1.本实用新型涉及一种机器人,特别涉及一种多平台机器人。
背景技术:
2.机器人,作为一种可用于在战场进行侦查、作战的一种作战工具,其在战场上的作用性不言而喻。但是实用新型人发现,现有机器人还存在如下问题,由于现有的机器作用较为单一,一般一种机器人只具备一种功能,例如:侦查机器人,只能用于进行侦查,排爆机器人只能用于排爆等,因此部队在作战时,为了能够满足不同的作战需求,就需要装备不同类型的机器人,这样就会直接影响部队的作战成本。
技术实现要素:
3.本实用新型的目的在于提供一种多平台机器人,可实现对不同功能设备的安装,从而大大降低了部队在作战时的成本。
4.为解决上述技术问题,本实用新型的实施方式提供了一种多平台机器人,包括:
5.安装平台,用于安装功能设备;
6.行驶机构,设置在所述安装平台上,用于带动所述安装平台进行移动和转向;
7.其中,所述功能设备上设有固定机构,所述固定机构用于与所述安装平台可拆卸连接,且所述功能设备有若干种,不同的所述功能设备上的所述固定机构的结构相同。
8.本实用新型的实施方式相对于现有技术而言,由于整个机器人包含了安装平台和行驶机构,并且安装平台可用于安装不同的功能设备,同时由于不同功能设备上均设有与安装平台可拆卸连接的固定机构,且不同功能设备上的固定机构的结构相同,因此使得一台机器人可搭载不同类型的功能设备,以满足不同的作战需求,从而大大减少了部队在作战时的成本。
9.进一步的,所述安装平台包括:
10.下壳,用于安装所述行驶机构;
11.上盖,可拆卸地设置在所述下壳上,用于打开或封闭所述下壳,还用于与所述固定机构可拆卸连接。
12.进一步的,所述固定机构包括:
13.安装板,设置在所述功能设备的底部;
14.卡扣组件,设置在所述安装板上,用于与所述上盖进行扣合连接。
15.进一步,所述功能设备为手枪设备、云台摄像机、机械手臂、水炮枪、化学探测设备和激光地图构建设备中的任意一种。
16.并且,当所述功能设备为手枪设备时,所述手枪设备包括:
17.安装架,包括设置在所述固定机构上的第一侧板和第二侧板,且所述第一侧板和所述第二侧板沿垂直于所述安装平台的前进方向相对设置;
18.壳体,设置于所述第一侧板和所述第二侧板之间;
19.手枪,可拆卸地设置在所述壳体内,包括:具有枪膛的枪体、用于插入枪体内的弹夹,可滑动地设置在所述枪体上的上膛套、可活动地设置在所述枪体上的扳机,所述上膛套用于在滑动时将所述弹夹内的子弹上膛至所述枪膛内的预设位置,且所述枪膛的指向为所述安装平台的前进方向;
20.第一驱动组件,设置在所述壳体内,用于扣动所述扳机;
21.第二驱动组件,分别与所述第一侧板和所述第二侧板固定连接,用于沿所述安装平台的前进方向驱动所述壳体进行翻转;
22.其中,所述壳体朝所述安装平台前进方向的一侧还开设与所述枪膛连通的出弹孔。
23.进一步的,所述壳体包括:
24.后壳,用于收纳所述手枪和所述第一驱动组件,并与所述第二驱动组件固定连接;所述手枪可拆卸地设置在所述后壳中;
25.盖板,设置于所述后壳上,用于打开或封闭所述后壳。
26.进一步的,所述手枪设备还包括:
27.安装块,可滑动地设置在所述壳体上,并与所述手枪的上膛套可拆卸连接,且所述安装块在所述壳体上的滑动方向与所述上膛套的滑动方向相同。
28.进一步的,所述手枪设备包括:
29.激光瞄准器,可拆卸地设置在所述壳体内;所述壳体上开设出光孔,用于引出所述激光瞄准器所射出的光线;其中,所述激光瞄准器所射出的光线平行于所述枪膛。
30.进一步的,所述行驶机构包括:
31.第一移动部和第二移动部,沿垂直于所述安装平台的前进方向相对固设在所述下壳的两侧;
32.主控板,设置于所述下壳内,并分别与所述第一移动部和所述第二移动部电性连接。
33.进一步的,所述安装平台整体处于所述第一移动部和所述第二移动部的中心位置。
34.进一步的,所述第一移动部包括:
35.两个第一滚轮,设置于所述下壳外,并沿所述安装平台的前进方向相对设置;
36.两个第一电机,设置于所述下壳上,并沿所述安装平台的前进方向相对设置;
