1.本实用新型涉及检测技术领域,特别涉及一种正交调节装置及检测设备。
背景技术:
2.在玻璃基板线路的开路及短路缺陷检测设备中,两个检测装置需要在基板的同一条线路上进行受放电测试来检测基板线路的开路及短路缺陷,为了保证两个检测装置在检测过程中始终能够在玻璃基板的同一条线路两端进行受放电检测,需要保证设备的x轴与y轴相互正交垂直。因此需要设计一套调节机构进行调节,使得设备的x、y轴相互正交垂直。
技术实现要素:
3.本实用新型公开了一种正交调节装置及检测设备,用于实现基板检测设备龙门的正交垂直调节。
4.为达到上述目的,本实用新型提供以下技术方案:
5.第一方面,本实用新型提供一种正交调节装置,包括:基台、龙门、承载平台、驱动机构和标定相机;
6.所述基台上设有平行设置的第一导轨和第二导轨;所述第一导轨上滑动安装有第一基板,所述龙门一端通过第一调整机构与所述第一基板连接,另一端与所述第二导轨配合,以使所述龙门的延伸方向与所述第一导轨的延伸方向之间的角度可调;所述第一调整机构具有调整状态和锁紧状态,当所述第一调整机构处于所述调整状态时,所述龙门可相对所述第一基板动作以调节所述龙门的延伸方向与所述第一导轨的延伸方向之间的角度;当所述第一调整机构处于所述锁紧状态时,所述龙门通过所述第一调整机构与所述第一基板相对固定;
7.所述龙门上设有沿所述龙门的长度方向延伸的第三导轨;
8.所述承载平台安装于所述基台且位于所述第一导轨和所述第二导轨之间,且所述承载平台背离所述基台一侧具有对准面,所述对准面上具有垂直标识;所述垂直标识用于标定相互垂直的第一方向和第二方向;
9.所述标定相机滑动安装于所述第三导轨,且所述标定相机的采集方向朝向所述对准面;
10.所述驱动机构与所述承载平台传动连接,用于驱动所述承载平台相对所述基台动作;
11.所述标定相机、所述垂直标识以及所述驱动机构配合以使所述第一方向与所述第一导轨的延伸方向平行;
12.所述标定相机、所述垂直标识以及所述第一调整机构配合以使所述第三导轨的延伸方向与所述第二方向平行。
13.上述正交调节装置在基台上安装第一导轨、第二导轨和承载平台,承载平台的对准面上设有垂直标识;龙门一端通过第一调整机构安装于第一基板上,且第一基板与第一
导轨滑动连接,龙门另一端与第二导轨配合,此处配合包括龙门另一端可沿第二导轨滑动;标定相机滑动安装于龙门的第三导轨,标定相机可以采集对准面上的垂直标识,并以此提供调整方案,从而通过驱动机构驱动承载平台动作以使第一方向与第一导轨或第二导轨的延伸方向平行,从而以第一导轨或第二导轨为基准实现垂直标识第一方向的标定,进而通过第一调整机构调整龙门的延伸方向与第二方向之间的角度,使第三导轨的延伸方向与第二方向平行,从而实现第三导轨的标定;并且,由于第一方向与第二方向垂直,故而保证了第三导轨与第一导轨和第二导轨均垂直。
14.因此,本实用新型通过标定相机拍摄承载平台上的垂直标识,可以实现基板检测设备龙门的垂直调节,能够将基板检测设备的两轴(即第一导轨和第三导轨)垂直度调节至微米级的角度偏差精度,从而是解决了两个检测装置无法始终在玻璃基板的同一条线路两端进行受放电检测的技术问题。
15.可选地,所述标定相机为ccd相机。
16.可选地,所述垂直标识包括第一十字标记、第二十字标记和第三十字标记,所述第一十字标记与所述第二十字标记沿所述第一方向排列,所述第二十字标记与所述第三十字标记沿所述第二方向排列。
17.可选地,所述垂直标识还包括第四十字标记,所述第四十字标记与所述第三十字标记沿所述第一方向排列,所述第四十字标记与所述第一十字标记沿所述第二方向排列。
18.可选地,所述第一调整机构包括:第一调节螺栓和第一安装座,所述第一安装座与所述第一基板相对固定;所述第一调节螺栓一端通过第一螺母与所述第一安装座连接,另一端与所述龙门螺纹连接。
19.可选地,所述第一安装座包括第一连接部和第二连接部,所述第二连接部通过所述第一连接部与所述第一基板连接,所述龙门与所述第一连接部以及所述第二连接部配合形成u形槽结构,所述第二连接部上设有用于安装所述第一调节螺栓的第一安装孔。
