技术特征:
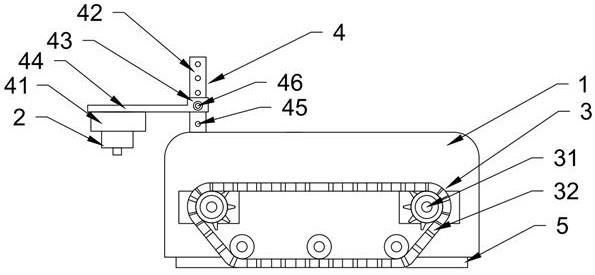
1.用于桥隧检测的爬壁机器人,包括机身和设置于机身内的控制模块,其特征在于:还包括设置于机身底部且用于将机身吸附在桥隧表面的吸附模块,与所述控制模块数据传输连接的图像采集模块,与所述控制模块电连接的动力模块,以及与所述控制模块数据传输连接的磁传感模块;所述动力模块能够以履带步进的方式带动机身在桥隧表面移动;所述磁传感模块包括设置于机身顶部前端的安装支架,以及安装于所述安装支架上且检测端正对桥隧表面的磁传感器;所述图像采集模块安装在所述安装支架上且其图像采集端与所述磁传感器检测端的朝向一致;所述动力模块包括与所述控制模块电连接的动力舵机,以及与所述动力舵机传动连接的履带结构;所述履带结构的底面能够在机身吸附于待检测桥隧的表面时与待检测桥隧的表面接触。2.如权利要求1所述的用于桥隧检测的爬壁机器人,其特征在于:所述安装支架包括固设于机身前端的安装柱,以及设置于所述安装柱上且用于安装所述磁传感器的安装座;所述图像采集模块安装在所述安装座上。3.如权利要求2所述的用于桥隧检测的爬壁机器人,其特征在于:所述安装座与所述安装柱之间设置有高度调节组件,所述安装座通过高度调节组件与所述安装柱连接,并能够通过所述高度调节组件来调节所述安装座在所述安装柱上的高度位置。4.如权利要求3所述的用于桥隧检测的爬壁机器人,其特征在于:所述安装柱上设有若干个沿垂直于机身底面的方向间隔布置的横向固定孔;所述高度调节组件包括插销,以及与所述安装座固定连接的固定环;所述固定环套设于安装柱上,且具有与所述横向固定孔相对应的安装孔,使得能够通过插销与安装孔和横向固定孔插接配合的方式来调节所述安装座在所述安装柱上的高度位置。5.如权利要求1所述的用于桥隧检测的爬壁机器人,其特征在于:机身的底部设置有间隔布置的两个吸附模块。6.如权利要求1所述的用于桥隧检测的爬壁机器人,其特征在于:所述吸附模块包括与所述控制模块电连接的离心风机,以及与所述控制模块电连接且用于带动所述离心风机转动的电机;所述离心风机的进风口设置于机身的底部。7.如权利要求6所述的用于桥隧检测的爬壁机器人,其特征在于:机身的底部上对应于所述离心风机进风口的位置设置有围绕所述离心风机进风口一周布置的密封围裙结构;所述密封围裙结构能够在机身底部形成一个密封腔体。8.如权利要求7所述的用于桥隧检测的爬壁机器人,其特征在于:还包括与所述控制模块数据传输连接的气压检测模块;所述气压检测模块的检测端设置于所述密封腔体内。9.如权利要求1所述的用于桥隧检测的爬壁机器人,其特征在于:还包括设置于机身内且与所述控制模块供电传输连接的电源模块,所述电源模块能够为所述吸附模块、所述图像采集模块、所述动力模块和所述磁传感模块提供电能。
技术总结
本实用新型具体涉及用于桥隧检测的爬壁机器人,包括机身和设置于机身内的控制模块,还包括设置于机身底部且用于将机身吸附在桥隧表面的吸附模块,与控制模块数据传输连接的图像采集模块,与控制模块电连接的动力模块,以及与控制模块数据传输连接的磁传感模块;动力模块能够以履带步进的方式带动机身在桥隧表面移动;磁传感模块包括设置于机身顶部前端的安装支架,以及安装于安装支架上且检测端正对桥隧表面的磁传感器;图像采集模块安装在安装支架上且其图像采集端与磁传感器检测端的朝向一致。本实用新型中的爬壁机器人移动稳定性好,能够为磁信号检测提供稳定的检测环境和检测距离,从而能够辅助提升爬壁机器人的磁信号检测效果。号检测效果。号检测效果。
技术研发人员:李凌云 杨建喜 李昊
受保护的技术使用者:青海交通投资有限公司
技术研发日:2021.02.26
技术公布日:2021/11/17
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。