端
160.251模块时钟线路
161.260控制线路
162.270
‑
272第二总线
163.310
‑
317数字输入端
164.320
‑
327、330
‑
338、360电阻器
165.340、341运算放大器
166.345驱动线路
167.350晶体管
168.360电阻
169.440数据信号
170.450系统时钟信号
171.451模块时钟信号
172.460控制信号
173.470反馈信号
174.530启动计数器
175.540加载比较值
176.550加载亮度值
177.560输出数据信号
178.570使计数器增加
179.580将计数器值与比较值进行比较
180.590输出同步信号
181.600检查信号202中是否有变化
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。