20.可选地,所述第二导轨上滑动安装有第二基板,所述龙门通过第二调整机构与所述第二基板连接;
21.所述第二调整机构具有调整状态和锁紧状态,当所述第二调整机构处于所述调整状态时,所述龙门可相对所述第二基板动作以调节所述龙门的延伸方向与所述第二导轨的延伸方向之间的角度;当所述第二调整机构处于所述锁紧状态时,所述龙门通过所述第二调整机构与所述第二基板相对固定。
22.可选地,所述第二调整机构包括:第二调节螺栓和第二安装座,所述第二安装座与所述第二基板相对固定;
23.所述第二调节螺栓一端通过第二螺母与所述第二安装座连接,另一端与所述龙门螺纹连接。
24.可选地,所述第二安装座包括第三连接部和第四连接部,所述第四连接部通过所述第三连接部与所述第二基板连接,所述龙门与所述第三连接部以及所述第四连接部配合形成u形槽结构,所述第四连接部上设有用于安装所述第二调节螺栓的第二安装孔。
25.可选地,所述基台朝向所述承载平台一侧设有凹陷部,所述驱动机构包括旋转电机,所述旋转电机位于所述凹陷部。
26.可选地,所述驱动机构还包括与所述旋转电机传动连接的连接板,所述连接板与
所述承载平台传动连接。
27.第二方面,本实用新型还提供一种检测设备,包括第一检测装置和第二检测装置以及如上任一项所述的正交调节装置;
28.所述第一检测装置通过标定相机滑动安装于第三导轨上;
29.所述第二检测装置滑动安装于所述第三导轨上。
附图说明
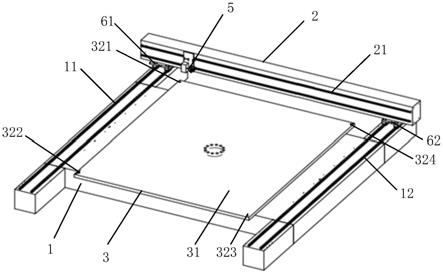
30.图1为本实用新型实施例提供的一种正交调节装置的三维立体图;
31.图2为本实用新型实施例提供的一种正交调节装置中垂直标识的示意图;
32.图3为本实用新型实施例提供的一种正交调节装置的俯视图;
33.图4为图3中a处放大图;
34.图5为本实用新型实施例提供的一种正交调节装置的主视图;
35.图6为图5中b处放大图;
36.图7为本实用新型实施例提供的一种正交调节装置的左视图;
37.图8为图7中c处放大图;
38.图9为调整步骤一的调节原理图;
39.图10为调整步骤二的调节原理图;
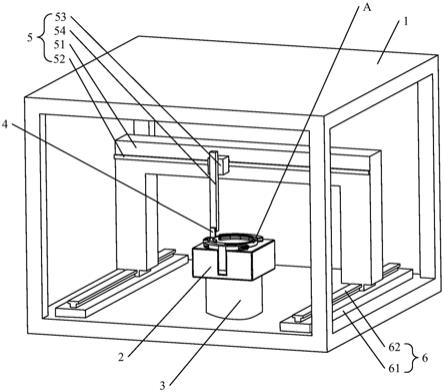
40.图11为本实用新型实施例提供的一种检测设备的三维立体图。
41.图标:1
‑
基台;10
‑
凹陷部;11
‑
第一导轨;12
‑
第二导轨;2
‑
龙门;21
‑
第三导轨;3
‑
承载平台;31
‑
对准面;32
‑
垂直标识;321
‑
第一十字标记;322
‑
第二十字标记;323
‑
第三十字标记;324
‑
第四十字标记;4
‑
驱动机构;41
‑
旋转电机;42
‑
连接板;5
‑
标定相机;61
‑
第一基板;62
‑
第二基板;71
‑
第一调整机构;711
‑
第一调节螺栓;712
‑
第一安装座;713
‑
第一螺母;7121
‑
第一连接部;7122
‑
第二连接部;72
‑
第二调整机构;721
‑
第二调节螺栓;722
‑
第二安装座;723
‑
第二螺母;7221
‑
第三连接部;7222
‑
第四连接部;8
‑
第一检测装置;9
‑
第二检测装置。
具体实施方式
42.下面将结合本实用新型实施例中的附图,对本实用新型实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本实用新型一部分实施例,而不是全部的实施例。基于本实用新型中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本实用新型保护的范围。
43.第一方面,如图1至图8所示,本实用新型实施例提供了一种正交调节装置,包括:基台1、龙门2、承载平台3、驱动机构4和标定相机5;基台1上设有平行设置(沿x轴)的第一导轨11和第二导轨12;第一导轨11上滑动安装有第一基板61,龙门2一端通过第一调整机构71与第一基板61连接,另一端与第二导轨12配合,以使龙门2的延伸方向(沿y轴)与第一导轨11的延伸方向之间的角度可调;第一调整机构71具有调整状态和锁紧状态,当第一调整机构71处于调整状态时,龙门2可相对第一基板61动作以调节龙门2的延伸方向与第一导轨11的延伸方向之间的角度;当第一调整机构71处于锁紧状态时,龙门2通过第一调整机构71与第一基板61相对固定;龙门2上设有沿龙门2的长度方向延伸的第三导轨21;承载平台3安装
