一种基于psd的工业机器人重复性和协同性测量装置
技术领域
1.本实用新型涉及了一种用于工业机器人性能测量的装置,尤其是涉及了一种基于psd的工业机器人运动的空间位置重复性(以下简称“重复性”)和多机协同性(以下简称“协同性”)测量装置。
背景技术:
2.psd位置传感器是一种能测量光点在探测器表面上连续位置的光学探测器。是一种新型的光电器件,或称为坐标光电池。它是一种非分割型器件,可将光敏面上的光点位置转化为电信号。psd由p衬底、pin光电二极管及表面电阻组成。具有位置分辨率高,响应速度快和处理电路简单等优点。
3.现有的psd位置传感器只能测量一维和二维的坐标,即一维psd可以测定光点的一维位置坐标,二维psd可以测定光点的平面位置坐标。但都无法测定光点的三维空间坐标,具有一定的局限性。
技术实现要素:
4.为了解决背景技术中存在的问题,本实用新型所提供了一种基于psd的工业机器人重复性和协同性测量装置,解决了现有psd位置传感器无法测量光点的三维空间坐标的技术问题。
5.本实用新型采用的技术方案是:
6.两个工业机器人相对安装,两个工业机器人的末端之间安装有测量组件,测量组件包含测量单元和发射单元两部分,发射单元包含激光发射器和分光镜,测量单元主要由第一双轴psd传感器、第二双轴psd传感器和一个安装座组成,第一双轴psd传感器和第二双轴psd传感器通过安装座相互垂直固定布置安装,激光发射器发射激光经分光镜发生反射和透射后,分别入射到第一双轴psd传感器和第二双轴psd传感器上。
7.所述的激光发射器通过一个固定支架固定安装在一个工业机器人的末端,第一双轴psd传感器和第二双轴psd传感器连接后共同通过另一个固定支架固定安装在另一个工业机器人的末端。
8.第一双轴psd传感器和第二双轴psd传感器均各有两个测量轴,第一双轴 psd传感器的两个测量轴相互垂直,第二双轴psd传感器的两个测量轴相互垂直,共四个方向;第一双轴psd传感器和第二双轴psd传感器各自其中一个测量轴相互平行作为第一轴,即方向相同,第一双轴psd传感器和第二双轴psd 传感器各自其中另一个测量轴相互垂直,第一双轴psd传感器的另一个测量轴和第二双轴psd传感器的另一个测量轴分别为第二轴和第三轴,第一轴、第二轴和第三轴均相互垂直正交,构成了三维正交坐标系,三维正交坐标系用于记录机器人末端空间位置的相对变化量;开启激光发射器,激光发射器发射的激光经过分光镜的折射,分成两路,其中一束激光保持原来的方向,另一束激光在原方向的基础上折射90
°
。此时,第一双轴psd传感器4和第二双轴psd 传感器5接收到激光信号并通过配套的测
量软件显示位置数据。
9.本实用新型的有益效果是:
10.本实用新型的装置,在不改变psd位置传感器测量精度的情况下,可以用于解决现有psd位置传感器只能对一维和二维位置坐标进行测定的局限性,并将测量维度提升到三维,可以测定三维空间的位置坐标,一定程度上拓展了psd 位置传感器的使用场景和测量对象。
附图说明
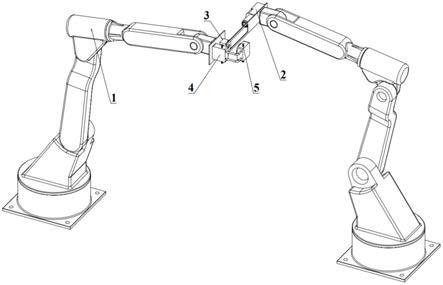
11.图1为本实用新型的总体结构图;
12.图2为本实用新型的测量组件的局部结构图;
13.图3为本实用新型两个双轴psd传感器的测量轴布置关系图。
14.图中:工业机器人1、激光发射器2、分光镜3、第一双轴psd传感器4、第二双轴psd传感器5。
具体实施方式
15.下面结合附图及具体实施例对本实用新型作进一步详细说明。
16.两个工业机器人1相对安装,两个工业机器人1的末端之间安装有测量组件,测量组件包含测量单元和发射单元两部分,发射单元包含激光发射器2和分光镜3,测量单元主要由第一双轴psd传感器4、第二双轴psd传感器5和一个安装座组成,第一双轴psd传感器4和第二双轴psd传感器5通过安装座相互垂直固定布置安装,激光发射器2发射激光经分光镜3发生反射和透射后,分别入射到第一双轴psd传感器4和第二双轴psd传感器5上。