37.其中,两个所述第一电机和两个所述第二电机均与所述主控板电性连接,各所述第一滚轮和各所述第一电机一一对应,且各所述第一电机的第一主轴分别与各自所对应的所述第一滚轮同轴固定,用于驱动各自所对应的所述第一滚轮进行滚动;
38.进一步的,所述第二移动部包括:
39.两个第二滚轮,设置于所述下壳外,并沿所述安装平台的前进方向相对设置;
40.两个第二电机,设置于所述下壳上,并沿所述安装平台的前进方向相对设置;
41.其中,各所述第二滚轮和各所述第二电机一一对应,且各所述第二电机的第二主轴分别与各自所对应的所述第二滚轮同轴固定,用于驱动各自所对应的所述第二滚轮进行滚动。
42.进一步的,两个所述第一滚轮和两个所述第二滚轮均为麦克纳姆轮或橡胶轮。
43.进一步的,所述第一电机的所述第一主轴与所述第一滚轮可拆卸连接;所述第二电机的所述第二主轴与所述第二滚轮可拆卸连接。
44.进一步的,所述第一主轴包括:
45.第一轴套,与所述第一电机固定连接;所述第一轴套上开设第一锁孔、与所述第一锁孔连通的第一滑道,且所述第一滑道沿垂直于所述第一轴套的轴线方向开设;
46.第一弹珠,可滚动地设置于所述第一滑道内;所述第一锁孔的孔径小于所述第一弹珠的外径;
47.第一推杆,设置于所述第一轴套内,并有部分插入所述第一滑道;所述第一推杆还用于沿所述第一滑道进行滑动,并在朝所述第一锁孔的方向进行滑动时推动所述第一弹珠进行滚动;
48.第一锁芯,沿所述第一轴套的轴线方向可滑动地设置在所述第一轴套内,用于在向远离所述第一轴套的底部滑动时推动所述第一推杆朝所述第一锁孔的方向进行滑动;
49.第一回弹部件,设置在所述第一轴套内,并抵住所述第一锁芯,用于沿所述第一轴套的轴线方向对所述第一锁芯施加回弹力;
50.其中,所述第一弹珠还用于在所述第一推杆朝向所述第一锁孔的方向滑动至极限位置时进入所述第一锁孔,与所述第一锁孔相互卡合;所述第一弹珠还用于在与所述第一锁孔相互卡后,并有部分从所述第一锁孔外露于所述第一轴套外;
51.所述第一滚轮套设于所述第一轴套,并与所述第一弹珠外露于所述第一轴套外的部分相互卡合。
52.进一步的,所述第二主轴包括:
53.第二轴套,与所述第二电机固定连接;所述第二轴套上开设第二锁孔、与所述第二锁孔连通的第二滑道,且所述第二滑道沿垂直于所述第二轴套的轴线方向开设;
54.第二弹珠,可滚动地设置于所述第二滑道内;所述第二锁孔的孔径小于所述第二弹珠的外径;
55.第二推杆,设置于所述第二轴套内,并有部分插入所述第二滑道;所述第二推杆还用于沿所述第二滑道进行滑动,并在朝所述第二锁孔的方向进行滑动时推动所述第二弹珠进行滚动;
56.第二锁芯,沿所述第二轴套的轴线方向可滑动地设置在所述第二轴套内,用于在向远离所述第二轴套的底部滑动时推动所述第二推杆朝所述第二锁孔的方向进行滑动;
57.第二回弹部件,设置在所述第二轴套内,并抵住所述第二锁芯,用于沿所述第二轴套的轴线方向对所述第二锁芯施加回弹力;
58.其中,所述第二弹珠还用于在所述第二推杆朝向所述第二锁孔的方向滑动至极限位置时进入所述第二锁孔,与所述第二锁孔相互卡合;所述第二弹珠还用于在与所述第二锁孔相互卡后,并有部分从所述第二锁孔外露于所述第二轴套外;
59.所述第二滚轮套设于所述第二轴套,并与所述第二弹珠外露于所述第二轴套外的部分相互卡合。
60.进一步的,所述第一移动部还包括:
61.第一履带,套设于两个所述第一滚轮;
62.所述第二驱动组件还包括:
63.第二履带,套设于两个所述第二滚轮。
64.进一步,所述第一滚轮和所述第二滚轮均为高强度塑料件。
65.进一步,所述多平台机器人还包括:
66.第一减震件,固设于所述下壳内;
67.第二减震件,固设于所述上盖上;
68.其中,所述第一减震件用于在所述上盖封闭所述下壳后,与所述第二减震件相互配合夹住所述主控板。
69.进一步,所述第一减震件为环绕于所述外围框架设置的柔性垫圈;
70.所述第二减震件包括:若干个设置于所述上盖上的柔性柱。
71.进一步的,所述下壳和所述上盖均为高强度铝材。
72.进一步的,所述多平台机器人还包括:
73.电源,用于向所述第一移动部、所述第二移动部和所述主控板供电;
74.电池仓,设置于所述下壳内,用于收纳并固定所述电源;所述电池仓还分别与所述第一移动部、所述第二移动部和所述主控板电性连接;
75.其中,所述下壳上开设与所述电池仓连通的开口,所述电源用于从所述开口插入所述电池仓内,且所述电源还用在插入所述电池仓内后,与所述电池仓电性导通。
76.进一步的,所述多平台机器人还包括:
77.遥控终端,与所述主控板进行通讯,用于向所述主控板发送控制信号,所述主控板用于根据所述遥控终端所发送的控制信号控制所述第一移动部和所述第二移动部;
78.摄像装置,设置于所述下壳上,并与所述遥控终端进行通讯,用于获取所述下壳四周的全景图像;
79.其中,所述遥控终端还用于显示所述摄像装置所获取到的所述全景图像。
80.进一步的,所述
81.摄像装置包括:
82.若干个摄像头,环设在所述下壳的四周,分别用于获取外界图像;
83.其中,各所述摄像头分别与所述遥控终端进行通讯,且所述遥控终端还用于将各所述摄像头所获取的图像进行组合拼接构成所述全景图像进行显示。
附图说明
84.图1为本实用新型第一实施方式的多平台机器人的结构示意图;
85.图2为本实用新型第一实施方式中上盖与安装板的装配示意图;
86.图3为本实用新型第一实施方式中手枪设备与安装平台的装配示意图;
87.图4为本实用新型第一实施方式中壳体的结构示意图;
88.图5为本实用新型第一实施方式中手枪设备的侧视示意图;
89.图6为本实用新型第一实施方式中安装平台的内部结构示意图;
90.图7位本实用新型第一实施方式中主控板在安装平台内的结构示意图;
91.图8为本实用新型第一实施方式的多平台机器人的电路模块框图;
92.图9为本实用新型第二实施方式中第一滚轮与第一电机主轴在分离时的示意图;
93.图10为图9中b
‑
b处的剖视图;
94.图11为本实用新型第二实施方式中第一滚轮与第一电机主轴在完成装配时的示意图;
95.图12为图11中c
‑
c处的剖视图;
96.图13为实用新型第二实施方式中第二滚轮与第二电机主轴在分离时的示意图;
97.图14为图13中a
‑
a处的剖视图;
98.图15为本实用新型第二实施方式中第二滚轮与第二电机主轴在完成装配时的示意图;
99.图16为图15中d
‑
d处的剖视图;
100.图17为本实用新型第三实施方式中主控板与安装平台的装配示意图;
101.图18为图17中a
‑
a处的剖视图;
102.图19为本实用新型第四实施方式中多平台机器人的结构示意图;
103.图20为本实用新型第四实施方式中多平台机器人的电路模块框图。
具体实施方式
104.为使本实用新型的目的、技术方案和优点更加清楚,下面将结合附图对本实用新型的各实施方式进行详细的阐述。然而,本领域的普通技术人员可以理解,在本实用新型各实施方式中,为了使读者更好地理解本技术而提出了许多技术细节。但是,即使没有这些技术细节和基于以下各实施方式的种种变化和修改,也可以实现本技术各权利要求所要求保护的技术方案。
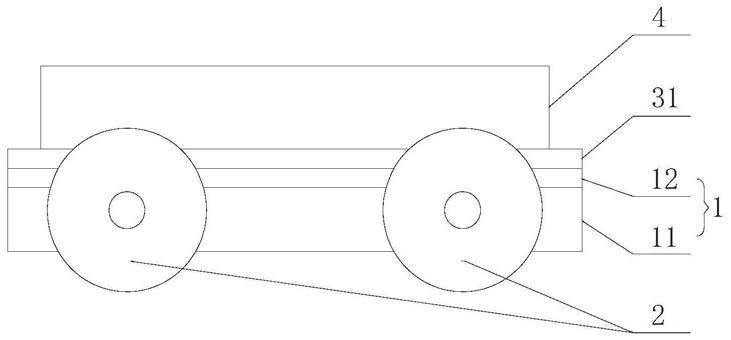
105.本实用新型的第一实施方式涉及一种多平台机器人,如图1所示,包括:用于安装功能设备的安装平台1、设置在安装平台1上的行驶机构2,该行驶机构2用于带动安装平台1进行移动和转向。
106.其中,结合图2所示,在本实施方式中,功能设备有若干种,且每种功能设备上均设有固定机构3,固定机构3用于与安装平台1可拆卸连接,且不同的所述功能设备上的固定机构3的结构相同。
107.通过上述内容不难发现,由于整个机器人包含了安装平台1和行驶机构2,并且安装平台1可用于安装不同的功能设备,同时由于不同功能设备上均设有与安装平台1可拆卸连接的固定机构3,且不同功能设备上的固定机构3的结构相同,因此使得一台机器人可搭载不同类型的功能设备,以满足不同的作战需求,从而大大减少了部队在作战时的成本。