于基台1且位于第一导轨11和第二导轨12之间,且承载平台3背离基台1一侧具有对准面31,对准面31上具有垂直标识32;垂直标识32用于标定相互垂直的第一方向(如图2中x方向)和第二方向(如图2中y方向);标定相机5滑动安装于第三导轨21,且标定相机5的采集方向朝向对准面31;驱动机构4与承载平台3传动连接,用于驱动承载平台3相对基台1动作;标定相机5、垂直标识32以及驱动机构4配合以使第一方向与第一导轨11的延伸方向平行;标定相机5、垂直标识32以及第一调整机构71配合以使第三导轨21的延伸方向与第二方向平行。
44.上述正交调节装置由大理石作为基台1,在基台1上安装第一导轨11、第二导轨12(第一导轨11和第二导轨12可合称作x轴导轨)和承载平台3,承载平台3的对准面31上设有垂直标识32;龙门2一端通过第一调整机构71安装于第一基板61上,且第一基板61与第一导轨11滑动连接,龙门2另一端与第二导轨12配合,此处配合包括龙门2另一端可沿第二导轨12滑动;标定相机5滑动安装于龙门2的第三导轨21,标定相机5可以采集对准面31上的垂直标识32,并以此提供调整方案,从而通过驱动机构4驱动承载平台3动作以使第一方向与第一导轨11或第二导轨12的延伸方向平行,从而以第一导轨11或第二导轨12为基准实现第一方向的标定,进而通过第一调整机构71调整龙门2的延伸方向与第二方向之间的角度,使第三导轨21的延伸方向与第二方向平行,从而实现第三导轨21的标定;并且,由于第一方向与第二方向垂直,故而保证了第三导轨21与第一导轨11和第二导轨12均垂直。
45.因此,本实用新型通过标定相机5拍摄承载平台3上的垂直标识32,可以实现基板检测设备龙门2的垂直调节,能够将基板检测设备的两轴(即第一导轨11和第三导轨21)垂直度调节至微米级的角度偏差精度,从而是解决了两个检测装置无法始终在玻璃基板的同一条线路两端进行受放电检测的技术问题。
46.可选地,标定相机5为ccd(charge coupled device,电荷耦合器件)相机。ccd相机通过相机连接板42安装在第三基板上,第三基板与第三导轨21滑动配合。
47.一种可能实现的方式中,沿着x轴导轨及第三导轨21(可称作y轴导轨)移动第三基板至垂直标识32的位置,使得ccd相机视野中心十字线与承载平台3上的垂直标识32的中心对齐,然后沿着x轴导轨移动龙门2,通过ccd相机判断移动过程中ccd相机视野中心十字线的移动轨迹与承载平台3上的垂直标识32标定的第一方向即x方向之间的偏转角度,通过驱动机构4驱动承载平台3动作补偿该偏转角度,使得承载平台3的x方向与设备x轴即x轴导轨平行;在补偿偏转角度后,沿着x、y轴导轨移动第三基板至垂直标识32的位置,使得ccd相机视野中心十字线与承载平台3上的垂直标识32中心对齐,然后沿着y轴导轨移动第三基板,判断移动过程中ccd相机视野中心十字线的移动轨迹与承载平台3上的垂直标识32标定的第二方向即y方向之间的偏转角度,通过第一调整机构71调节龙门2在x方向的位置,使得y轴导轨与承载平台3的y方向平行,即可完成龙门2的正交垂直调节,使得设备的x、y轴相互正交垂直,其精度可达到微米级。
48.需要说明的是,垂直标识32的主要作用是标定相互垂直的第一方向和第二方向,因而凡是能实现上述功能的结构均可称作本实施例所称的垂直标识32,例如:矩形框、至少三个的定位点(连线能形成直角)、十字线或者至少三个十字标记(连线能形成直角)。
49.方式一,垂直标识32包括第一十字标记321、第二十字标记322和第三十字标记323,第一十字标记321与第二十字标记322沿第一方向排列,第二十字标记322与第三十字标记323沿第二方向排列。
