1.本发明涉及伞弹系统模拟试验领域,用于模拟伞弹系统弹道过程,具体涉及一种弹用机械式伞盖弹射装置。
背景技术:
2.目前国内外对末敏弹的改进与优化进行了大量的研究,但是末敏弹含有火工品,传统的伞盖开伞方式均采用火工品提供能量源来控制开伞,对研究和使用人员具有一定的危险性。对于模拟其弹道过程、探测识别并进行主动防御、优化其作战过程等相关试验研究,则需要一种不含有火工品的开伞方案来进行模拟试验。
3.中国专利cn201811561818.5中公开了一种《降落伞弹射装置及无人机》,其利用撞针组件进行触发,采用储气瓶中的高压气体通过导气道将降落伞从伞筒中吹出,从而实现开伞。但是储气瓶会占用大量空间,不适合挂载于弹体中,并且末敏弹的减速伞有导旋结构,开伞时刻弹体落速较高,采用高压气体来控制弹射很容易发生搅伞。
技术实现要素:
4.本发明的目的在于提供一种弹用机械式伞盖弹射装置,采用不含有火工品的机械式开伞方式,用于配合伞弹系统进行模拟实验。
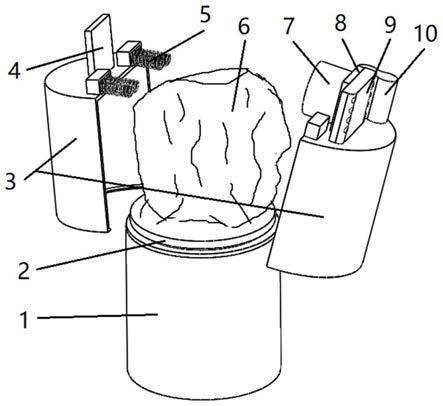
5.实现本发明目的的技术解决方案为:一种弹用机械式伞盖弹射装置,包括弹后盖板、伞盖、铁吸盘、减速伞、电磁铁、电磁铁安装架、延时触发器、电源、触发导线和若干弹簧。
6.弹后盖板为圆柱状,固定在待投弹体的尾部,所述弹后盖板尾端的圆周外壁上开有一圈凹槽,用于卡住伞盖,并限制其轴向移动;
7.伞盖由两个分离式的半圆柱壳体构成,两个半圆柱壳体吸合后,形成腔体,减速伞叠放于腔体内,所述伞盖的头部内壁设有一圈凸起,用于配合卡入弹后盖板的尾部凹槽,其尾端面设有若干个孔座,每个孔座内设有一个弹簧,一个半圆柱壳体的尾端面上固连有铁吸盘,另一个半圆柱壳体的尾端面上固连有电磁铁安装架,电磁铁固定在电磁铁安装架上,电磁铁通电后与铁吸盘吸合以限制伞盖的径向移动。
8.所述延时触发器与电磁铁连接,用于控制电磁铁的通断,进而控制两个分离式半圆柱壳体的吸合与弹开。
9.所述电源分别与延时触发器和电磁铁连接,用于给延时触发器和电磁铁供电。
10.所述触发导线与延时触发器连接,在投弹的瞬间触发导线断开,用于给延时触发器提供触发信号。
11.所述电磁铁有吸合与断开两种状态,分别由其通电与断电状态控制;当电磁铁吸合时,弹簧处于压缩状态,当电磁铁断开时弹簧释放弹性势能并将伞盖的两个分离式的半圆柱壳体弹开,进而释放减速伞。
12.本发明与现有技术相比,其显著优点在于:
13.(1)本发明采用分离式伞盖、弹簧、电磁铁、延时触发器和卡槽结构实现伞盖的弹
射,以实现对减速伞的保护与控制释放。
14.(2)本发明采用延时触发和机械结构来控制开伞过程,可以很好地模拟伞弹系统的弹道过程。
15.(3)开伞系统不含有火工品,可以保证研究试验人员的安全性,使用本发明进行伞弹系统的模拟试验,有利于对伞弹系统进一步研究和改进以及提高对伞弹系统的防御能力。
附图说明
16.图1为本发明中伞盖的吸合状态结构图。
17.图2为本发明中伞盖的打开状态结构图。
18.图3为本发明中伞盖的结构图。
19.图4为本发明中伞盖的轴向限制结构图。
20.图5为本发明中延时触发器的控制流程图。
21.图6为本发明的弹道曲线图,包括垂直速度曲线图(a)和高度曲线图(b)。
22.图中:1
‑
弹体,2
‑
弹后盖板,3
‑
伞盖,4
‑
铁吸盘,5
‑
弹簧,6
‑
减速伞,7
‑
电磁铁,8
‑
电磁铁安装架,9
‑
延时触发器,10
‑
电源,11
‑
触发导线。
23.弹道曲线图中:v
‑
速度,h
‑
高度,t
‑
时间,i
