1.本实用新型涉及机器人技术领域,具体为一种轻武器射击训练智能信息采集机器人。
背景技术:
2.现有技术的军事射击训练因场地、安全性等因素,组训人员实时掌握参训射手射击情况比较困难,大多在射击结束后人工进行报靶。目前现有的关于军事射击训练的信息化装置存在以下几方面的问题,1、目前针对军事射击训练设备,需要改变部队现有军事射击训练场地建设,现有智能报靶设备均是在场地上加装各类传感器,整个户外场地投入大,费用和维护成本高; 2、现有的视频监控设备,只能采集靶纸图像信息,无法准确、识别弹孔位置进而无法对射击成绩进行评定。
技术实现要素:
3.本实用新型的目的在于提供一种轻武器射击训练智能信息采集机器人,解决现有技术的不足,实现军事射击训练的智能化训练。
4.为解决上述技术问题,本实用新型一种轻武器射击训练智能信息采集机器人包括有机器人壳体,机器人壳体包括有壳体底座和壳体上盖,壳体底座上连接有钢化加固骨架组件、红外摄像头、散热风扇、接线端子台和视频采集卡,钢化加固骨架组件上连接有处理器、机器人壳体内连接有电池,电池连接在壳体底座与钢化加固骨架组件之间,壳体上盖上连接有外置天线,电池与接线端子台电性连接,接线端子台分别与红外摄像头和处理器电性连接,处理器分别与池电和红外摄像头数据连接,红外摄像头与视频采集卡连接,视频采集卡与处理器数据连接,散热风扇与电池电性连接,外置天线与电池电性连接。
5.进一步的,所述的壳体底座上设有电池导向支撑筋,电池导向支撑筋上连接有电池导向短垫块和电池导向垫块,电池左导向板和电池右导向板分别连接在电池导向支撑筋左右两侧,电池左导向板和电池右导向板采用螺钉固定,电池滑动连接在电池导向支撑筋、电池左导向板和电池右导向板之间,壳体底座上设有电池尾部固定板,电池尾部固定板阻挡电池滑动,壳体底座上连接有电池卡扣板,电池卡扣板连接在壳体底座末端,电池的锁舌扣在电池卡扣板。
6.进一步的,所述的壳体底座上连接有底座后加固板和底座前加固板,壳体底座底面内部设有底座后加固板槽和底座前加固板槽,底座后加固板和底座前加固板分别通过螺钉连接在底座后加固板槽和底座前加固板槽内,钢化加固骨架组件连接在底座后加固板和底座前加固板上。
7.进一步的,所述的壳体底座侧面设有风扇漏风口,风扇漏风口上连接有风扇固定板,散热风扇连接在风扇固定板上,风扇漏风口连接有进风口过滤棉压板,进风口过滤棉压板上铺垫有过滤棉,风扇漏风口上连接有进风口格栅和风扇漏风口盖板。
8.进一步的,所述的接线端子台、视频采集卡和处理器通过螺钉连接在钢化加固骨
架组件上,红外摄像头底部通过螺钉连接在壳体底座上。
9.进一步的,所述的壳体底座上设有底壳加长筋,底壳加长筋设在电池和红外摄像头之间,壳体上盖上设有上壳加长筋,底壳加长筋与上壳加长筋对应连接组成隔断,壳体底座底面下部连接有橡胶脚钉,橡胶脚钉设有多个,多个橡胶脚钉通过螺钉连接在壳体底座上。
10.进一步的,所述钢化加固骨架组件包括有工控机安装板、竖直支撑杆、后支撑梁、前支撑梁、把手固定板和固定夹,把手固定板连接在后支撑梁和前支撑梁之间,支撑梁和前支撑梁上分别连接有两个竖直支撑杆,每个竖直支撑杆上均连接有固定夹,工控机安装板连接在四个固定夹上,竖直支撑杆底端通过螺栓螺母分别连接在底座前加固板和底座后加固板上。
11.进一步的,所述的壳体上盖上连接有塑料把手,塑料把手通过螺钉连接在把手固定板上,壳体上盖上开设有摄像头预留口,摄像头预留口上部通过转轴转动连接有摄像头盖子,壳体上盖上连接有接插头安装板,接插头安装板通过螺钉连接在壳体上盖内,接插头安装板上方通过转轴转动连接有控制板盖板。
