1.本实用新型涉及爬壁机器人技术领域,具体涉及用于桥隧检测的爬壁机器人。
背景技术:
2.随着我国经济建设迅猛发展,我国桥隧(桥梁和隧道)总量已位居世界前列。然而,由于结构设计缺陷,施工质量不高,检测维护不力,超负荷运营等原因引起的桥隧事故时有发生,严重威胁着人民的生命财产安全。因此,加强桥隧检测,及时进行维修显得尤为重要。桥隧缺陷中,桥隧裂缝是主导因素,是内部损伤达到的危险程度的集中表现,故其信息含量很大,对于预示和征兆桥隧险情具有关键性意义。不仅如此,桥隧出现裂缝,会导致桥隧内部的钢筋水泥受到外界空气和雨水不断侵蚀,引发更严重的危害。
3.然而,目前国内外桥隧裂缝的检测方法基本上是使用大型机械设备(如升降式检测车)搭载检修人员进行肉眼观察或人工携带小型设备进行观察记录,存在检测费用高,设备笨重,效率低等问题,且无法保证准确性和稳定性。为此,公开号为cn104972459a的中国专利公开了《一种吸附攀爬式桥梁裂缝检测机器人》,其包括膝关节模块、相机模块和两踝关节模块,其中,膝关节模块包括动力舵机a和两连接件;每个踝关节模块分别固定安装在膝关节模块的一连接件上,并且每个踝关节模块均包括踝关节支架和安装在踝关节支架上的驱动单元和吸盘模块;吸盘模块包括吸盘、吸盘转轴和真空泵单元,真空泵单元固定安装在第一支架上;相机模块为一个以上,相机模块可转动安装在踝关节支架上,其用于拍摄桥底面的缺陷。该现有方案中的裂缝检测机器人可以实现行走、越障和转向的功能。
4.上述现有方案中的裂缝检测机器人也是一种爬壁机器人,具体包括吸附模块、膝关节模块、踝关节模块、图像采集模块以及用于控制各个模块工作的控制模块。其通过吸附模块吸附于桥隧表面,然后通过膝关节模块和踝关节模块以翻滚和旋转的方式带动机器人移动,并在移动过程中通过图像采集模块采集桥隧表面图像。申请人发现,桥隧以钢材作为主材,而钢材存在易锈蚀的问题,因此需要对钢材的缺陷和应力等状态参数进行检测(即磁信号检测)。现有技术中一般采用磁传感模块来完成钢材磁信号的无损检测,而磁传感模块工作时需要一个稳定的检测环境和检测距离(与桥隧表面之间的距离)。然而,现有爬壁机器人的膝关节模块和踝关节模块移动时的动作幅度和抖动很大,使得爬壁机器人的移动稳定性不好,那么将磁传感模块安装在现有的爬壁机器人上时,磁传感模块难以获得稳定的检测环境和检测距离,导致爬壁机器人的磁信号检测效果不好。因此,如何设计一种能够为磁信号检测提供稳定的检测环境和检测距离的爬壁机器人是急需解决的技术问题。
技术实现要素:
5.针对上述现有技术的不足,本实用新型所要解决的技术问题是:如何提供一种移动稳定性好的用于桥隧检测的爬壁机器人,以能够为磁信号检测提供稳定的检测环境和检测距离,从而能够辅助提升爬壁机器人的磁信号检测效果。
6.为了解决上述技术问题,本实用新型采用了如下的技术方案:
7.用于桥隧检测的爬壁机器人,包括机身,设置于机身内的控制模块,设置于机身底部且用于将机身吸附在桥隧表面的吸附模块,与所述控制模块数据传输连接的图像采集模块,与所述控制模块电连接的动力模块,以及与所述控制模块数据传输连接的磁传感模块;所述动力模块能够以履带步进的方式带动机身在桥隧表面移动;所述磁传感模块包括设置于机身顶部前端的安装支架,以及安装于所述安装支架上且检测端正对桥隧表面的磁传感器;所述图像采集模块安装在所述安装支架上且其图像采集端与所述磁传感器检测端的朝向一致。
