高分辨
‑
高精度stokes
‑
mueller成像仪及其校准方法
技术领域
1.本发明属于成像系统设计和校准技术领域,特别涉及一种高分辨
‑
高精度mueller成像仪及其校准方法。
背景技术:
2.stokes
‑
mueller成像仪能获取偏振光的stokes矢量和被测目标的mueller矩阵,mueller矩阵包含了目标全部的偏振信息,反映出目标的结构信息。利用stokes
‑
mueller成像仪观测各类样品的结构被广泛应用于各个领域。系统合理的设计和精确的标定对于获取目标更准确的stokes矢量和mueller矩阵,提高仪器的测量精度具有重要的意义。
3.利用全反射原理的偏振器如格兰棱镜,由于工艺、材料和工作原理限制,其视场角被限制在一定的范围内。stokes
‑
mueller成像仪的光源模块中包含柯勒照明系统,物镜模块包含高na物镜,二者都会使经过偏振态产生模块和偏振态分析模块的光线角度会大大超出偏振器的视场角要求,导致起偏和检偏能力下降。
4.本征值标定是stokes
‑
mueller成像仪合适的标定方法。但对于工作距离低于定标元件厚度与载玻片厚度之差的物镜而言,要把定标元件放入光路中,需移动物镜,导致校准和实际测量时光路不一致,透过偏振态分析器的光线角度发生变化后,其表现出来的偏振特性也会不同,校准得到的仪器矩阵并非实际测量时的仪器矩阵。
技术实现要素:
5.有鉴于此,本发明提供了一种mueller成像仪及其校准方法,该成像仪能够提高系统的损伤阈值,校准方法能提高测量精度。
6.实现本发明的技术方案如下:
7.一种高精度
‑
高分辨stokes
‑
mueller成像仪,包括光源、偏振态产生器、聚光镜、载物台、物镜、偏振态分析器、探测器及数据处理模块;光源出射的光经过偏振态产生器调制后,透过聚光镜,照射到载物台的样品上,样品透射出的光被物镜收集,经过偏振态分析器的调制后,被探测器接收后发送给数据处理模块;
8.偏振态产生器包括偏振器p1以及在垂直于光轴平面内可绕光轴旋转的波片r1;所述偏振器p1由两块格兰
‑
激光棱镜组合而成,偏振器p1中两个格兰
‑
激光棱镜的透光轴重合,但反射面方位相反;所述偏振态分析器包括偏振器p2以及在垂直于光轴平面内可绕光轴旋转的波片r2;所述偏振器p2由两块格兰
‑
激光棱镜组合而成,偏振器p2中两个格兰
‑
激光棱镜的透光轴重合,但反射面方位相反。
9.进一步地,本发明所述偏振态产生器由两块反射面方位角相差180
°
的格兰棱镜和可旋转的波片三部分组成;偏振态分析器由可旋转的波片和两块反射面方位角相差180
°
的格兰棱镜组成。
10.进一步地,本发明还包括集光镜和结像镜,所述集光镜设置于光源和偏振态产生器之间,所述结像镜设置在偏振态分析器和探测器之间。
11.一种高精度
‑
高分辨stokes
‑
mueller成像仪的校准方法,具体包含以下步骤:
12.把薄膜偏振器与一片载玻片贴合在一起形成薄膜偏振器
‑
载玻片组合,将薄膜延迟器和一片载玻片贴合在一起形成薄膜延迟器
‑
载玻片组合,作为定标元件使用;
13.分别对把单独的载玻片(即空气
‑
载玻片组合)、薄膜偏振器
‑
载玻片组合、薄膜延迟器
‑
载玻片组合分别作为定标元件进行mueller成像;
14.将上述标定元件放置在成像仪的不同的位置,利用标定元件mueller成像的灰度值,转化成与像面辐照度线性相关的值,利用所述转化后的值,计算成像仪中的每一器件的mueller矩阵,实现成像仪的校准。
15.进一步地,本发明所述像面辐照度线性相关的值为曝光量或者曝光量的线性函数。
16.进一步地,本发明采集已经诊断好的病变组织,利用高精度
‑
高分辨stokes
‑
mueller成像仪对其进行检测,通过roc曲线确定每一种病变组织检测所对应最可靠的偏振参数及其最佳阈值。
17.有益效果:
18.本发明提出的双偏振棱镜组合结构,在偏振态产生器和偏振态分析器中若使用格兰
‑
激光棱镜,消除了大角度漏光,并提高了系统的损伤阈值,使系统用于大功率实验和测量;若使用格兰
‑
汤普森或格兰
‑
泰勒棱镜,解决了由高na聚光镜和高na物镜产生的大角度光线通过偏振态产生器和偏振态分析器时会发生漏光的问题。棱镜组合能够接收的最大角度光线取决于棱镜组合的长宽比,设计系统时只需对棱镜的尺寸进行合理设计即可。
19.本发明提出的校准方法,通过将把薄膜偏振器与一片载玻片贴合在一起形成薄膜偏振器
‑
载玻片组合,将薄膜延迟器和一片载玻片贴合在一起形成薄膜延迟器
‑