12.进一步的,所述的壳体上盖与摄像头盖子开合处连接有圆形磁铁,所述的壳体上盖与控制板盖板开合处连接有方形磁铁。
13.进一步的,所述的接插头安装板上集成处理器的控制面板和外置天线。
14.本实用新型的有益效果是:
15.1. 不改变部队现有的组训流程,不改变现有场地设施,轻武器射击训练智能信息采集机器人可随时随地部署,大大减少了事前准备、事后撤收工作量和人员投入量;
16.2. 自动化的采集、录入、统计、评定功能,改变了客户人工报靶、人工记录、人工汇总评定的现状,有效提升了训练考核组织效率;
17.3.多维数据分析,统计数据直观显示,多终端数据同步。
附图说明
18.图1为本实用新型整体结构主视图;
19.图2为本实用新型整体结构后视图;
20.图3为本实用新型整体结构俯视图;
21.图4为本实用新型整体结构仰视图;
22.图5为本实用新型图3中a
‑
a剖视图;
23.图6为本实用新型图3中b
‑
b剖视图;
24.图7为本实用新型图3中c
‑
c剖视图;
25.图8为本实用新型图3中d
‑
d剖视图;
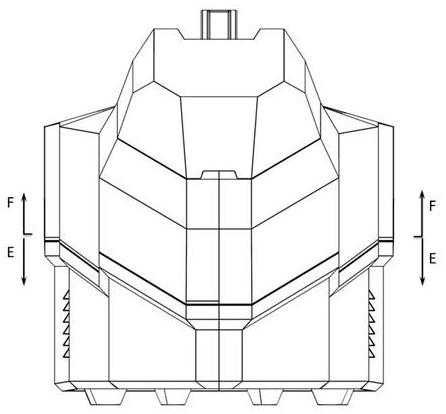
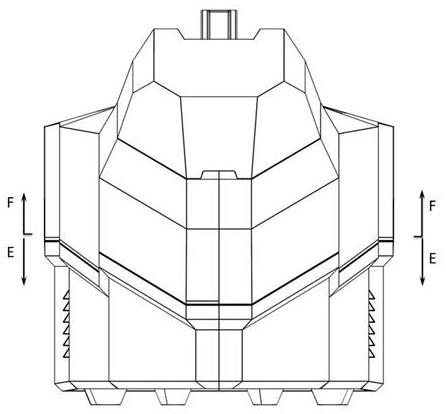
26.图9为本实用新型图1中e
‑
e剖视图;
27.图10为本实用新型图1中f
‑
f剖视图;
28.图11为本实用新型整体结构爆炸视图;
29.图12为本实用新型钢化加固骨架组件处的示意图
30.图13为本实用新型接插头安装板正视图;
31.图14为本实用新型接插头安装板后视图;
32.图15为本实用新型接插头安装板侧面视图。
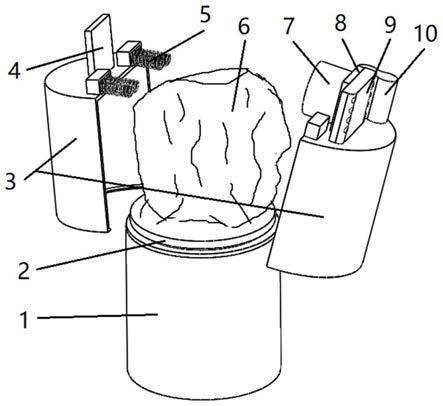
33.图中:1.红外摄像头;2.处理器;3.电池;4.塑料拉手;5.插接头安装板;6.控制板盖板;7.摄像头盖子;8.壳体底座;801橡胶脚钉;802.进风口格栅;803.风扇漏风口盖板;804.电池导向短垫板;805.电池导向垫块;806.电池卡扣板;807.底座后加固板;808.进风口过滤棉压板;809.电池左导向板;810.电池右导向板;811.底座前加固板;812.风扇固定板;813.风扇漏风口;814.电池导向支撑筋;815.电池尾部固定板;816.底壳加长筋;9.钢化加固骨架组件;901.工控机安装板;902.竖直支撑杆;903.后支撑梁;904.前支撑梁;905.把手固定板;906.固定夹;10.壳体上盖;1001.上壳加长筋;11.散热风扇;12.接线端子台;13.视频采集卡;14.外置天线;15.圆形磁铁;16.方形磁铁。
具体实施方式
34.如图1
‑
图15所示,本实用新型一种轻武器射击训练智能信息采集机器人包括有机器人壳体,机器人壳体包括有壳体底座8和壳体上盖10,壳体底座8上连接有钢化加固骨架组件9、红外摄像头1、散热风扇11、接线端子台12和视频采集卡13,钢化加固骨架组件9上连接有处理器2、机器人壳体内连接有电池3,电池3连接在壳体底座8与钢化加固骨架组件9之间,壳体上盖10上连接有外置天线14,电池3与接线端子台12电性连接,接线端子台12分别与红外摄像头1和处理器2电性连接,处理器2分别与电池3和红外摄像头1数据连接,红外摄像头1与视频采集卡13连接,视频采集卡13与处理器2数据连接,散热风扇11与电池3电性连接,外置天线14与电池3电性连接。
