1.本实用新型涉及护理器械技术领域,特别涉及一种重心可调节式折叠轮椅。
背景技术:
2.轮椅,是一种用于下肢残疾者的专用代步工具。轮椅车根据驱动方式可以分为机动轮椅车和手摇轮椅车;手摇三轮车因其轮径较大,所以能适应多种道路行驶,主要是在户外作为较长距离的代步工具,并可以适当装栽货物;它具有行驶速度较快、省力等特点。机动轮椅车备有靠背、扶手和安全带限位,以保持使用者的身体稳定,并具有短距离手移动装置,以便故障时可手动移至安全或无碍交通地段。机动性强、燃料补充便捷、操作方便等特点。
3.随着时代发展与科技水平进步,现有市场中已将机动轮椅车制作成多样的形式,满足市场使用需求,但从舒适度、使用便捷度、安全性等诸多方面考量,现有的技术仍存在诸多技术缺陷:现有技术中的轮椅其靠背、座垫、推托可放平后与床对接,或者直接调整轮椅靠背、腿托与座垫之间的角度,但是在放平过程中,因为重心移动等问题,轮椅可能出现侧翻等情况,存在很大的安全隐患。
技术实现要素:
4.实用新型目的:针对现有技术中存在的问题,本实用新型提供一种重心可调节式折叠轮椅,在轮椅上设置重心调节机构,便于病患根据需要进行轮椅重心调节,防止轮椅侧翻,降低了轮椅的安全隐患。
5.技术方案:本实用新型提供了一种重心可调节式折叠轮椅,所述轮椅包括轮椅底座、车轮、靠背、座垫以及腿托加脚托,所述车轮转动连接于所述轮椅底座上,所述座垫设于所述轮椅底座上,所述靠背、腿托加脚托与所述座垫均转动连接,所述轮椅上还设有重心调节机构;
6.所述重心调节机构包括设置于轮椅底座上的滑轨支撑板、对称设置于滑轨支撑板上的一对滑轨,所述滑轨上设置第三驱动电机,所述座垫滑动连接于所述滑轨。
7.进一步地,所述车轮包括一对前轮与一对后轮,其均转动连接于所述轮椅底座上,所述一对后轮、一对前轮上设有驱动机构,驱动轮椅前后移动。
8.进一步地,所述驱动机构包括设置于一对所述后轮的第一驱动电机、固定于第一驱动电机输出轴的主动齿轮、固定于一对前轮中心轴的从动齿轮以及啮合于主动齿轮与从动齿轮之间的链条。
9.进一步地,所述前轮设置为全向轮,包括辊子件与轮子主体,所述辊子件包括辊子、辊子支架以及辊子主轴;所述辊子设置若干个,均通过对应的所述辊子支架固定安装在所述轮子主体上;所述辊子为圆台形,其转动连接于所述辊子主轴上。
10.进一步地,所述辊子件均与所述轮子主体成一定倾斜角度地固定安装在所述轮子主体上。
11.进一步地,所述倾斜角度为30~60
°
。
12.进一步地,所述靠背与所述座垫之间通过第一调角器转动连接,所述座垫与所述腿托加脚托之间通过第二调角器转动连接,所述第一调角器与所述第二调角器上均连接有第三驱动电机
13.进一步地,所述轮椅底座的前、后还分别设置有一对减震器。
14.进一步地,所述轮椅底座前、后还分别设置一对防倾轮。
15.有益效果:
16.1、本实用新型通过第一调角器、第二调角器实现座垫与靠背、腿托加脚托之间的角度调节,在实际安装使用时,可以通过驱动电机驱动第一、第二调角器自动实现轮椅放平成床体或者床体折叠为轮椅的操作,便于病患自己进行轮椅角度调节。
17.2、本实用新型在轮椅底座上设置重心调节机构,当病人调整轮椅角度时,根据轮椅上病患的体重以及其重心位置可以通过滑轨进行调节轮椅上的座垫位置,将其调节至平衡状态,防止轮椅翻车的情况出现。
18.3、本实用新型在轮椅的后轮位置设置轮毂驱动电机,并且通过链轮组件实现前后轮同时驱动。
19.4、本实用新型在前轮设置全向轮,能够有更好的爬升力(或抓地力);轮子能够顺利的行驶在较为复杂的路面(例如泥面,沙滩,崎岖不平的路面等),辊子件整体在安装过程中与竖直面形成30~60
°
的角,同时辊子能够绕着轴承自身转动,采用这样的结合方式,可以使轮子能够有水平和轮子自转两种运动。采用此设计方案的轮子,能够在控制电机控制下满足轮子的横向、纵向和自身旋转三种运行方式。