108.具体的说,如图1和图2所述,安装平台1包括:用于安装行驶机构2的下壳11、可拆卸地设置在下壳11上的上盖12,上盖12用于打开或封闭下壳11。而固定机构3包括:设置在功能设备底部的安装板31、设置在安装板31上的卡扣组件32。其中,卡扣组件32用于与上盖12进行扣合连接,从而实现功能设备在机器人上的安装。
109.并且,在本实施方式中,为了实现卡扣组件32与上盖12之间的扣合连接,如图2 所示,卡扣组件32包括多个设置在安装板31上的卡扣321,而上盖12上开设多个卡槽 121,且卡扣321的数量与卡槽121的数量相同,并一一对应。各卡扣321分别用于插入各自所对应的卡槽121内,实现与上盖12的扣合。
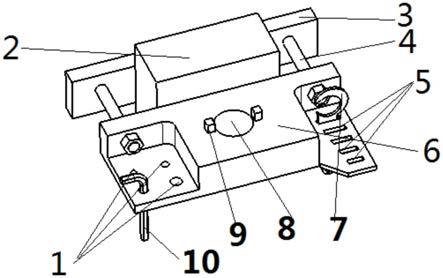
110.另外,值得一提的是,在本实施方式中,如图3所示,功能设备为手枪设备4,并且该手枪设备4由安装架41、壳体42、设置在壳体42内的手枪43、第一驱动组件44 和第二驱动组
件45构成。其中,如图3所示,安装架41包括:设置在固定机构3的安装板31上的第一侧板411和第二侧板412,且第一侧板411和第二侧板412分别沿垂直于安装平台1的前进方向相对设置。同时,壳体42设置于第一侧板411和第二侧板412 之间。此外,手枪43可拆卸地设置在壳体42内。并且,如图3所示,该手枪43包括:具有枪膛431的枪体432、用于插入枪体432内的弹夹433、可滑动地设置在枪体432上的上膛套434、可活动地设置在枪体432上的扳机435。上膛套434用于在滑动时将弹夹 433内的子弹上膛至枪膛431内的预设位置,且在本实施方式中,枪膛431的指向为安装平台1的前进方向,并且壳体42朝安装平台1前进方向的一侧还开设与枪膛431连通的出弹孔46。另外,第一驱动组件44设置在壳体42内用于扣动扳机435,而第二驱动组件45分别与第一侧板411和第二侧板412固定连接,该第二驱动装置45还用于沿安装平台1的前进方向驱动壳体42进行翻转。
111.具体的说,结合图4所示,壳体42由后壳421和盖板422构成,并且后壳421用于收纳手枪43和第一驱动组件44,手枪43可拆卸地设置在后壳421中。同时,后壳421 还与第二驱动组件45固定连接。另外,盖板422设置于后壳421上,并用于打开或封闭后壳421。并且,作为优选的方案,如图3和图4所示,该手枪设备还包括:可滑动地设置在壳体盖板422上的安装块47,并且该安装块47与手枪432的上膛套434可拆卸连接,例如,如图3所示,可将安装块47制作成一个卡箍结构,利用卡箍将上膛套434完全卡住抱死,并且安装块47在盖板422上的滑动方向与上膛套434的滑动方向相同。因此,在实际的使用过程中,可利用安装块47带动上膛套434进行滑动,实现对子弹的上膛操作。
112.此外,为了实现第一驱动组件对扳机435的扣动,第一驱动组件主要由一个设置在壳体42内的气缸和一个设置在壳体42内的压块,压块可直接设置在气缸的活塞杆上,通过活塞杆的往复运动以实现扳机435的扣动。另外,为了实现壳体42的翻转,如图3 和图5所示,上述所提到的第二驱动组件45主要是由一个设置在壳体42上的电机451 和穿过电机451的传动轴452构成。其中,传动轴452的两端分别穿过壳体42的两侧壳壁,并分别与第一侧板411和第二侧板412固定连接。由此不难发现,当电机451驱动传动轴进行转动时,电机451可借助传动轴452与第一侧板411和第二侧板412的固定关系,反向带动与其固定的壳体42进行翻转,从而实现了手枪在射击时俯仰角度的调节。并且,作为优选的方案,在本实施方式中,如图3所示,手枪设备4还包括:可拆卸地设置在壳体42内的激光瞄准器48,同时为了配合激光瞄准器48,该激光瞄准器48所射出的光线平行于枪膛434,并且在壳体42的后壳421上还开设出光孔49,该出光孔49 用于引出激光瞄准器48所射出的光线,从而可进一步提高手枪在实际作战时的设计精度。