8.优选的,所述安装支架包括固设于机身前端的安装柱,以及设置于所述安装柱上且用于安装所述磁传感器的安装座;所述图像采集模块安装在所述安装座上。
9.优选的,所述安装座与所述安装柱之间设置有高度调节组件,所述安装座通过高度调节组件与所述安装柱连接,并能够通过所述高度调节组件来调节所述安装座在所述安装柱上的高度位置。
10.优选的,所述安装柱上设有若干个沿垂直于机身底面的方向间隔布置的横向固定孔;所述高度调节组件包括插销,以及与所述安装座固定连接的固定环;所述固定环套设于安装柱上,且具有与所述横向固定孔相对应的安装孔,使得能够通过插销与安装孔和横向固定孔插接配合的方式来调节所述安装座在所述安装柱上的高度位置。
11.优选的,所述动力模块包括与所述控制模块电连接的动力舵机,以及与所述动力舵机传动连接的履带结构;所述履带结构的底面能够在机身吸附于待检测桥隧的表面时与待检测桥隧的表面接触。
12.优选的,机身的底部设置有间隔布置的两个吸附模块。
13.优选的,所述吸附模块包括与所述控制模块电连接的离心风机,以及与所述控制模块电连接且用于带动所述离心风机转动的电机;所述离心风机的进风口设置于机身的底部。
14.优选的,机身的底部上对应于所述离心风机进风口的位置设置有围绕所述离心风机进风口一周布置的密封围裙结构;所述密封围裙结构能够在机身底部形成一个密封腔体。
15.优选的,所述爬壁机器人还包括与所述控制模块数据传输连接的气压检测模块;所述气压检测模块的检测端设置于所述密封腔体内。
16.优选的,所述爬壁机器人还包括设置于机身内且与所述控制模块供电传输连接的电源模块,所述电源模块能够为所述吸附模块、所述图像采集模块、所述动力模块和所述磁传感模块提供电能。
17.本实用新型中用于桥隧检测的爬壁机器人与现有技术相比,具有如下有益效果:
18.1、本方案中,吸附模块用于将机身吸附在待检测桥隧的表面上,动力模块能够通过履带步进的方式带动机身移动,而履带步进的移动方式具有较小的动作幅度和抖动,使得爬壁机器人的移动稳定性更高,这能够给磁传感器提供稳定的磁信号检测环境,从而能够辅助提升爬壁机器人的磁信号检测效果。其次,磁传感器通过安装支架固定在机身上,而安装支架使得磁传感器能够与桥隧表面保持一个稳定的检测距离,这同样能够提升爬壁机器人的磁信号检测效果。
19.2、本方案中,磁传感器和图像采集模块均安装在安装支架上,且图像采集模块的
图像采集端与磁传感器检测端的朝向一致,使得爬壁机器人能够在移动过程中采集同一桥隧表面位置的磁信号和表面图像数据,并能够将磁信号和表面图像数据对应结合,从而能够兼顾钢材状态参数和桥隧裂缝的检测效果。
20.3、本方案中,在机身的底部设置了围绕离心风机进风口一周布置的密封围裙结构,使得密封围裙结构能够在机身底部形成一个密封腔体,那么离心风机只需要抽离密封腔体内的气体便能够将机身吸附在桥隧表面上,这能够辅助提升吸附模块的吸附稳定性。
附图说明
21.为了使实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型作进一步的详细描述,其中:
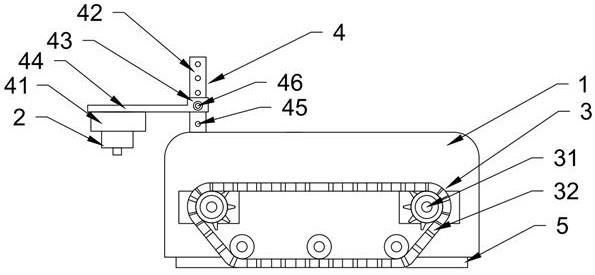
22.图1为实施例中爬壁机器人侧视角度下的结构示意图;
23.图2为实施例中爬壁机器人的逻辑框图;
24.图3为实施例中爬壁机器人正视角度下的结构示意图;
25.图4为实施例中爬壁机器人底部的结构示意图。