附图说明
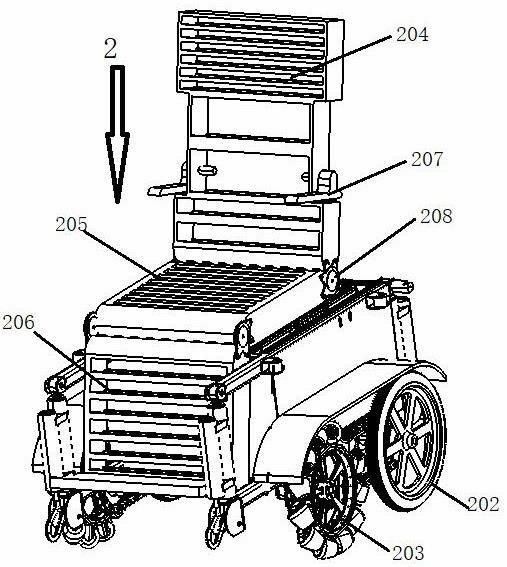
20.图1为本实用新型轮椅整体结构示意图;
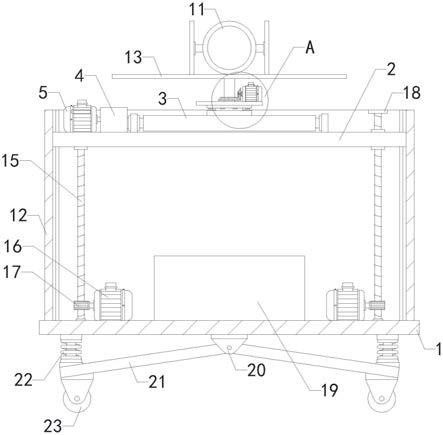
21.图2为本实用新型轮椅底座结构示意图;
22.图3为本实用新型轮椅驱动机构结构示意图;
23.图4为本实用新型轮椅靠背、座垫、腿托加脚托结构示意图;
24.图5为本实用新型轮椅的轮椅底座上重心调节机构工作原理图;
25.图6为本实用新型重心调节机构结构图;
26.图7为本实用新型轮椅上使用的全向轮整体结构示意图;
27.图8为本实用新型辊子件结构透视图。
28.其中,1
‑
重心调节机构,2
‑
轮椅,201
‑
轮椅底座,202
‑
后轮,203
‑
前轮,204
‑
靠背,205
‑
座垫,206
‑
腿托加脚托,207
‑
扶手,208
‑
第一调角器,209
‑
第二调角器,210
‑
滑轨支撑板,211
‑
滑轨,212
‑
滑轨基座槽,213
‑
滑条,214
‑
减震器,215
‑
防倾轮,216
‑
第一驱动电机,217
‑
主动齿轮,218
‑
从动齿轮,219
‑
链条,220
‑
第二驱动电机,3
‑
辊子件,301
‑
辊子,302
‑
辊子支架,303
‑
辊子主轴,304
‑
轴承,4
‑
轮子主体。
具体实施方式
29.下面结合附图对本实用新型进行详细的介绍。
30.在本实用新型的描述中,需要理解的是,术语“中心”、“纵向”、“横向”、“长度”、“宽
度”、“厚度”、“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”、
ꢀ“
顺时针”、“逆时针”、“轴向”、“径向”、“周向”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本实用新型和简化描述,而不是指示或暗示所指的装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本实用新型 的限制。
31.此外,术语“第一”、“第二”仅用于描述目的,而不能理解为指示或暗示相对重要性或者隐含指明所指示的技术特征的数量。由此,限定有“第一”、“第二”的特征可以明示或者隐含地包括至少一个该特征。在本实用新型的描述中,“多个”的含义是至少两个,例如两个,三个等,除非另有明确具体的限定。
32.在本实用新型中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”、“固定”等术语应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或成一体;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通或两个元件的相互作用关系,除非另有明确的限定。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本实用新型中的具体含义。
33.本实用新型公开了一种重心可调节式折叠轮椅,该轮椅2包括轮椅底座201、一对后轮202、一对前轮203、靠背204、座垫205、腿托加脚托206以及一对扶手207,一对后轮202与一对前轮203均转动连接于轮椅底座201上,座垫205设于轮椅底座201上,靠背204与座垫205之间通过第一调角器208转动连接,座垫205与腿托加脚托206之间通过第二调角器209转动连接,第一调角器208、第二调角器209分别与第三驱动电机连接,通过第三驱动电机驱动第一调角器208、第二调角器209进行调节靠背204、腿托加脚托206的角度。扶手207转动连接于靠背204上,一对后轮202、一对前轮203上设有驱动机构,驱动轮椅2前后移动。驱动机构包括设置于一对后轮202的第一驱动电机216、固定于第一驱动电机216输出轴的主动齿轮217、固定于一对前轮203中心轴的从动齿轮218以及啮合于主动齿轮217与从动齿轮218之间的链条219,第一驱动电机216驱动主动齿轮217通过链条219带动从动齿轮218转动。这样整个轮椅2只需要在后轮202上设置驱动机构,并且可以保证前后轮同步运动。