50.本方式中,调节步骤一,沿着x、y轴导轨移动第三基板至第一十字标记321的位置,使得ccd相机视野中心十字线与承载平台3上的第一十字标记321中心对齐,然后沿着x轴导轨移动龙门2至第二十字标记322的位置,使得ccd相机视野中心十字线与承载平台3上的第二十字标记322中心在x轴方向对齐,再沿着y轴导轨移动第三基板,移动距离为a,使得相机视野中心十字线与承载平台3上的第二十字标记322中心在y轴方向上对齐,b为第一十字标记321和第二十字标记322间距离,那么θ=arctan(a/b),通过驱动机构4驱动承载平台3动作补偿θ角使得承载平台3的x方向与设备x轴平行;调节步骤二,在补偿θ角后,相机视野中心十字线与承载平台3上的第二十字标记322中心对齐,然后沿着y轴导轨移动第三基板,使得ccd相机视野中心十字线与承载平台3上的第三十字标记323中心在y轴方向对齐,此时通过第一调整机构71调节龙门2在x轴方向的位置,使得ccd相机视野中心十字线与承载平台3上的第三十字标记323中心在x轴方向对齐后,锁紧龙门2与第一基板61,即可完成龙门2的正交垂直调节,使得设备的x、y轴相互正交垂直,其精度可达到微米级。
51.方式二,在方式一的基础上,垂直标识32还包括第四十字标记324,第四十字标记324与第三十字标记323沿第一方向排列,第四十字标记324与第一十字标记321沿第二方向排列。
52.本方式中,调节原理图参照图9和图10所示,调节步骤一,沿着x、y轴导轨移动第三基板至第一十字标记321的位置,使得ccd相机视野中心十字线与承载平台3上的第一十字标记321中心对齐,然后沿着x轴导轨移动龙门2至第二十字标记322的位置,使得ccd相机视野中心十字线与承载平台3上的第二十字标记322中心在x轴方向对齐,再沿着y轴导轨移动第三基板,移动距离为a,使得相机视野中心十字线与承载平台3上的第二十字标记322中心在y轴方向上对齐,b为第一十字标记321和第二十字标记322间距离,那么θ=arctan(a/b),通过驱动机构4驱动承载平台3动作补偿θ角使得承载平台3的x方向与设备x轴平行;调节步骤二,在补偿θ角后,沿着x、y轴导轨移动第三基板至第一十字标记321的位置,使得ccd相机视野中心十字线与承载平台3上的第一十字标记321中心对齐,然后沿着y轴导轨移动第三基板,使得ccd相机视野中心十字线与承载平台3上的第四十字标记324中心在y轴方向对齐,此时通过第一调整机构71调节龙门2在x轴方向的位置,使得ccd相机视野中心十字线与承载平台3上的第四十字标记324中心在x轴方向对齐后,锁紧龙门2与第一基板61,即可完成龙门2的正交垂直调节,使得设备的x、y轴相互正交垂直,其精度可达到微米级。
53.需要说明的是,在上述调节步骤二中,调节龙门2在x轴方向的位置时,可以仅调节龙门2靠近第一导轨11的一端,也可以同时调节龙门2的两端。具体龙门2与第一导轨11和第二导轨12的配合参考如下几种方式:
54.方式一,龙门2一端通过第一调整机构71与第一基板61连接,另一端直接与第二基板62相对固定,其中,第一基板61与第一导轨11滑动配合,第二基板62与第二导轨12滑动配合;具体地,第一基板61通过两个滑块和一个垫块组合成的滑槽结构与第一导轨11滑动连接;第二基板62通过两个滑块和一个垫块组合成的滑槽结构与第二导轨12滑动连接。
55.方式二,龙门2一端通过第一调整机构71与第一基板61连接,另一端通过第二调整机构72与第二基板62连接,其中,第一基板61与第一导轨11滑动配合,第二基板62与第二导轨12滑动配合;具体地,第一基板61通过两个滑块和一个垫块组合成的滑槽结构与第一导轨11滑动连接;第二基板62通过两个滑块和一个垫块组合成的滑槽结构与第二导轨12滑动
连接。需要说明的是,第二调整机构72具有调整状态和锁紧状态,当第二调整机构72处于调整状态时,龙门2可相对第二基板62动作以调节龙门2的延伸方向与第二导轨12的延伸方向之间的角度;当第二调整机构72处于锁紧状态时,龙门2通过第二调整机构72与第二基板62相对固定。具体地,第二调整机构72的具体结构可以与第一调整机构71相同,也可以与第一调整机构71不同。
56.一种可能实现的方式中,参照图3
‑
图6,第二调整机构72的具体结构可以与第一调整机构71相同。