17.激光发射器2通过一个固定支架固定安装在一个工业机器人1的末端,第一双轴psd传感器4和第二双轴psd传感器5连接后共同通过另一个固定支架固定安装在另一个工业机器人1的末端。
18.如图3所示,第一双轴psd传感器4和第二双轴psd传感器5均各有两个测量轴,第一双轴psd传感器4的两个测量轴相互垂直,第二双轴psd传感器 5的两个测量轴相互垂直,共四个方向;第一双轴psd传感器4和第二双轴psd 传感器5各自其中一个测量轴相互平行作为第一轴,即方向相同,第一双轴psd 传感器4和第二双轴psd传感器5的各自其中另一个测量轴相互垂直,第一双轴psd传感器4的另一个测量轴和第二双轴psd传感器5的另一个测量轴分别为第二轴和第三轴,第一轴、第二轴和第三轴均相互垂直正交,构成了三维正交坐标系,三维正交坐标系用于记录机器人末端空间位置的相对变化量。
19.即如图3所示,两个psd测量单元的psd探测器平面在空间上为互相垂直的位置关系,每个平面拥有各自的坐标系。1号平面为x,z轴坐标系,2号平面为x,y轴坐标系,两个平面在空间上为互相垂直的位置关系,两个平面具有共同的x轴坐标系。
20.开启激光发射器2,激光发射器2发射的激光经过分光镜3的折射,分成两路,其中一束激光3保持原来的方向,另一束激光在原方向的基础上折射90
°
。此时,第一双轴psd传感器4和第二双轴psd传感器5接收到激光信号并通过配套的测量软件显示位置数据。
21.开启激光发射器2,激光发射器2发射的激光经过分光镜3的折射,分成两路,其中一束激光3保持原来的方向,另一束激光在原方向的基础上折射90
°
。此时,第一双轴psd传
感器4和第二双轴psd传感器5接收到激光信号并通过配套的测量软件显示位置数据。
22.这样通过分光镜后形成相互垂直的两束激光,其中一束平行于出射激光,另一束垂直于出射激光。两束激光分别射在测量单元的第一双轴psd传感器4 和第二双轴psd传感器5上,psd传感器能够探测到激光束的能量中心点在第一双轴psd传感器4和第二双轴psd传感器5上的位置,这个位置以两个相互垂直的两个值来表示。
23.本实用新型在进行工业机器人的重复性测量过程如下:
24.首先将发射单元和测量单元进行安装固定。
25.然后移动工业机器人1末端,使发射单元的激光发射器2经分光镜3后的两束激光分别射在测量单元的第一双轴psd传感器4和第二双轴psd传感器5 的大致中心位置,记录并设定该位置为参考位置,同时,工业机器人1各关节的角度也分别被记录。
26.测量时,使工业机器人1末端从其他空间位置以设定的路径移动到参考位置,并使各关节的角度保持一致。
27.此时测量单元的第一双轴psd传感器4和第二双轴psd传感器5都能接收到激光并记录坐标值,这些坐标值通过测量软件分析处理会得到一个空间坐标值。
28.重复多次移动,记录并计算每一次测量的空间坐标值,通过计算每次测量的空间坐标值及其自身统计的平均值或预设参考值之间的差值,得到工业机器人末端空间位置的重复性。
29.本实用新型在进行工业机器人的协同性测量过程如下:
30.进行协同性测量时,选择处于同一控制系统下的两台或多台工业机器人1,将发射单元和测量单元进行安装固定装在两台工业机器人的末端法兰之间上。
31.然后分别移动两台工业机器人1末端到一个合适的位置,使发射单元的激光发射器2经分光镜3后的两束激光分别射在测量单元的第一双轴psd传感器 4和第二双轴psd传感器5的大致中心位置,记录并设定该位置为参考位置。
32.记录并设定在该参考位置下的两台工业机器人1末端执行机构即psd测量装置之间的位置与姿态的相互关系。
33.测量时,控制该两台工业机器人末端始终在该相互位置和姿态关系下,以设定的轨迹进行同步运动。此时,测量单元的第一双轴psd传感器4和第二双轴psd传感器5能够测量并记录这两台工业机器人末端的相互位置变化量。通过专用测量软件,以一定时间间隔进行动态采样或者采集多个预设位置的数值,计算得到多机协同性。
再多了解一些
本文用于企业家、创业者技术爱好者查询,结果仅供参考。