113.另外,为了实现安装平台1的移动、转向以及手枪432在射击过程中左右角度的调节,在本实施方式中,如图6、图7和图8所示,行驶机构2包括:设置于下壳11内的主控板23、分别与主控板23电性连接的第一移动部21和第二移动部22,且第一移动部 21和第二移动部22用于沿垂直于安装平台1的前进方向相对固设在下壳11的两侧。另外,如图8所示,主控板23还与第一驱动组件44的气缸和第二驱动组件45的电机451 电性连接,从而可实现对气缸和电机451的控制。
114.具体的说,在本实施方式中,如图6所示,第一移动部21包括:设置于下壳11外的两个第一滚轮211和设置于下壳11内的两个第一电机212。其中,两个第一滚轮211 和两个第一电机212均沿安装平台1的前进方向相对设置。并且,各第一滚轮211和各第一电机212一
一对应,且各第一电机212的主轴分别用于穿过下壳11的壳壁与各自所对应的第一滚轮211同轴固定,用于驱动各自所对应的所述第一滚轮211进行滚动。
115.此外,如图6所示,第二移动部22包括:设置于下壳11外的两个第二滚轮221和设置于下壳11内的两个第二电机222。其中,两个第二滚轮221和两个第二电机222均沿安装平台1的前进方向相对设置。并且,各第二滚轮221和各第二电机222一一对应,且各第二电机222的主轴分别用于穿过下壳11的壳壁与各自所对应的第二滚轮221同轴固定,用于驱动各自所对应的所述第二滚轮221进行滚动。
116.在实际应用过程中,结合图8所示,两个第一电机212和两个第二电机222均与主控板23电性连接。因此,各第一电机212和各第二电机222均可在主控板23的控制下驱动各自所对应的滚轮进行滚动,从而实现整个安装平台1的移动。同时,主控板23可通过控制各电机之间的转速差实现安装平台1的转向以及手枪43在射击时左右角度的调节。并且,作为优选的方案,本实施方式中所采用的第一滚轮211和第二滚轮221均为麦克纳姆轮或橡胶轮,当第一滚轮211和第二滚轮221均采用麦克纳姆轮时,使得控制板对各电机转速差的控制,还能使得整个安装平台1可达到横移的效果。而当第一滚轮 211和第二滚轮221采用橡胶轮时,四个轮轮子采用独立的四部电机实现四轮驱动,可以让安装品台1灵活原地旋转来调整方向。
117.另外,需要说明的是,在本实施方式中,功能设备仅以手枪设备为例,而在实际的应用过程中,该功能设备也可以是云台摄像机、机械手臂、水炮枪、化学探测设备和激光地图构建设备中的任意一种,从而满足不同的引用场景。
118.并且,作为一种替换方案,上述所提到的第一移动部21还包括一根第一履带(图中未标示),而第二移动部22还包括一根第二履带(图中未标示)。其中,第一履带直接套设于两个第一滚轮211,而第二履带223直接套设于两个第二滚轮221。由于本实施方式中,第一移动部21和第二移动部22均包括了履带,借助履带良好的抓地性能,因此更有利于机器人通过复杂路况。同时,由于第一履带是直接套设在两个第一滚轮211上的,而第二履带是直接套设在两个第二滚轮221上的,因此在不需要履带的时候,例如在楼梯高度较小或者坡度小的情况下,可直接将履带取下,从而使得机器人可满足更多的工况。
119.另外,如图7所示,本实施方式的多平台机器人还包括:一电源和用于收纳电源(图中未标示)的电池仓5。其中,电池仓5设置在下壳11内,且电池仓5分别与第一移动部21的两个第一电机212、第二移动部22的两个第二电机222以及主控板23电性连接。同时,为了方便电源放入电池仓5内,本实施方式中所采用的电源为一个可拆卸的电池,且下壳11上还开设与电池仓5连通的开口(图中未标示),电池可通过下壳11上的开口插入至电池仓5内,同时当电池5在插入至电池仓5内后可与电池仓5电性导通,并借助与电池仓的电性导通实现对两个第一电机212、两个第二电机222和主控板的供电。其次,由于电池的安装时借助开设在下壳11上的开口实现,从而使得块电池的安装和拆卸极为方便。
120.本实用新型的第二实施方式涉及一种多平台机器人,第二实施方式是在第一实施方式的基础上作了进一步改进,其主要改进在于:如图9和图10所示,在本实施方式中,第一电机212的主轴214与第一滚轮211之间可采用可拆卸的方式进行安装,而第二电机222的主轴224与第二滚轮221之间同样可采用可拆卸的方式进行安装。