35.进一步的,所述的壳体底座8上设有电池导向支撑筋814,电池导向支撑筋814上连接有电池导向短垫块804和电池导向垫块805,电池左导向板809和电池右导向板810分别连接在电池导向支撑筋814左右两侧,电池左导向板809和电池右导向板810采用螺钉固定,电池3滑动连接在电池导向支撑筋814、电池左导向板809和电池右导向板810之间,壳体底座8上设有电池尾部固定板815,电池尾部固定板815阻挡电池3滑动,壳体底座8上连接有电池卡扣板806,电池卡扣板806连接在壳体底座8末端,电池3的锁舌扣在电池卡扣板806。
36.进一步的,所述的壳体底座8上连接有底座后加固板807和底座前加固板811,壳体底座8底面内部设有底座后加固板槽和底座前加固板槽,底座后加固板807和底座前加固板811分别通过螺钉连接在底座后加固板槽和底座前加固板槽内,钢化加固骨架组件9连接在底座后加固板807和底座前加固板811上。
37.进一步的,所述的壳体底座8侧面设有风扇漏风口813,风扇漏风口813上连接有风扇固定板812,散热风扇11连接在风扇固定板812上,风扇漏风口813连接有进风口过滤棉压板808,进风口过滤棉压板808上铺垫有过滤棉,风扇漏风口813上连接有进风口格栅802和风扇漏风口盖板803。
38.进一步的,所述的接线端子台12、视频采集卡13和处理器2通过螺钉连接在钢化加固骨架组件9上,红外摄像头1底部通过螺钉连接在壳体底座8上。
39.进一步的,所述的壳体底座8上设有底壳加长筋816,底壳加长筋816设在电池3和红外摄像头1之间,壳体上盖10上设有上壳加长筋1001,底壳加长筋816与上壳加长筋1001对应连接组成隔断,壳体底座8底面下部连接有橡胶脚钉801,橡胶脚钉801设有多个,多个橡胶脚钉801通过螺钉连接在壳体底座8上。
40.进一步的,所述钢化加固骨架组件9包括有工控机安装板901、竖直支撑杆902、后支撑梁903、前支撑梁904、把手固定板905和固定夹906,把手固定板905连接在后支撑梁903和前支撑梁904之间,支撑梁903和前支撑梁904上分别连接有两个竖直支撑杆902,每个竖直支撑杆902上均连接有固定夹906,工控机安装板901连接在四个固定夹906上,竖直支撑杆902底端通过螺栓螺母分别连接在底座前加固板811和底座后加固板807上。
41.进一步的,所述的壳体上盖10上连接有塑料把手4,塑料把手4通过螺钉连接在把手固定板905上,壳体上盖10上开设有摄像头预留口,摄像头预留口上部通过转轴转动连接有摄像头盖子7,壳体上盖10上连接有接插头安装板5,接插头安装板5通过螺钉连接在壳体上盖10内,接插头安装板5上方通过转轴转动连接有控制板盖板6。
42.进一步的,所述的壳体上盖10与摄像头盖子7开合处连接有圆形磁铁15,所述的壳体上盖10与控制板盖板6开合处连接有方形磁铁16。
43.进一步的,所述的接插头安装板5上集成处理器2的控制面板和外置天线14。
44.红外摄像头21实时采集靶标图片传输至处理器2,处理器2通过内置人工智能算法智能识别、评定当前靶位射击成绩,实现射击训练智能信息采集和监控检测。