‑
自由落体加速阶段,
ⅱ‑
开伞减速阶段,
ⅲ‑
匀速下落阶段,v1‑
下落最大垂直速度,v2‑
匀速下落垂直速度,h1‑
投放高度,h2‑
开伞时刻高度,h3‑
到达匀速时刻高度,t1‑
开伞时刻,t2‑
到达匀速时刻,t3‑
落地时刻。
具体实施方式
24.下面将结合本发明的附图和工作原理,对本发明一种机械式伞盖弹射系统做进一步详细说明。
25.结合图1和图2,本发明为一种弹用机械式伞盖弹射装置,包括弹后盖板2、伞盖3、铁吸盘4、减速伞6、电磁铁7、电磁铁安装架8、延时触发器9、电源10、触发导线11和若干弹簧5。
26.所述待投弹体1可以使用模拟弹体,也可以使用真实弹体,在使用模拟弹体时其尺寸、质量、转动惯量和攻角与真实弹体一致。
27.结合图3和图4,弹后盖板2为圆柱状,固定在待投弹体1的尾部,二者可制为一体式,所述弹后盖板2尾端的圆周外壁上开有一圈凹槽,用于卡住伞盖3,并限制其轴向移动。
28.伞盖3由两个分离式的半圆柱壳体构成,两个半圆柱壳体吸合后,形成腔体,减速伞6叠放于腔体内,所述伞盖3的头部内壁设有一圈凸起,用于配合卡入弹后盖板2的尾部凹槽,其尾端面设有若干个孔座,每个孔座内设有一个弹簧5,一个半圆柱壳体的尾端面上固连有铁吸盘4,另一个半圆柱壳体的尾端面上固连有电磁铁安装架8,电磁铁7固定在电磁铁安装架8上,所述铁吸盘4及电磁铁安装架8二者间距正好可以放置电磁铁7。电磁铁7通电后与铁吸盘4吸合以限制伞盖3的径向移动。
29.所述延时触发器9与电磁铁7连接,用于控制电磁铁7的通断,进而控制两个分离式半圆柱壳体的吸合与弹开。
30.所述电源10分别与延时触发器9和电磁铁7连接,用于给延时触发器9和电磁铁7供
电。电源10可以使用一组电池,也可以使用多组电池。
31.所述触发导线11与延时触发器9连接,在投弹的瞬间触发导线11断开,用于给延时触发器9提供触发信号;
32.所述电磁铁7为圆柱形,有吸合与断开两种状态,分别由其通电与断电状态控制;当电磁铁7吸合时,弹簧5处于压缩状态,当电磁铁7断开时弹簧5释放弹性势能并将伞盖3的两个分离式的半圆柱壳体弹开,进而释放减速伞6。
33.结合图5,所述延时触发器9包括触发信号单元、倒计时电路单元、继电器单元,所述触发信号单元利用触发导线11控制,在投弹前触发导线11与延时触发器9连接并导通,触发信号单元短路,伞盖3处于吸合状态;在投弹的瞬间触发导线11断开,触发信号单元断路并向倒计时电路单元提供触发信号,此时倒计时电路单元开始倒计时;在倒计时完成后,进一步由继电器单元控制电磁铁7断开,实现开伞。
34.结合图6,带有弹用机械式伞盖弹射装置的待投弹体1的投放下落过程有三个阶段,包括自由落体加速阶段i、开伞减速阶段ⅱ、匀速下落阶段ⅲ,三个阶段组成待投弹体1的下落弹道。
35.待投弹体1在高度h1被释放,投放后,待投弹体1做自由落体运动,在投放的瞬间延时触发器9开始倒计时,经过倒计时设定时间t1后,待投弹体1的垂直速度达到v1,高度下降到h2,此时延时触发器9倒计时结束,伞盖3被打开,减速伞6被释放,待投弹体1进入减速阶段ⅱ开始减速,t2时刻时,待投弹体1减速到匀速下降时的垂直速度v2,高度下降到h3,之后待投弹体1做匀速下降运动,t3时刻时,待投弹体1落到地面。
36.在待投弹体1的下落过程中,其垂直速度与时间满足如下关系式:
[0037][0038]
其中,∑m
x
(x=1,2)为带有弹用机械式伞盖弹射装置的待投弹体1质量的总和,∑m1为自由落体加速阶段i时待投弹体1质量的总和(包括伞盖弹射装置),∑m2为开伞减速阶段ⅱ和匀速下落阶段ⅲ时待投弹体1质量的总和(不包括伞盖弹射装置),g为当地重力加速度,c