121.具体的说,如图9和图10所示,在本实施方式中,为了实现第一滚轮211与主轴 214
之间的可拆连接,主轴214包括:第一轴套2141,该第一轴套2141与第一电机212 的输出端固定连接,同时第一轴套2141上还开设第一锁孔2142、与第一锁孔2142连通的第一滑道2143,且第一滑道2143是沿垂直于第一轴套2141的轴线方向开设,并与第一轴套2141的底部连通。
122.另外,如图9和图10所示,该主轴214还包括:第一弹珠2144,该第一弹珠2144 沿可滚动地设置于第一滑道2143内,且第一锁孔2142的孔径小于第一弹珠2144的外径。
123.另外,如图9和图10所示,该主轴214还包括:第一推杆2145,该第一推杆2145 设置于第一轴套2141内,并有部分插入第一滑道2143,且第一推杆2145还用于沿第一滑道2143进行滑动,并在朝第一锁孔2142的方向进行滑动时推动第一弹珠2144进行滚动。
124.另外,如图9和图10所示,该主轴214还包括:第一锁芯2146,该第一锁芯2146 沿第一轴套2141的轴线方向可滑动地设置在所述第一轴套2141内。并且该第一锁芯2146 用于在向远离第一轴套2141的底部滑动时推动第一推杆2145朝第一锁孔2142的方向进行滑动。
125.另外,如图9和图10所示,该主轴214还包括:第一回弹部件2147,该第一回弹部件2147设置在第一轴套2141内并抵住第一锁芯2146,用于沿第一轴套2141的轴线方向对第一锁芯2146施加回弹力。
126.具体的说,如图9和图10所示,第一锁芯2146整体为一倒置的椎体结构,在装配过程中,如图9和图10所示,可预先在第一滚轮211轴孔的孔壁上开设用于被第一弹珠 2144嵌入的凹槽2111,当第一轴套2141插入第一滚轮211的轴孔内时,如图9和图10 所示,第一弹珠2144可在轴孔孔壁的作用下推动第一推杆2145在第一滑道2143内朝远离第一锁孔2142的方向进行滑动,而第一锁芯2146可借助自身椎体斜面,并在第一推杆2146的推动下向第一轴套2141的底部进行滑动,并压缩第一回弹部件2147。而当第一轴套2141在插入至第一滚轮211轴孔的预设位置时,如图11和图12所示,第一弹珠 2144可被带至轴孔孔壁的凹槽2111的位置处,使得孔壁不在对第一弹珠2111施加向内的作用力,此时第一锁芯2146可在第一回弹部件2147的回弹作用下向远离第一轴套2141 的底部进行滑动,而第一推杆2146可在第一锁芯2146滑动时,借助第一锁芯2146椎体斜面朝第一锁孔2142的反向进行滑动,并推动第一弹珠2111进入第一锁孔2142内,与第一锁孔2142相互卡合。由此不难发现,当第一弹珠2144与第一锁孔2142相互卡合,第一弹珠2144还有部分从第一锁孔2142外露于第一轴套2141外,并进入第一滚轮211 轴孔孔壁的凹槽2111内,从而实现对第一滚轮211的固定。
127.而当需要对第一滚轮211进行拆卸时,如图9和图10所示,操作人员可直接按压第一锁芯2146,使锁芯2146的椎体斜面不在与第一推杆2145相互抵持,以取消对第一推杆2145的预紧力,从而当第一滚轮211在向外拉拔时,第一弹珠2144可在第一滚轮 211轴孔孔壁的作用下轻松的脱离第一锁孔2142,并进入第一滑道2143中,以轻松实现第一滚轮211与第一轴套2141的分离。并且,为了方便操作人员按压第一锁芯2146,在本实施方式中,如图9和图10所示,还可在第一锁芯2146上设置一第一按压柱2148,该第一按压柱2148直接穿过第一轴套2141,可在第一滚轮211安装至第一轴套2141后位于第一滚轮211的轴孔内,以供操作人员按压。
128.此外,如图13和图14所示,为了实现第二滚轮221与主轴224之间的可拆连接,主轴224包括:第二轴套2241,该第二轴套2241与第二电机222的输出端固定连接,同时第二轴套