26.说明书附图中的附图标记包括:机身1、图像采集模块2、动力模块3、动力舵机31、履带结构32、磁传感模块4、磁传感器41、安装柱42、固定环43、安装座44、横向固定孔45、插销46、密封围裙结构5、离心风机6。
具体实施方式
27.下面通过具体实施方式进一步详细的说明:
28.实施例:
29.本实施例中公开了一种用于桥隧检测的爬壁机器人。
30.如图1和图2所示,用于桥隧检测的爬壁机器人,包括机身1,设置于机身1内的控制模块,设置于机身1底部且用于将机身1吸附在桥隧表面的吸附模块,与控制模块数据传输连接的图像采集模块2,与控制模块电连接的动力模块3,以及与控制模块数据传输连接的磁传感模块4;动力模块3能够以履带步进的方式带动机身1在桥隧表面移动;磁传感模块4包括设置于机身1顶部前端的安装支架,以及安装于安装支架上且检测端正对桥隧表面的磁传感器41。结合图3所示,图像采集模块2安装在安装支架上且其图像采集端与磁传感器41检测端的朝向一致。本实施例中,控制模块为stm32f103芯片,其主要控制各个模块的工作;图像采集模块2为带高清摄像头的安卓设备组成,其能够将采集到的图像数据通过无线或移动网络发送到后台;磁传感器41为现有技术中成熟使用的磁传感器41。
31.本方案中,吸附模块用于将机身1吸附在待检测桥隧的表面上,动力模块3能够通过履带步进的方式带动机身1移动,而履带步进的移动方式具有较小的动作幅度和抖动,使得爬壁机器人的移动稳定性更高,这能够给磁传感器41提供稳定的磁信号检测环境,从而能够辅助提升爬壁机器人的磁信号检测效果。其次,磁传感器41通过安装支架固定在机身1上,而安装支架使得磁传感器41能够与桥隧表面保持一个稳定的检测距离,这同样能够提升爬壁机器人的磁信号检测效果。进一步的,磁传感器41和图像采集模块2均安装在安装支架上,且图像采集模块2的图像采集端与磁传感器41检测端的朝向一致,使得爬壁机器人能够在移动过程中采集同一桥隧表面位置的磁信号和表面图像数据,并能够很好的将磁信号
和表面图像数据对应结合,从而能够兼顾钢材状态参数和桥隧裂缝的检测效果。
32.具体实施过程中,安装支架包括固设于机身1前端的安装柱42,以及设置于安装柱42上且用于安装磁传感器41的安装座44;图像采集模块2安装在安装座44上。安装座44与安装柱42之间设置有高度调节组件,安装座44通过高度调节组件与安装柱42连接,并能够通过高度调节组件来调节安装座44在安装柱42上的高度位置。
33.本方案中,通过高度调节组件能够调节安装座44在安装柱42上的高度位置,从而能够调节磁传感器41与桥隧表面之间的检测距离,从而能够更好的适应各种应用场景下的桥隧磁信号检测。
34.具体实施过程中,安装柱42上设有若干个沿垂直于机身1底面的方向间隔布置的横向固定孔45;高度调节组件包括插销46,以及与安装座44固定连接的固定环43;固定环43套设于安装柱42上,且具有与横向固定孔45相对应的安装孔,使得能够通过插销46与安装孔和横向固定孔45插接配合的方式来调节安装座44在安装柱42上的高度位置。
35.本方案中,能够通过插销46将安装座44固定在不同高度的横向固定孔45上,能够实现安装座44高度位置的调节,从而能够方便的调节磁传感器41与桥隧表面之间的检测距离。
36.具体实施过程中,动力模块3包括与控制模块电连接的动力舵机31,以及与动力舵机31传动连接的履带结构32;履带结构32的底面能够在机身1吸附于待检测桥隧的表面时与待检测桥隧的表面接触。本实施例中,动力舵机31采用360