34.轮椅底座201上表面还设有重心调节机构1,重心调节机构1包括设置于轮椅底座201上的滑轨支撑板210、对称设置于滑轨支撑板210上的一对滑轨211,滑轨211包括固定于轮椅底座201的滑轨基座槽212以及固定于座垫205下表面的滑条212,滑条212滑动连接于滑轨基座槽212内。滑轨211上设置第二驱动电机220。实际使用时,可通过第二驱动电机220控制滑轨211的滑条212带动座垫205移动,根据重心判断当前座垫205需要移动的距离,并通过第三驱动电机控制滑轨211带动座垫205移动至满足要求即可。
35.轮椅底座201的前、后还分别设置有一对减震器214。通过减震器214可以减少轮椅行进过程中的振动,轮椅行驶在复杂路面时,可以减少振动。轮椅底座201前端与后端还分别设置一对防倾轮215,防倾轮215通过支杆设于轮椅2上,防倾轮215转动连接于支杆上,当轮椅2在路面前进或者后退时,轮椅底座201的前、后防倾轮215分别与地面接触。
36.为了便于轮椅2在原地小角度旋转,或者便于轮椅2爬坡且在复杂路面前进,本实施方式中,轮椅2的一对前轮203设置为全向轮,包括辊子件3与轮子主体4,辊子件3包括辊子301、辊子支架302以及辊子主轴303;辊子301设置若干个,均通过对应的辊子支架302固定安装在轮子主体4上;辊子301为圆台形(轮子两边是一边大,一边小),其转动连接于辊子
主轴303上。在辊子301内部两端固定设置有一对轴承304,辊子主轴303一端固定设置在辊子支架302,另一端固定设置在轴承304内,使辊子301可旋转地设置在辊子支架302上。
37.本实施方式中,辊子件3共计12个,均与轮子主体4成45
°
倾斜角度地固定安装在轮子主体4上。
38.本实用新型的全向轮能够行驶在各种复杂路面,畅通无阻;同时该轮子能够横向、纵向和自身旋转三种方式,满足轮子的多种行驶方式,实现其小角度的转动。
39.工作原理:
40.该轮椅2上还设置陀螺仪传感器与加速度传感器,陀螺仪传感器与加速度传感器均与一控制器连接,控制器分别与第一驱动电机216、第二驱动电机222、第三驱动电机以及4个电动推杆214连接。
41.重心调节机构1控制过程如下:
42.s1:控制器启动第一驱动电机216驱动轮椅2前进或者后退。
43.s2:控制器启动第二驱动电机222放平座垫205与靠背204、腿托加脚托206,在放平过程中,陀螺仪传感器与加速度传感器实时检测轮椅2重心位置,当出现重心移位时,控制器同时控制第三驱动电机驱动座垫205在滑轨211上滑动,滑动至满足要求的重心范围内。
44.s3:控制器启动第二驱动电机控制抬升座垫205与靠背204、腿托加脚托206之间的角度,在抬升过程中,陀螺仪传感器与加速度传感器实时检测轮椅2重心位置,当出现重心移位时,控制器同时控制第三驱动电机驱动座垫205在滑轨211上滑动,滑动至满足要求的重心范围内。
45.上述实施方式只为说明本实用新型的技术构思及特点,其目的在于让熟悉此项技术的人能够了解本实用新型的内容并据以实施,并不能以此限制本实用新型的保护范围。凡根据本实用新型精神实质所做的等效变换或修饰,都应涵盖在本实用新型的保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。