57.参照图4,第一调整机构71包括:第一调节螺栓711和第一安装座712,第一安装座712与第一基板61相对固定;第一调节螺栓711一端通过第一螺母713与第一安装座712连接,另一端与龙门2螺纹连接。第一调整机构71还包括锁紧龙门2和第一基板61的螺钉。可选地,第一安装座712包括第一连接部7121和第二连接部7122,第二连接部7122通过第一连接部7121与第一基板61连接,龙门2与第一连接部7121以及第二连接部7122配合形成u形槽结构,第二连接部7122上设有用于安装第一调节螺栓711的第一安装孔。第二调整机构72包括:第二调节螺栓721和第二安装座722,第二安装座722与第二基板62相对固定;第二调节螺栓721一端通过第二螺母723与第二安装座722连接,另一端与龙门2螺纹连接。第二调整机构72还包括锁紧龙门2和第二基板62的螺钉。可选地,第二安装座722包括第三连接部7221和第四连接部7222,第四连接部7222通过第三连接部7221与第二基板62连接,龙门2与第三连接部7221以及第四连接部7222配合形成u形槽结构,第四连接部7222上设有用于安装第二调节螺栓721的第二安装孔。
58.具体地,该第一安装孔(或第二安装孔)可以为槽孔,槽孔的开口方向背离承载平台3,参照图4和图6,第一螺母713(或第二螺母723)通过第一调节螺栓711(或第二调节螺栓721)的螺栓头将第一调节螺栓711(或第二调节螺栓721)压紧在槽孔内。
59.在上述调节步骤二中,调节龙门2在x轴方向的位置时,先松开龙门2与第一基板61的连接螺钉,再通过第一调节螺栓711和/或第二调节螺栓721调节龙门2在x轴方向的位置,调整好后旋紧螺钉。
60.可选地,基台1朝向承载平台3一侧设有凹陷部10,驱动机构4包括旋转电机41,旋转电机41位于凹陷部10。
61.在上述调节步骤一中,通过旋转电机41补偿θ角使得设备x轴与承载平台3x方向平行。
62.可选地,驱动机构4还包括与旋转电机41传动连接的连接板42,连接板42与承载平台3传动连接。参照图7和图8,承载平台3通过连接板42与旋转电机41连接,承载平台3可随着旋转电机41同步旋转。
63.本实施例通过在承载平台3上雕刻四个高精度且相互正交垂直的十字标记作为参照物进行调节,通过旋转电机41与调节螺栓相配合,实现设备x、y轴的正交垂直调节。
64.第二方面,如图11所示,本实用新型的实施例还提供一种检测设备,包括第一检测装置8和第二检测装置9以及如上任一种正交调节装置;第一检测装置8通过标定相机5滑动安装于第三导轨21上;第二检测装置9滑动安装于第三导轨21上。
65.在大理石基台1上安装x轴导轨及旋转电机41,承载平台3通过连接板42与旋转电机41连接,承载平台3可随着旋转电机41同步旋转,每2个x轴滑块上安装1个x轴垫块,每2个
x轴垫块上安装1个x轴基板(包括第一基板61和第二基板62),龙门2通过螺钉连接在x轴基板上,y轴导轨安装在龙门2上,每2个y轴滑块上安装1个y轴垫板,y轴垫板上分别安装第三基板和第四基板,第三基板上安装第一检测装置8及ccd相机,ccd相机通过相机连接板42安装在第三基板上,第四基板上安装第二检测装置9,第一安装座712安装在第一基板61上,第二安装座722安装在第二基板62上,第一调节螺栓711安装在第一安装座712上,第二调节螺栓721安装在第二安装座722上,并于龙门2相连接。龙门2可沿x轴导轨滑动,龙门2上的检测装置可沿y轴导轨移动。
66.本实施例通过ccd相机拍摄承载平台3上的十字标记,可以实现基板检测设备龙门2的正交垂直调节,能够将基板检测设备的x、y轴垂直度调节至微米级的角度偏差精度,从而是解决了第一检测装置8与第二检测装置9无法始终在玻璃基板的同一条线路两端进行受放电检测的技术问题。
67.显然,本领域的技术人员可以对本实用新型实施例进行各种改动和变型而不脱离本实用新型的精神和范围。这样,倘若本实用新型的这些修改和变型属于本实用新型权利要求及其等同技术的范围之内,则本实用新型也意图包含这些改动和变型在内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。