2241上还开设第二锁孔2242、与第二锁孔2242连通的第二滑道2243,且第二滑道2243是沿垂直于第二轴套2241的轴线方向开设,并与第二轴套2241的底部连通。
129.另外,如图13和图14所示,该主轴224还包括:第二弹珠2244,该第二弹珠2244 沿可滚动地设置于第二滑道2243内,且第二锁孔2242的孔径小于第二弹珠2244的外径。
130.另外,如图13和图14所示,该主轴224还包括:第二推杆2245,该第二推杆2245 设置于第二轴套2241内,并有部分插入第二滑道2243,且第二推杆2245还用于沿第二滑道2243进行滑动,并在朝第二锁孔2242的方向进行滑动时推动第二弹珠2244进行滚动。
131.另外,如图13和图14所示,该主轴224还包括:第二锁芯2246,该第二锁芯2246 沿第二轴套2241的轴线方向可滑动地设置在所述第二轴套2141内。并且该第二锁芯2146 用于在向远离第二轴套2241的底部滑动时推动第二推杆2245朝第二锁孔2242的方向进行滑动。
132.另外,如图13和图14所示,该主轴224还包括:第二回弹部件2247,该第二回弹部件2247设置在第二轴套2241内并抵住第二锁芯2246,用于沿第二轴套2241的轴线方向对第二锁芯2246施加回弹力。
133.具体的说,如图13和图14所示,第二锁芯2246整体为一倒置的椎体结构,在装配过程中,同理,如图13和图14所示,可预先在第二滚轮221轴孔的孔壁上开设用于被第二弹珠2244嵌入的凹槽2211,当第二轴套2241插入第二滚轮221的轴孔内时,第二弹珠2244可在轴孔孔壁的作用下推动第一推杆2245在第一滑道2243内朝远离第二锁孔2242的方向进行滑动,而第二锁芯2246可借助自身椎体斜面,并在第二推杆2246的推动下向第二轴套2241的底部进行滑动,并压缩第二回弹部件2247。而当第二轴套2241 在插入至第二滚轮221轴孔的预设位置时,如图15和图16所示,第二弹珠2244可被带至轴孔孔壁的凹槽2211的位置处,使得孔壁不在对第二弹珠2211施加向内的作用力,此时第二锁芯2246可在第二回弹部件2247的回弹作用下向远离第二轴套2241的底部进行滑动,而第一推杆2246可在第一锁芯2247滑动时,借助第二锁芯2246椎体斜面朝第二锁孔2242的反向进行滑动,并推动第二弹珠2211进入第二锁孔2242内,与第二锁孔 2142相互卡合。由此不难发现,当第二弹珠2244与第二锁孔2242相互卡合,第二弹珠 2144还有部分从第二锁孔2242外露于第二轴套2241外,并进入第二滚轮221轴孔孔壁的凹槽2211内,从而实现对第二滚轮221的固定。
134.而当需要对第一滚轮221进行拆卸时,如图13和图14所示,操作人员可直接按压第一锁芯2246,使锁芯2246的椎体斜面不在与第一推杆2245相互抵持,以取消对第一推杆2245的预紧力,从而当第一滚轮221在向外拉拔时,第一弹珠2244可在第一滚轮 221轴孔孔壁的作用下轻松的脱离第一锁孔2242,并进入第一滑道2243中,以轻松实现第一滚轮221与第一轴套2241的分离。并且,为了方便操作人员按压第二锁芯2246,在本实施方式中,如图13和图14所示,还可在第二锁芯2246上设置一第二按压柱2248,该第二按压柱2248直接穿过第二轴套2241,可在第二滚轮221安装至第二轴套2241后位于第二滚轮221的轴孔内,以供操作人员按压。
135.并且,作为优选的方案,为了能够使得第一滚轮211与第一电机212的主轴214连接的更为紧固、可靠,在本实施方式中,如图13和图14所示,第一弹珠2144、第一推杆2145均可设置多个,并绕第一轴套2141的轴线方向等距环设。同时,相应的第一滚轮211轴孔孔壁上的凹槽2111也开设有多个并与第一弹珠2144的数量相同,且一一对应。当第一滚轮211在于