x
(x=1,2)为空气阻力系数,c1为自由落体加速阶段i时的空气阻力系数,c2为开伞减速阶段ⅱ和匀速下落阶段ⅲ时的空气阻力系数,ρ为空气密度,a为伞弹的迎风面积即圆柱体横截面积,v表示伞弹下落时的垂直速度。
[0039]
下面结合图6中伞弹的垂直速度曲线图(a)和高度曲线图(b)来介绍本发明的弹道曲线图:
[0040]
待投弹体1在自由落体加速阶段i做自由落体运动,此时伞盖3处于吸合状态,减速伞6未打开,空气阻力系数较小,空气阻力较小,速度曲线近似为直线,斜率近似为当地重力加速度g,高度曲线近似为二次曲线,经过时间t1(倒计时单元设定时间)后,垂直速度到达最大速度v1,待投弹体1距地面高度由h1下降到h2。
[0041]
待投弹体1在开伞减速阶段ⅱ做急剧减速运动,在t1时刻伞盖3在一瞬间打开,减速伞6在一瞬间被释放并展开,此阶段的空气阻力系数c2较大,空气阻力较大,待投弹体1的垂直速度在很短的时间内由v1下降到v2,高度由h1下降到h2,本阶段持续时间为t2‑
t1。
[0042]
待投弹体1在匀速下落阶段ⅲ做匀速下落运动,此时待投弹体1的空气阻力等于其重力,垂直速度保持为v2,t3时刻时待投弹体1到达地面。
[0043]
应当注意的是:图6仅表示出其下落过程中的近似特征,由于其真实弹道的复杂性和参数的不确定性,本弹道曲线图旨在用于表述和分析待投弹体1在下落过程中的各个阶段和其运动学特征。
[0044]
关于本发明重要零件参数的选择,包括电磁铁7吸力、弹簧5弹力、伞盖3尺寸须满足一定要求才能保证伞盖3的吸合与弹射能力,在伞盖3吸合状态时,伞盖3头部难免会产生一定程度的翘边,翘边区域在弹的下落过程中会产生空气阻力,从而影响伞盖3的吸合能力。
[0045]
为实现本发明的正常工作,还需满足以下公式:
[0046]
f1=f2 f
k
ꢀꢀ
(式
②
)
[0047]
f
k
=n
·
k
·
x
ꢀꢀ
(式
③
)
[0048]
f3·
r f
k
·
l f2·
r=f1·
r
ꢀꢀ
(式
④
)
[0049][0050]
f2≥0
ꢀꢀ
(式
⑥
)
[0051]
式
②
为伞盖3径向受力平衡方程,式
③
为弹簧5总弹力方程,式
④
为伞盖3力矩平衡方程,式
⑤
为单个伞盖3翘边区域空气阻力方程。
[0052]
其中:f1为电磁铁7吸力,f2为电磁铁7与铁吸盘4之间压力即两个半圆柱壳体之间压力,f
k
为弹簧5总弹力,n为弹簧5个数,k为弹簧5弹性系数,x为弹簧5压缩量,f3为单个半圆柱壳体翘边区域空气阻力,r为伞盖3截面半径,l为弹簧5轴线与电磁铁7轴线间位移,r为电磁铁7半径,ρ为空气密度,c
p
为空气阻力系数,a
p
为单个半圆柱壳体翘边区域迎风面积,v1为带有弹用机械式伞盖弹射装置的待投弹体1最大垂直速度。
[0053]
本发明主要用于模拟伞弹系统的弹道,采用分离式伞盖3、弹簧5、电磁铁7、延时触发器9和卡槽结构实现伞盖3的弹射,以实现对减速伞6的保护与控制释放。本发明采用延时触发和机械结构来控制开伞过程,可以很好地模拟伞弹系统的弹道过程,本发明开伞方案中不含有火工品,可以保证研究试验人员的安全性。本发明涉及伞弹系统模拟试验领域,使用本发明进行伞弹系统的模拟试验,有利于对伞弹系统进一步研究和改进以及提高对伞弹系统的防御能力。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。