载玻片组合,作为定标元件,在不移动物镜的情况下获得了更真实的仪器矩阵分布,且将载玻片也纳入仪器矩阵,考虑和剔除了mueller成像仪在生物切片测量中,载玻片对系统的影响,有助于获得更准确的样品的mueller像;能够计算出薄膜偏振器件贴在载玻片上后的mueller矩阵并自动修正,降低了工艺要求的同时也能修正该两项误差,提高了校准的精度;排除了相机的非线性响应干扰,使仪器无需每次使用前都进行校准,大大降低了使用仪器的时间成本。
附图说明
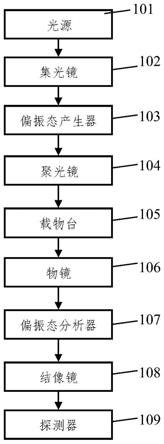
20.图1为高精度
‑
高分辨stokes
‑
mueller成像系统设计示意图。
21.其中,101
‑
光源,102
‑
集光镜,103
‑
偏振态产生器,104
‑
聚光镜,105
‑
载物台,106
‑
物镜,107
‑
偏振态分析器,108
‑
结像镜,109
‑
探测器。
22.图2为偏振态产生器p1示意图。
23.其中,231
‑
偏振棱镜g1,232
‑
偏振棱镜g2,233
‑
波片r1。
24.图3为偏振态分析器p2示意图。
25.其中,371
‑
波片r2,3,2
‑
偏振棱镜g1,373
‑
偏振棱镜g2。
具体实施方式
26.下面结合附图对本发明实施例进行详细描述。
27.需要说明的是,下文描述在所附权利要求书的范围内的实施例的各种方面。应显而易见,本文中所描述的方面可体现于广泛多种形式中,且本文中所描述的任何特定结构及/或功能仅为说明性的。基于本公开,所属领域的技术人员应了解,本文中所描述的一个方面可与任何其它方面独立地实施,且可以各种方式组合这些方面中的两者或两者以上。举例来说,可使用本文中所阐述的任何数目个方面来实施设备及/或实践方法。另外,可使用除了本文中所阐述的方面中的一或多者之外的其它结构及/或功能性实施此设备及/或实践此方法。
28.本技术实施例提供一种高精度
‑
高分辨stokes
‑
mueller成像仪,如图1所示,包括光源101、偏振态产生器103、聚光镜104、载物台105、物镜106、偏振态分析器107、探测器109及数据处理模块;光源101出射的光经过偏振态产生器103调制后,透过聚光镜104,照射到载物台105的样品上,样品透射出的光被物镜106收集,经过偏振态分析器107的调制后,被探测器109接收后发送给数据处理模块。其中,
29.偏振态产生器103包括偏振器p1以及在垂直于光轴平面内可绕光轴旋转的波片r1;所述偏振器p1由两块格兰棱镜组合而成,偏振器p1中两个格兰
‑
激光棱镜的透光轴重合,但反射面方位相反(即二者方位角相差180
°
)。;所述偏振态分析器107包括偏振器p2以及在垂直于光轴平面内可绕光轴旋转的波片r2;所述偏振器p2由两块格兰
‑
激光棱镜组合而成,偏振器p2中格兰棱镜放置的方式与p1相同,实现消除漏光。
30.本技术又一实施例,偏振态产生器103由两块反射面方位角相差180
°
的格兰棱镜231和232和可旋转的波片233三部分组成,如图2所示;偏振态分析器107由可旋转的波片371和两块反射面方位角相差180
°
的格兰棱镜372和373组成,如图3所示。
31.本技术又一实施例,该成像仪还包括集光镜102和结像镜108,所述集光镜102设置于光源101和偏振态产生器103之间,所述结像镜108设置在偏振态分析器107和探测器109之间。
32.集光镜是柯勒照明系统的必须组成,结像镜是配合相机使用的,使之以正确的倍率成像。
33.本发明提供的一种高精度
‑
高分辨stokes
‑
mueller成像仪的校准方法,具体包含以下步骤:
34.步骤一,计算探测器的响应特性曲线。
35.该过程可以通过现有技术实现,在此不做更为详细的说明和论述。
36.步骤二,把薄膜偏振器与一片载玻片贴合在一起形成薄膜偏振器
‑
载玻片组合,将薄膜延迟器和一片载玻片贴合在一起形成薄膜延迟器
‑
载玻片组合,作为定标元件使用。
37.步骤三,分别对把单独的载玻片(即空气
‑
载玻片组合)、薄膜偏振器
‑
载玻片组合、薄膜延迟器
‑
载玻片组合分别作为定标元件进行mueller成像,得到的四组结果分别表示为d1、d2、d3和d
air
;薄膜偏振器
‑
载玻片组合两次测量,测量结果d1、d2,薄膜延迟器
‑
载玻片组合的测量一次,测量结果d3,单独的载玻片(即空气
‑
载玻片组合)测量一次,测量结果d
air
。
38.步骤四,利用步骤一中得到的探测器响应特性曲线,把探测器输出的数据(一般为灰度值)转化为与辐照度线性相关的数值,本实施例中将探测器输出的数据转换为与辐照度线性相关的曝光量。从步骤开始,d1、d2、d3和d
air
均表示由灰度值转换得到的曝光量数值。
39.步骤五,以mueller矩阵为m1的薄膜偏振器
‑
载玻片组合,和对应的测量结果d1为例
进行说明:利用c1=d
air
‑1d1,得到方程m1w
‑
wc1=0;
40.步骤六,步骤五得到的方程可改写为c1=w