45.当电池3抽拉滑动时,电池导向短垫块804和电池导向垫块805安装在电池导向支撑筋814上,负责保护底壳,防止损伤底壳,电池左导向板809和电池右导向板810安装在底壳电池导向支撑筋814上用螺钉固定,安装在电池左右两侧电池,用来约束电池在抽拉过程中的运动轨迹从而使得电池精准的卡进电池尾部固定板816;底壳的内部安装约束电池的电池尾部固定板816,当电池推进去时,起到缓冲和阻挡电池过于凹陷进去损坏内部结构;电池卡扣板806安装在底壳末端,在电池3插进壳体时,电池3上的锁舌扣住电池卡扣板806,使得电池3不掉落出来;底座后加固板807和底座前加固板811加固底面硬度,为钢化加固骨架组件9提供着力点,保护壳体;底壳加长筋816与上壳加长筋1001共同组成隔断为后方仪器防尘;将红外摄像头1与后方仪器分离;操作面板挡板转轴槽上通过控制面板挡板转轴杆安装,固定控制板盖板6,控制板盖板6开合处加入方形磁铁16,约束控制板盖板6的开合;接插头安装板5用螺钉固定在上壳10上,上面集成控制面板和外置天线14;钢化加固骨架组件9防止螺钉损坏底壳使得壳体受力面积增大减少壳体磨损,分散把手对壳体受力,从而对壳体起到保护作用。
46.所述电池卡扣板806通过螺丝固定于底座8,通过电池上的锁扣实现可拆卸,使得拆卸方式简单,便于运维人员拆卸、更换电池3。
47.处理器2由cpu、内存8gb、集成显卡、硬盘和usb接口组成;cpui7
‑
8265u以上,内存8gb以上,硬盘120gb以上,usb3.1以上。
48.红外摄像头1参数要求为带2轴齿轮云台,可通过程序控制转向;物理像素300万及以上,无畸变;温度范围
‑
20~60摄氏度;可自动调焦(3
‑
12mm),最少支持20倍光学变倍,可在2.5米位置完整拍摄0.5米*0.5米区域;高清视频接口sdi,ip 66级防水;暗光下图像噪点少,信噪比大于 55db;在室外环境下使用,在阴天、晴天等情况下可自动调整曝光度,支持红外夜视功能。
49.供电电源3技术参数电源容量600wh,包含5组dc12v、3a输出接口,1组dc14.6v、10a输入接口,1个usb数据通讯接口,1个电源启动接口,1个电量显示屏接口,外配1个电量显示屏,支持rs232串口通讯。
50.视频采集卡:dv 5v供电,功耗2.25w;输出采集分辨率;支持640x360到1920x1080多种;这速率:25/29.97/30/50/59.94/60fps;支持标准uvc(usb视频类)和uac(usb音频类)采集。
51.上述配置技术参数要求不仅限于上述型号,相关电气化设备型号备选范围较广,无法一一列举,申请人仅给出部分适用型号。
52.使用时根据射击场地靶位数量匹配机器人数量,每个靶位匹配一台机器人,将机器人正对胸环靶位放置,同时进行编号,不同编号对应不同靶位,参训射手对应不同靶位在射击地线处据枪射击,红外摄像头2进行靶纸图像采集,并将采集到的图像信息传输至处理器1,处理器1根据人工智能算法智能识别靶纸信息,并对靶纸上的弹孔进行识别、定位,通过无线加密局域网络将图像资料和弹孔信息远程上传至系统服务器中,服务器根据靶位和机器人的编号对应关系确定人员信息,与射击成绩对应,进行系统化保存。本案机器人适用于在室内、外射击场地开展大型军事射击训练、考核,机器人体积小、重量适中,便于移动至指定场地区域,不改变部队现有的组训流程,不改变现有场地设施,大大减少了事前准备、事后撤收工作量和人员投入量;自动化的采集、录入、统计、评定功能,无需人工报靶,有效提升了训练考核组织效率。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。