°
金属舵机,其具有强大的扭矩力,能够为爬壁机器人的行进提供足够的动力保障;履带结构32采用现有技术中机器人领域成熟使用的履带。
37.本方案中,动力舵机31输出扭矩带动履带结构32运动,履带结构32的底面与桥隧表面接触,使得机身1能够在履带的带动下移动,履带步进的移动方式具有较小的动作幅度和抖动,使得爬壁机器人的移动稳定性高,这能够给磁传感器41提供稳定的检测环境。
38.具体实施过程中,机身1的底部设置有间隔布置的两个吸附模块。吸附模块包括与控制模块电连接的离心风机6,以及与控制模块电连接且用于带动离心风机6转动的电机;离心风机6的进风口设置于机身1的底部。
39.本方案中,通过电机驱动离心风机6转动,进而由离心风机6通过其进气口快速抽离机身1底部的气体,使得机身1底部与大气压形成压差,进而能够将机身1吸附在桥隧表面,从而能够很好的实现爬行机器人的爬行功能。
40.具体实施过程中,结合图4所示,机身1的底部上对应于离心风机6进风口的位置设置有围绕离心风机6进风口一周布置的密封围裙结构5;密封围裙结构5能够在机身1底部形成一个密封腔体。本实施例中,密封围裙结构5采用现有的密封条制成。
41.实际工作过程中,通过离心风机6很难完全抽离机身1底部的气体,使得机身1难以稳定的吸附在桥隧表面,导致吸附模块的吸附稳定性不好。所以,本方案在机身1的底部设置了围绕离心风机6进风口一周布置的密封围裙结构5,使得密封围裙结构5能够在机身1底部形成一个密封腔体,那么离心风机6只需要抽离密封腔体内的气体便能够将机身1吸附在桥隧表面上,这能够辅助提升吸附模块的吸附稳定性。
42.具体实施过程中,爬壁机器人还包括与控制模块数据传输连接的气压检测模块;气压检测模块的检测端设置于密封腔体内。本实施例中,气压检测模块为现有的气压计。
43.实际工作过程中,吸附模块产生的吸附力并不是越大越好,因为吸附力过大会导致动力模块3难以便捷的带动机身1移动,而吸附力过小又会导致机身1难以稳定的吸附在桥隧表面。所以,本方案设置了气压检测模块,用于获取密封腔体内的气压数据,使得能够通过气压数据调节吸附模块的吸附力,这有利于兼顾动力模块3的移动便捷性和吸附模块的吸附稳定性。
44.具体实施过程中,爬壁机器人还包括设置于机身1内且与控制模块供电传输连接的电源模块,电源模块能够为吸附模块、图像采集模块2、动力模块3和磁传感模块4提供电能。本实施例中,电源模块为航模3s 6500mah锂电池和三个直流稳压模块组成,其能够提供5v和8v工作电压。
45.以上所述的仅是本实用新型的实施例,方案中公知的具体结构及特性等常识在此未作过多描述,所属领域普通技术人员知晓申请日或者优先权日之前实用新型所属技术领域所有的普通技术知识,能够获知该领域中所有的现有技术,并且具有应用该日期之前常规实验手段的能力,所属领域普通技术人员可以在本技术给出的启示下,结合自身能力完善并实施本方案,一些典型的公知结构或者公知方法不应当成为所属领域普通技术人员实施本技术的障碍。应当指出,对于本领域的技术人员来说,在不脱离本实用新型结构的前提下,还可以作出若干变形和改进,这些也应该视为本实用新型的保护范围,这些都不会影响本实用新型实施的效果和专利的实用性。本技术要求的保护范围应当以其权利要求的内容为准,说明书中的具体实施方式等记载可以用于解释权利要求的内容。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。