‑1m1w,此时矩阵c1和m1相似,有相同的特征值。m1的一般形式为:
[0041][0042]
一共五个未知数:a、b、c、d和θ。其中,a、b、c、d与m1的特征值有关,m1的特征值与c1相同:
[0043][0044][0045][0046][0047]
其中,λ1,λ2,λ3,λ4分别表示c1的4个特征值,排列顺序为从大到小。
[0048]
本步骤中已经获得了m1中5个未知参量中的4个a、b、c、d,后续需要继续求解θ来计算出m1。
[0049]
步骤七,为了求解θ,利用矩阵拉直运算(运算符为vec)和克罗内克积(运算符为),把步骤五得到的方程写成:
[0050][0051]
即,h
1 vec(w)=0
[0052]
其中,e代表4
×
4单位矩阵。两边同时左乘h
1t
,得到:
[0053]
h
1t
h
1 vec(w)=0
[0054]
步骤八,对d2和d3按照d1为例进行计算,把最后的方程相加,得到:
[0055]
lvec(w)=0,
[0056]
其中,
[0057]
l=h
1t
h1 h
2t
h2 h
3t
h3[0058]
此时,定标元件和方位角θ是矩阵l最小特征值和第二小特征值比值的平方根。
[0059][0060]
步骤九,用步骤六和步骤八得到的a、b、c、d和θ五个参数,修正定标元件的mueller矩;
[0061]
然后以此为依据,通过方程m1w
‑
wc1=0,d
air
=tw,求解薄膜偏振器件前后所有器件组合的mueller矩阵w和t,作为校准后的仪器矩阵。仪器矩阵包含两部分,以光的传播方向为后方,薄膜偏振器件之前所有器件组合(例如载玻片位于薄膜偏振器件之前或空气之
前),整体的mueller矩阵w;以及薄膜偏振器件之后所器件组合(例如物镜位于薄膜偏振器件之后),整体的mueller矩阵t。
[0062]
步骤十,在仪器的不同位置放入定标元件,可获得不同位置的定标元件前、后所有器件组合的mueller矩阵w和t,从而获得仪器中每一个单独器件的mueller矩阵。求解其它器件的mueller矩阵原理与此相同,不再赘述。
[0063]
本技术高精度
‑
高分辨stokes
‑
mueller成像仪检测时,最佳阈值的确定:
[0064]
采集已经诊断好的病变组织,利用高精度
‑
高分辨stokes
‑
mueller成像仪对其进行检测,通过roc曲线确定每一种病变组织检测所对应的最佳阈值。
[0065]
例如,以mueller成像仪检测结果的极分解参数之一“退偏”作为判断目标是否为癌变组织的指标为例,进行具体说明:
[0066]
假设,当mueller偏振仪的诊断结果显示退偏大于0.1时,认为该样本为癌变组织,检测结果为“阳性”,退偏小于或等于0.1时,认为该样本是正常组织,检测结果为“阴性”,0.1即作为阈值。
[0067]
检测样本数量为n,医院的诊断结果为“癌症”和“正常”两种结果,对样本中所有样品进行检测后,有下表中的数据:
[0068][0069]
改变“退偏”的阈值,例如0.15,此时a,b,c,d的值可能会发生变化。重复上述所有步骤,可以得到“退偏”阈值为0.15的点。不断变化阈值,最终绘制出以“退偏”为指标,mueller偏振仪检测癌症的roc曲线。
[0070]
计算本roc曲线上约登指数最大的点(约登指数的定义在技术方案步骤四中已做说明,此处不再赘述),其代表的阈值即为mueller偏振仪以“退偏”作为判断目标是否为癌变组织的最佳阈值。
[0071]
同理,将检测指标更换为mueller偏振仪检测结果的极分解参数之一的“延迟量”,重复上述步骤,可以获得“延迟量”对应的roc曲线,以及对应的最佳阈值。
[0072]
本技术高精度
‑
高分辨stokes
‑
mueller成像仪,利用通过比较“退偏”和“延迟量”对应的两条roc曲线的线下面积auc。auc指的是roc曲线与横轴,x=1两条线围成的面积。面积越大,证明该曲线对应的指标作为检测癌症的依据越可靠。面积在0.5以下,认为该试验无诊断价值,面积在0.5~0.7时,认为诊断价值一般,面积在0.7~0.9时诊断价值较高,面积在0.9以上认为诊断价值很高,roc曲线的auc更大;说明利用本技术高精度
‑
高分辨stokes
‑
mueller成像仪所检测的对应的指标roc曲线检测癌症更可靠,更换其它指标时亦如此。
[0073]
综上所述,以上仅为本发明的较佳实施例而已,并非用于限定本发明的保护范围。凡在本发明的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本发明的
保护范围之内。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。