第一轴套2141装配后,可通过多个第一弹珠2144与多个凹槽 2111的卡合,大大提高第一轴套2141与第一滚轮211的锁紧效果。同理,为了能够使得第二滚轮221与第二电机222的主轴224连接的更为紧固、可靠,在本实施方式中,如图13和图14所示,第二弹珠2244、第二推杆2245也可均设置多个,并绕第一轴套2241 的轴线方向等距环设。同时,相应的第二滚轮221轴孔孔壁上的凹槽2211也开设有多个并与第二弹珠2244的数量相同,且一一对应。当第二滚轮221在于第二轴套2241装配后,可通过多个第二弹珠2244与多个凹槽2211的卡合,大大提高第一轴套2241与第一滚轮221的锁紧效果。
136.本实用新型的第三实施方式涉及一种多平台机器人,第三实施方式是在第一实施方式的基础上作了进一步改进,其主要改进在于:如图17和图18所示,本实施方式的多平台机器人还包括:固设于下壳11内的第一减震件6、固设于上盖12上的第二减震件7。并且,当上盖12封闭下壳11后,第一减震件6与第二减震件7相互配合夹住主控板23。
137.通过上述内容不难发现,由于主控板23是通过上盖12上的第二减震件7与下壳11 内的第一减震件6实现在下壳11内夹持固定,从而使得整块主控板23可具备较好的抗震性能。
138.具体的说,如图17和图18所示,在本实施方式中,第一减震件6为一设置于下壳 11内的柔性垫圈,柔性垫圈用于承托主控板23,而第二减震件7包括若干个设置在上盖 12上的柔性柱121,且各柔性柱121均用于在上盖12封闭下壳11后抵住主控板23的上表面,并通过与柔性垫圈的配合将主控板23夹持于下壳11内,从而不但起到对主控板 23的固定,而且还可使主控板23具备一定的抗震性能。
139.另外,作为优选的方案,在本实施方式中,整个安装平台1处于第一移动部21和第二移动部22的中心位置,即整个安装平台1处于两个第一滚轮211和两个第二滚轮221 的中心位置,保证了整个安装平台1中无论上盖12或下壳11朝向地面,均不会与地面相抵,使得上盖12在没有安装功能设备时,整个安装平台1可不分正反面随意行驶。并且,在本实施方式中,下壳11和上盖12均采用高强度铝材制成,而第一滚轮211和第二滚轮221均采用高强度塑料制成,能够进一步增强机器人整体的强度和抗震性能,从而使得整个机器人可满足空投的作战需求。
140.本实用新型的第四实施方式涉及一种多平台机器人,第四实施方式是在第一实施方式的基础上作了进一步改进,其主要改进在于:结合图19和图10所示,本实施方式的多平台机器人还包括:分别与主控板23进行通讯的遥控终端,该遥控终端用于向主控板 23发送控制信号,主控板23在接收到控制信号后,可根据控制信号控制第一移动部21 的两个第一电机211和第二移动部22的两个第二电机221进行运转,从而实现机器人的前进、后退、转向、爬坡等操作。
141.另外,值得一提的是,在本实施方式中,如图19所示,本实施方式的多平台机器人还包括:设置在下壳11上的摄像装置,该摄像装置与遥控终端进行通讯,并用于获取下壳11四周的全景图像。同时,该遥控终端还用于显示摄像装置所获取到的全景图像。由此可知,在实际应用的过程中,操作人员可根据摄像装置所拍摄到的图像,可让操作人员清楚地知道当前机器人所行驶的地形,从而通过遥控终端可更为方便的对机器人进行操控。
142.具体的说,结合图19所示,摄像装置8包括若干个与主控系统电性连接的摄像头81,而在本实施方式中,如图1所示,设摄像头81共设有四个,且各摄像头81环设在下壳 11
的四周,且每个摄像头81分别对应下壳11的一侧进行安装,遥控终端还用于将各摄像头51所获取的外界图像进行组合拼接构成全景图像进行显示,使得操控人员可以借助遥控终端看到机器人四周的场景,避免了盲点的产生。
143.另外,值得一提的是,当功能设备为云台摄像机时,云台摄像机也可与遥控终端进行无线通讯,遥控终端也可同时显示云台摄像机所拍摄到的图像,并可与摄像装置8所拍摄到的图像进行切换显示。
144.本领域的普通技术人员可以理解,上述各实施方式是实现本实用新型的具体实施例,而在实际应用中,可以在形式上和细节上对其作各种改变,而不偏离本实用新型的精神和范围。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。